2021年7月10日の第129回月例発表会(M1)において,山本 浩太郎(M1),池田 仁(M1),竹内 一真(M1),杉本 涼輔(M1),塚崎 拓真(M1)の5名が以下のタイトルで発表を行いました.
ダイナミックマップの時空間グリッド予約システムを利用した自動バレー駐車制御方式(山本 浩太郎)
近年,自動バレー駐車(以下,AVP)システムの研究・開発が行われている.AVPシステムとは,ユーザの鍵を預かり駐車場側が人手を使って駐車や出庫を行うサービスを,自動運転の技術を使って無人で実現するものである.車両の走行調停については,車両側のセンシングや制御機能に依存する方式,駐車場に備えるインフラに依存する方式,両者の中間をとって機能分担する方式が考えられている.
また,車両の走行調停手法として時空間グリッド予約システムがある.時間と道路上の空間をグリッドに分割し,ダイナミックマップと呼ばれる車両情報や道路情報を情報の更新頻度によって階層化して管理するシステム上で管理し,各車両が事前に特定の時刻に通過予定の地点を予約し,予約情報に基づいた調停・走行を行うものである.先行研究ではこの基礎となるシステムを単一交差点を想定して構築し,旅行時間や計算量において考察が行われ,他の走行調停手法に比べて有用である可能性を示した.本研究では,このシステムを発展させ,AVPにおける制御方式を提案する.
ROS2 を搭載した小型 UAV の協調制御による 3 次元空間マッピング手法(池田 仁)
近年,UAV(UnmannedAerialVehicle)が農業,インフラ点検,運送業など多くの産業分野で注目を集めており,研究開発が盛んに行われている.UAVの自律飛行において,屋外ではGPSを用いた位置計測が一般的であり,GPSの受信が困難である屋内環境や橋梁では自律飛行が困難であるという問題点があった.その問題を解消するための技術としてSLAM(SimultaneousLocalizationandMapping)というものがある.SLAMは,GPSが使用できない場所でも自律飛行ができる自己位置推定と3次元空間マッピング技術であり,原発事故で人が立ち入れない原子炉建屋内での調査飛行,トンネルの点検,インフラ設備の点検など,さまざまな応用分野で用いられている.SLAMはLiDARやカメラ,IMU(InertialMeasurementUnit)などからのセンサ情報を元に自己位置推定と周辺のマッピングを行う.そのため,UAVが搭載しているセンサ情報処理機構の性能によって,自己位置推定やマッピングをするのにかかる時間が大きく左右される.現在,UAVのセンサ情報を処理するものとして,一般的にROS(RobotOperatingSystem)が用いられている.しかし,ROSには単一のものしか制御できない,通信のリアルタイム性が低いなどの問題点がある.そのため,ROSを搭載したUAVでは,単一のUAVで3次元空間をマッピングすることになり時間がかかってしまう.そこで本研究では,ROS2(RobotOperatingSystem2)を用いることによりUAVを複数制御し,リアルタイムに通信を行うことにより,SLAMによるマッピングをより効率的に行う手法を検討する.
共通座標系を用いた死角領域内の AR 共有化によるドローン操縦の安全性向上(竹内 一真)
近年,ドローンは空中を移動することで高い機動性を発揮し,素早く接近できることから,建築物や社会インフラの点検等の狭小空間に適した機器として注目されている。しかし,狭小空間でのドローンの飛行は遮蔽物が多く,遮られた視点からの操縦を必要するため操縦は困難な場合がある.
そこで,AR(AugmentedReality)を用いることで操縦者の死角領域内を可視化し,ドローン 近傍の障害物を検知する方式を提案した.操縦者にとってどのような情報が障害物までの距離感を掴むのに適しているかを検討した結果,ドローン周辺の障害物に危険度を振り分けているAR方式が操縦者へ安心感を与え,操縦性の向上を示した.
しかし,実際にドローンを使用する場面では複数のドローンを協調的に用いることで,より効率的な作業が行えることが考えられるため,複数のドローンが飛行する環境下において安全に衝突しない取り組みを行う必要がある.また,複数人で複数のドローンを扱う環境を,ARを用いた死角領域内の可視化による手法を用いて操縦させる場合,各操縦者がそれぞれ共通のAR表示を行う必要があり,AR表示に位置ずれが起きてしまうと空間整合性の欠如が考えられる.本研究では,ARにより表示された複数のドローン及びその周辺の環境を,ARマーカーを用いて共通座標系を作成することで,複数人でリアルタイムに確認できる手法を提案する.これによりドローンが複数飛行する場合においても,ドローンの安全性を向上させることを目指す.
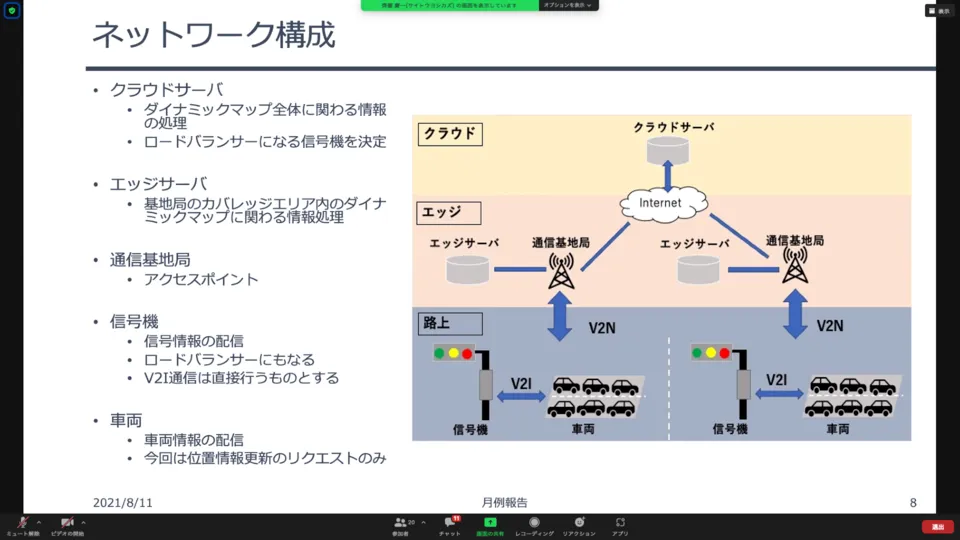
V2X 通信における RSU の配置を考慮した CRL 配信の効率化手法(杉本 涼輔)
近年,V2X(VehicletoEverything)通信に関する研究が盛んに行われている.このV2X通信は交通の安全性や効率を向上させることが期待されているが,車両の位置情報やIDなどの情報をメッセージでやりとりするため,セキュリティやプライバシの問題が課題である。その解決策の一つとして認可局と呼ばれる機関が各車両に仮名と呼ばれる一時的な車両IDを与え,それを用いて作成したPKI(PublicKeyInfrastructure)ベースの電子証明書をメッセージに付与し,その後仮名を別のものに変更することでプライバシを保護する手法が検討されている.この手法のアーキテクチャについて図1に示す.この手法では,失効局と呼ばれる機関が不正な振る舞いをした車両や,機器のトラブル等によって正常な動作が期待できなくなった車両の仮名を失効させ,その失効させた車両のIDや全ての仮名を他車両に周知させるためにCRL(CertificateRevocationList)と呼ばれるリストを配布する必要がある。しかし,この仮名変更方式では,失効した車両が増加するとCRLリストのデータサイズが爆発的に増えてしまうという問題があり,この効率的な配布について様々な研究が行われている.本研究では,道路をグリッドに分け,グリッドごとにRSU(RoadSideUnit)との通信可否や車両の有無を判別し,それによりRSUからのV2I(VehicletoInfrastructure)通信とV2V通信,およびセルラ通信を切り替えてCRLを配信する手法を提案する.
ホームネットワークにおける OpenFlow を用いたトラフィック監視によるセキュリティ向上(塚崎 拓真)
近年,IoT(InternetofThings)が注目を集めるようになり,今後あらゆるものがネットワークに接続され,利用されることが予想される.それに伴い,ネットワーク内には様々な端末や機器(まとめて,デバイス)が混在することになり,ホームネットワークの形態は多様化していくと考えられる.
しかし,IoTの登場で利便性が高まる一方で,これまでのネットワークに接続されていないモノが接続されることにより,セキュリティ上のリスクが高まっている.IoTデバイスはセキュリティを考慮せずに開発されたものが多いため,悪意のある攻撃者によるサイバー攻撃の標的になりやすく,特に不正アクセスが多発している.セキュリティ上の脅威が各種デバイスやネットワークごとに顕在した場合,個別に対処するとコストや時間がかかってしまうため,脅威に対し一括に対処する必要がある.しかし,ホームネットワーク内には異なる規格のハードウェアやそれらに搭載される様々なアプリケーションが混在しているため,それら全てに対応したシステムの構築や更新を続けるのは困難である.そのため,ホームネットワーク内で通信するのであれば,どのデバイスも必ず利用するネットワークを利用したシステムを構築することが望ましい.本研究では,OpenFlowを用いて,ホームネットワークに適した形での不正な通信の検知を検討する.