こんにちは,広報の鐵野(B4)です.
2025年8月18日の研究室合同中間発表会において,M2の5名, 田牧 浩月,髙田 陽輝,岩井 駿人,梅田 寛斗,松本 翔汰 が発表を行いました.
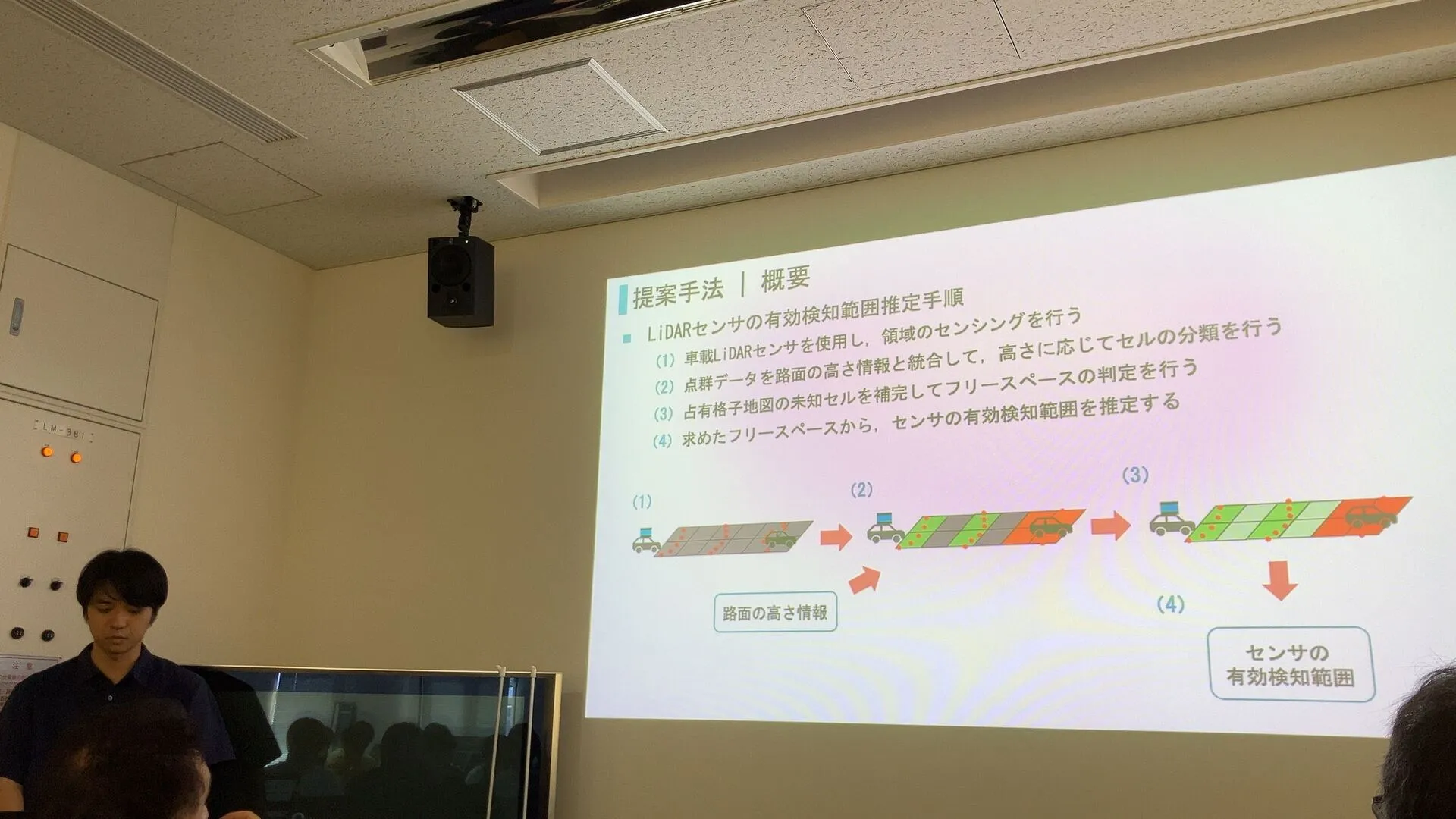
フリースペースの直接検知を用いた車載センサにおける有効検知範囲推定手法 (田牧 浩月)
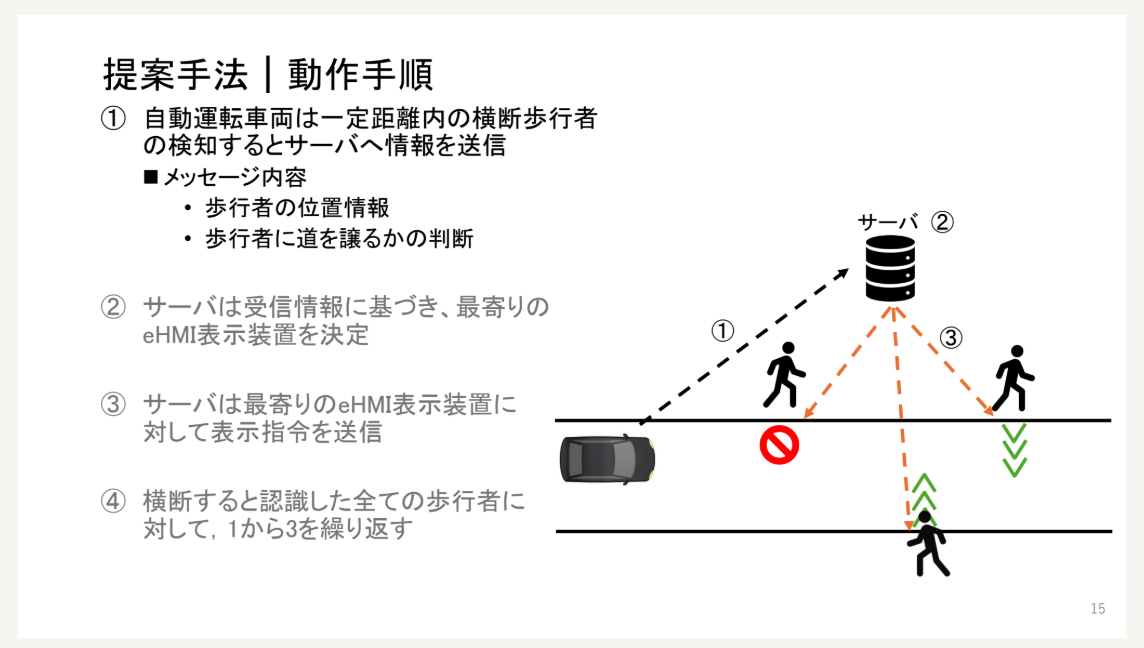
近年,自動運転車両の開発が進んでおり,交通事故を引き起こす人為的な誤りを減少させることが期待されている.しかし,運転者が不在の自動運転車両では,歩行者は車両側の走行に関する意図がわかりにくく,歩行者の安全性や安心感に対して影響を及ぼす問題がある.例えば,手動運転車両の場合,歩行者は車速情報に加えて,運転者とのジェスチャーやアイコンタクトなどの非言語的なやり取りを通じて,安全に横断できるタイミングを判断できる.一方で,自動運転車両の場合,歩行者は運転者との非言語的なやり取りを行えない場合があるため,車両の進行意図や停止意図を把握しにくく,横断に対する意思決定が困難になる.そこで,自動運転車両と歩行者間とのコミュニケーションに有効な様々な外向けヒューマンマシンインターフェース(eHMI)が提案されている.しかし,現状では主に1人の歩行者がいる状況を前提にしたeHMIが提案されており,複数の歩行者がいる状況を考慮していない問題が挙げられる.そこで本研究では,複数の歩行者に対して,それぞれの位置に最も近い車道にeHMIを直接表示することで,自動運転車両と複数の歩行者がいる状況での安全性向上と安心感向上を検討する.
安全運転支援のためのパスプラン可視化手法の検討 (髙田 陽輝)
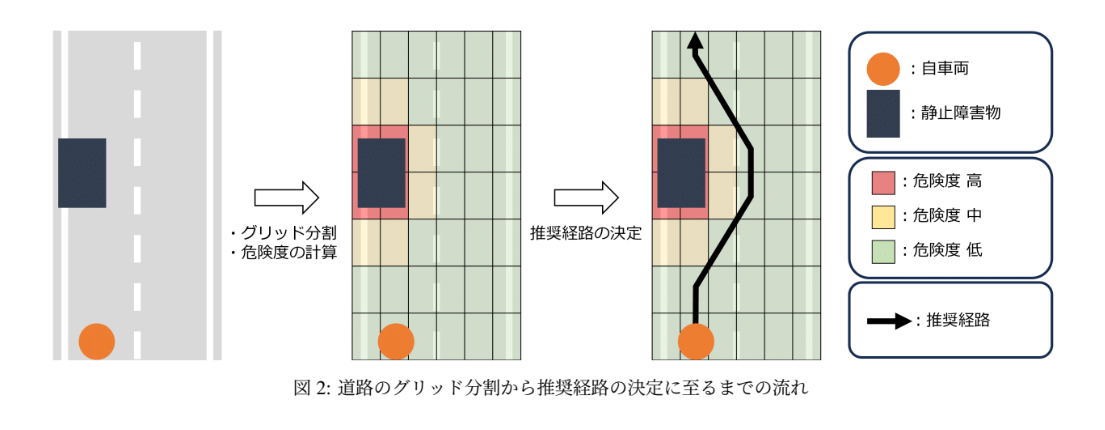
近年,高度交通システム(ITS:IntelligentTransportSystems)を活用した安全運転支援が注目されている.ITSは,最新の情報通信技術によって人・道路・車両を繋ぐことで,交通問題の解決を目指すシステムである.これにより,自車両が認識できる範囲を超えて,他車両や路側機が検知した情報を共有することが可能となる.そして,死角からの危険の早期察知や,見通しの悪い交差点での事故防止など,交通事故の削減への貢献が期待されている.ITS の技術を用いた手動運転車両のドライバに対する安全運転支援の手法として,死角の物体を可視化して提示する手法や,フリースペースの危険度を可視化して提示する手法が検討されている.これらの手法により,ドライバは危険な物体の存在やフリースペースの安全性を把握することが可能になる.しかし,図1に示すような,直線道路に路上駐車中の車両とその死角に対向車が存在する状況において,対向車の可視化やフリースペースの危険度の可視化を行っても,それらの情報からドライバはどのような経路でどのように運転するべきかを視覚的に把握できない.そこで,本研究では手動運転車両のドライバに対する安全運転支援を目的に,図1に示すような直線道路上に障害物が存在する状況において,どのような経路をどのように運転すれば良いかというパスプランを可視化する手法を検討する.
BYTEに基づく多段階分類による物体追跡手法の提案 (岩井 駿人)
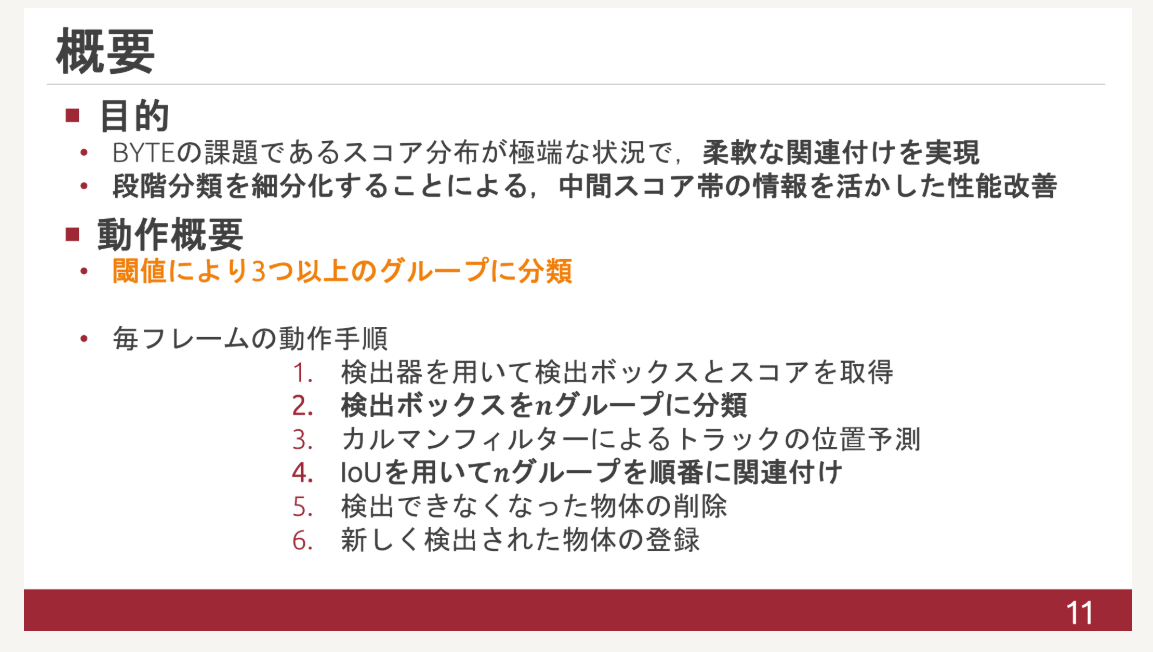
近年,MOT(Multiple Object Tracking,物体追跡)の研究分野が多くの注目を集めている.これは,自動運転技術や監視システム,ロボティクスなど,様々な分野での応用が期待されているためである.特に,自動運転車の普及に伴い,限られたリソースの中で正確かつリアルタイムで動作するMOT技術の必要性が高まってきている.このような背景から,MOTアルゴリズムの最適化が重要な課題となっている.MOTの実現には,大別してTBD(Tracking-by-Detection)とEnd-to-End と呼ばれる 2 種類のアルゴリズムが存在する.TBDは,物体検出と追跡のフェーズを分けて考える手法で,End-to-End と比べ性能が高くなりやすい特徴がある.それに対しEnd-to-Endは,物体検出と追跡をまとめ,入力から出力を一貫して考える手法で,TBDと比べ処理速度が速くなりやすい特徴がある.検出と追跡を個別に最適化できる点から,TBDは多くの研究で採用されており,本研究でもTBDに焦点を当てている.MOT の性能評価には,MOT17 や MOT20 というデータセットが,アルゴリズムのベンチマークとして広く用いられている.これらのデータセットを基に,数多くのアルゴリズムが提案,実装されてきた.本研究では,MOT17 や MOT20 などにおいて世界最高レベルの性能を記録しているBYTEと呼ばれるアルゴリズムに着目し,その改良を目指す.
時空間ボクセル予約による複数ドローンの効率的飛行調停手法の提案 (梅田 寛斗)
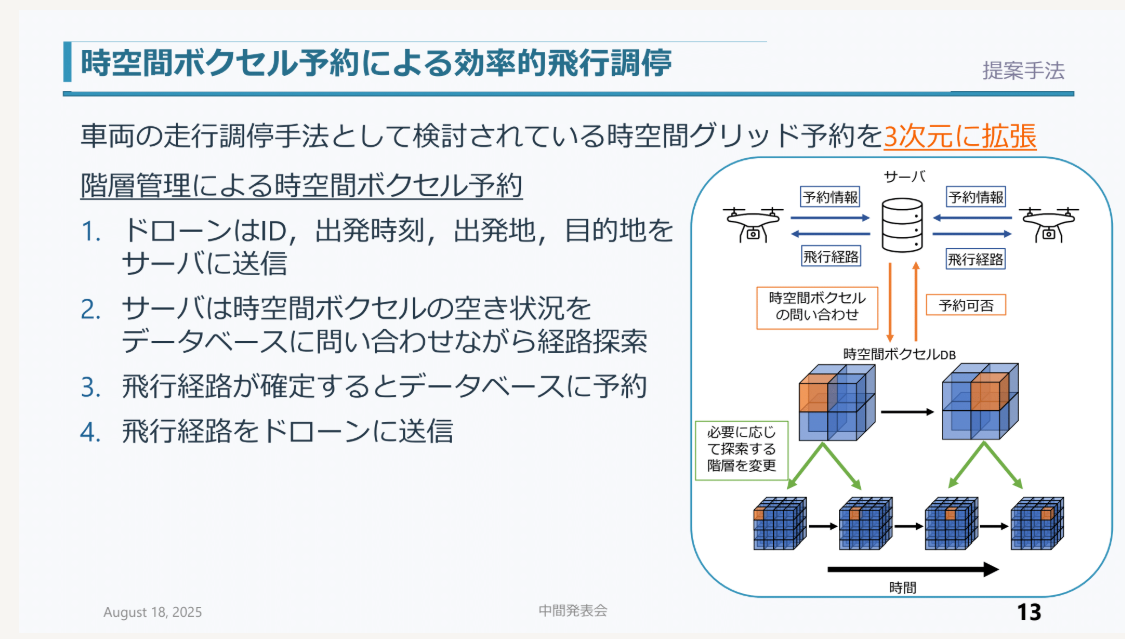
近年,物流,3次元測量,インフラ点検などの分野でドローンの活用が進んでいる.多数のドローンが同一エリアを飛行する環境では,飛行経路の交差により衝突が発生する.衝突回避手法として,センサやカメラを用いて周囲を認識する手法があるが,遠距離の障害物の検出が困難であることや,天候の影響で性能が低下するという課題がある.そこで,通信を用いてドローンの情報を集中制御システムに集約し,全てのドローンの経路を一括で計算することにより衝突を回避する手法が検討されている.しかし,全機の経路を一括で計算する方式では,ドローン数の増加に伴い計算量が膨大になるという問題がある.現在,建造物や飛行体の情報を効率的に管理する手法として,4次元情報の活用が検討されている.これは,3次元空間を直方体の格子状に分割した空間ボクセルに時間情報を統合して管理するシステムであり,時間と空間を一体として扱うことで,より正確な状況把握と制御が可能となる.さらに,空間ボクセルは階層構造で管理され,用途に応じて粒度の調整が可能である.本研究では,空間ボクセルと時間情報を統合した時空間ボクセルを定義し,ドローンが通過予定の時空間ボクセルを事前に予約し,予約情報に基づいて飛行調停を行う手法を提案する.また,空間の状況に応じて参照する階層を動的に調整することで,飛行調停時の計算時間短縮を目指す.
協調型自動運転におけるNR-V2X通信を用いたユニキャスト通信の有効性検討(松本 翔汰)
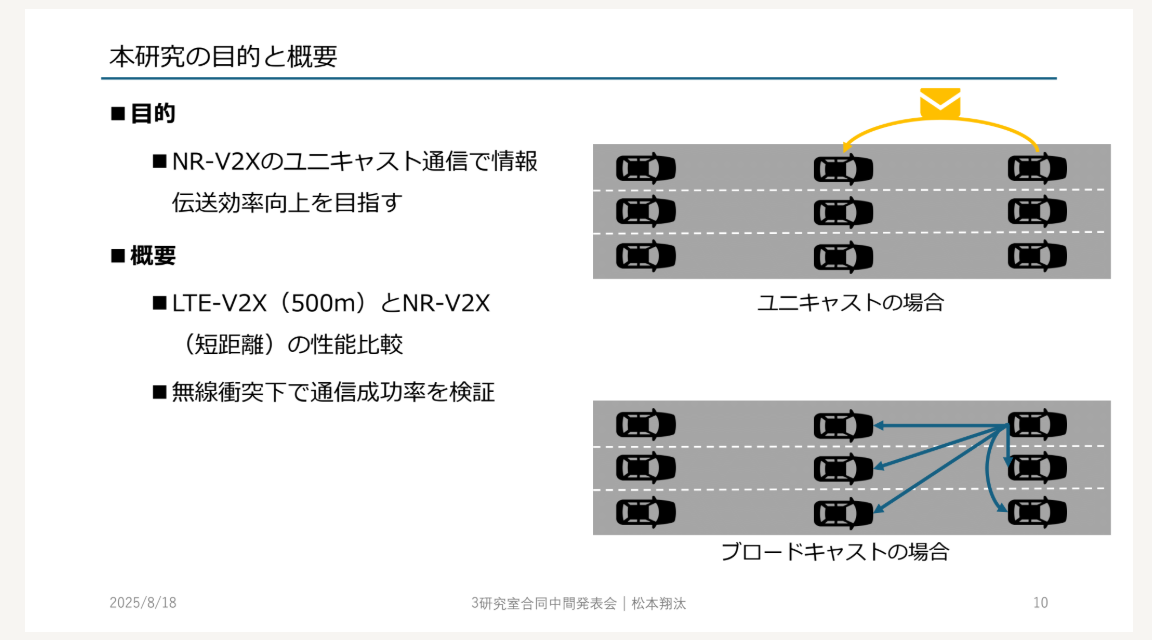
近年,協調型自動運転の研究が活発化している.協調型自動運転は,自車両のセンサー情報だけでなく,他車両や道路インフラなどの情報を通信によって取得し,より安全かつ効率的な運転を実現する技術である.従来の自律型自動運転では,車載センサーのみで認識・判断・操作を行うため,センサー検知範囲外の情報取得が困難であり,交通事故リスクが伴う.協調型自動運転では,V2V(車両間通信),V2I(車両とインフラ間通信),V2P(車両と歩行者間通信),V2N(車両とネットワーク間通信)など,V2X(Vehicle to Everything)通信を活用することで,動的な情報を広範囲に取得できる.V2X通信は,主に無線通信技術を用いて車両やインフラ間で情報を交換する方式であり,通信範囲や用途に応じて複数の規格が存在する.代表的な方式として,IEEE802.11p(DSRC)やセルラー方式(C-V2X)が挙げられる.DSRCはWi-Fiベースの短距離通信で,主にブロードキャスト型通信を提供する.一方,C-V2Xは携帯電話網を活用した方式であり,より広範囲かつ高信頼な通信が可能となっている.これらV2X通信の規格には,LTE-V2X や NR-V2X などがあり,LTE-V2X はブロードキャスト通信のみをサポートするのに対し,NR-V2Xではユニキャスト通信も可能となっている.本研究では,V2V通信におけるユニキャスト方式を用いて各車両の情報伝達効率化を目指し,ユニキャスト方式とブロードキャスト方式の性能比較を行う.