こんにちは,広報の馬渕(B4)です.
2025年7月19日の第169回月例発表会において,M1の7名, 野田 虎之介, 藤原 直己, 松浦 薫, 森 梓恩, 徳重 柊人, 富成 泰生, 奚 浩然 が発表を行いました.
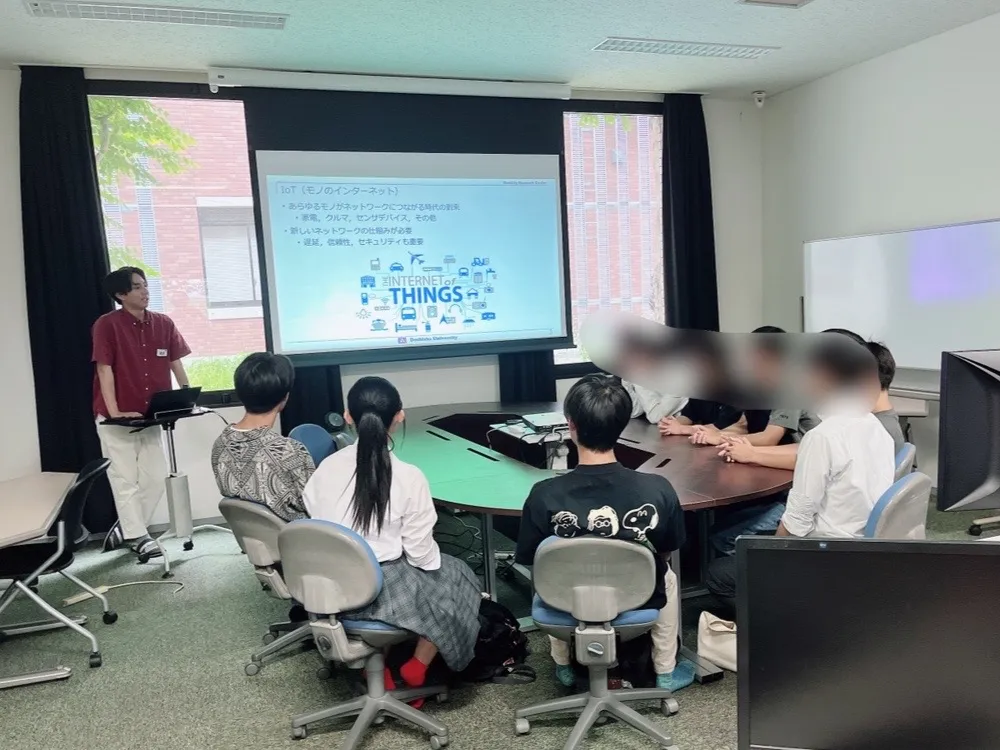
フリースペースの直接検知を用いた車載センサにおける有効検知範囲推定手法 (野田 虎之介)
近年、自律型自動運転技術の発展により、車両が周囲環境を自律的に認識し、安全に走行するための研究が活発に進められている。自律走行車両は、車載センサを用いて、歩行者や他車両などの周辺物標を検知し、その情報に基づいて走行制御を行う。従来の環境認識では、物標の位置や速度を示す物標情報に基づいて判断が行われてきた。しかし、通信エラーやセンサ設置環境の悪化などにより、物標が存在していても物標情報が取得できない場合があり、そのような場合でも当該領域は物標が存在しないとみなされ、安全と誤認される可能性がある。また、物標情報は物標を検知したときにのみ出力されるため、物標が存在しない場合と検知漏れによる無出力とを区別することができない。すなわち、物標情報のみでは、センサが実際に検知できている領域と、検知できていない領域を識別することは困難である。さらに、車載センサは移動体に搭載されているため、その検知範囲は時間的・空間的に常に変動する。したがって、物標情報のみに基づく手法では、センサの有効な検知範囲を正確に特定することができず、結果として未検知領域を誤って安全な走行可能領域と認識し、重大な事故につながる可能性がある。本研究では、道路およびその周辺において物標が存在しない領域をフリースペースと定義し、路面を検知することによるフリースペースの直接検知と、それに基づくセンサの有効検知範囲の推定を組み合わせた周囲環境認識手法を提案する。これにより、従来の物標情報のみでは困難であった検知信頼性の向上と安全性の強化を実現する。
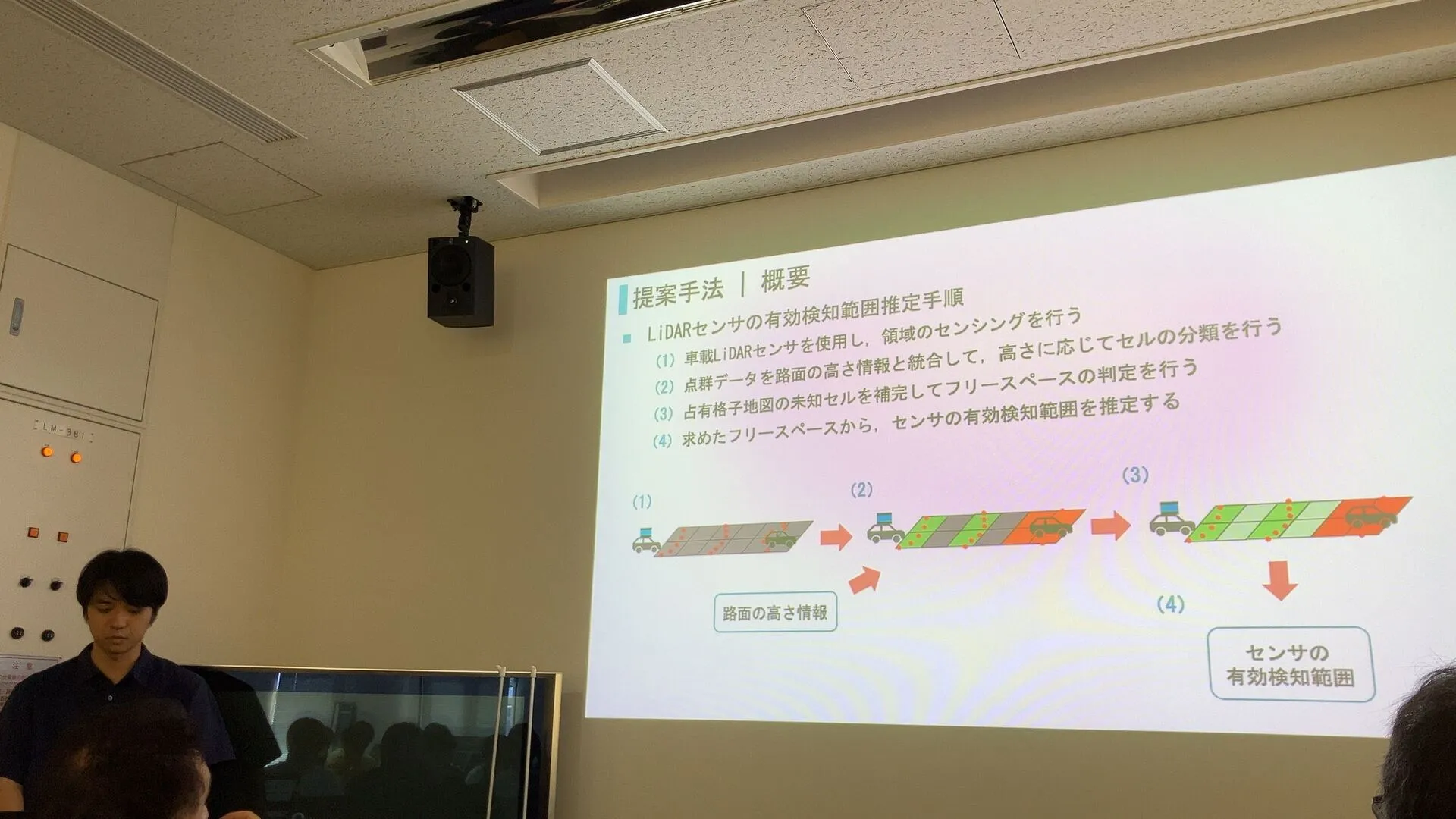
時空間ボクセル予約による群飛行ドローンの飛行調停手法の検討 (藤原 直己)
近年、ドローンは幅広い領域で活用が進められている。特に、市街地への宅配をはじめとする物流、インフラ点検や測量、農業といった分野では実証実験が進められるなど、実現に向けた取り組みが活発化している。しかし、ドローンはバッテリー容量の観点から飛行継続時間や距離が限られている。そのため、ドローンのフォーメーション制御が注目されている。複数のドローンが適切なフォーメーションを組んで飛行することで、推進効率の改善や揚力上昇により消費電力を抑えることができる。また、作業を分担して行うことにより、作業効率が大幅に向上するという利点もある。しかし、複数のドローンが飛行する空域において、ドローン群と他機との飛行経路が交差することにより、衝突が発生するという課題がある。そのため、衝突回避行動をとる必要があるが、空域が混雑している場合、すべてのドローンを回避するためには膨大な計算をする必要があり、安全に飛行することが困難であるという課題がある。そこで、本研究ではフォーメーション飛行時におけるドローンの安全な飛行を実現することを目的とし、時空間ボクセル予約によるドローンのフォーメーション制御手法を検討する。
移動環境におけるデータ配信効率化のためのMedia over Multipath QUIC の設計 (松浦 薫)
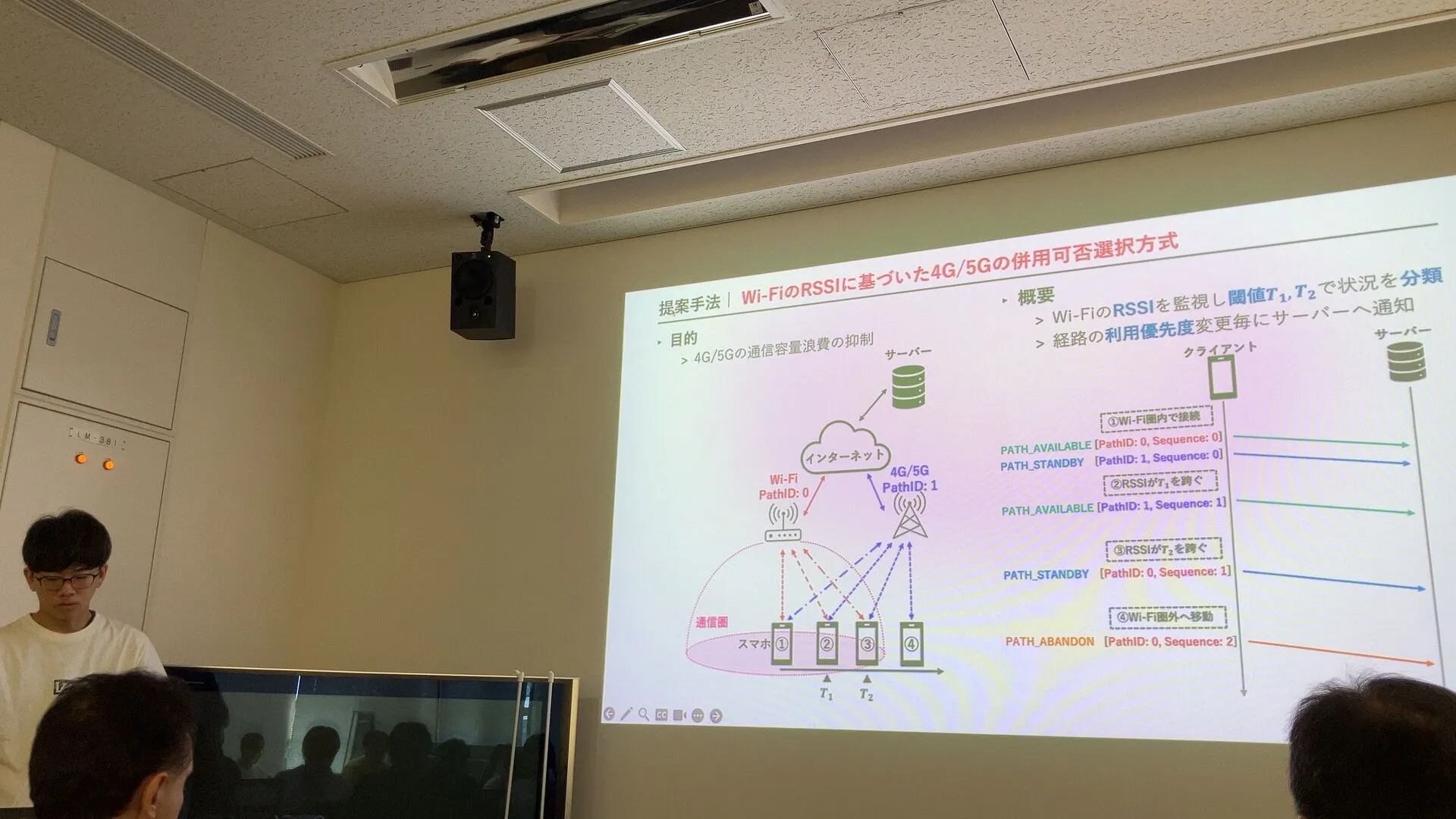
通信プロトコルのQUICは、通信インタフェースの変更に伴ってIPアドレスが変化した際に、同じコネクションで通信を継続するマイグレーション機能を備えている。そのため、コネクションを再確立する必要があったTCPとは異なり、アプリケーションデータの送信を中断しない。ただし、車両走行時や歩行時といった移動環境において単一の通信インタフェースを使用する場合、電波強度不足や遮蔽物による電波障害で一部のパケットが欠落し、高い通信速度を維持することが難しい。そこで、複数の通信インタフェースを同時使用を可能にするマルチパス拡張(MPQUIC)を導入し、通信帯域の集約によって高い通信速度を安定的に供給することが期待される。MPQUICには、接続した通信経路毎に利用優先度を設定し、それをピアに通知する機能が搭載されている。しかし、特定の通信経路の通信状況に基づいて動的に他の通信経路の併用可否を選択する仕組みを欠くため、ユーザーが無料で通信可能なWi-Fiと従量課金制のセルラー回線を併用し、セルラー通信容量を浪費するリスクがある。本研究では、新興のメディア配信プロトコルであるMedia over QUIC(MoQ)に対してマルチパス拡張機能を統合し、クライアントが最優先に設定する通信経路の電波受信状況に基づいて、動的に他の通信経路の併用可否を選択する設計を提案する。そして、移動環境下のクライアントに対して動画データを配信するシナリオにおいて、視聴品質の改善とセルラー通信コストの抑制の両立を実現するか検証する。
合流時における NR-V2X ユニキャストのための無線リソース割り当て方式の検討 (森 梓恩)
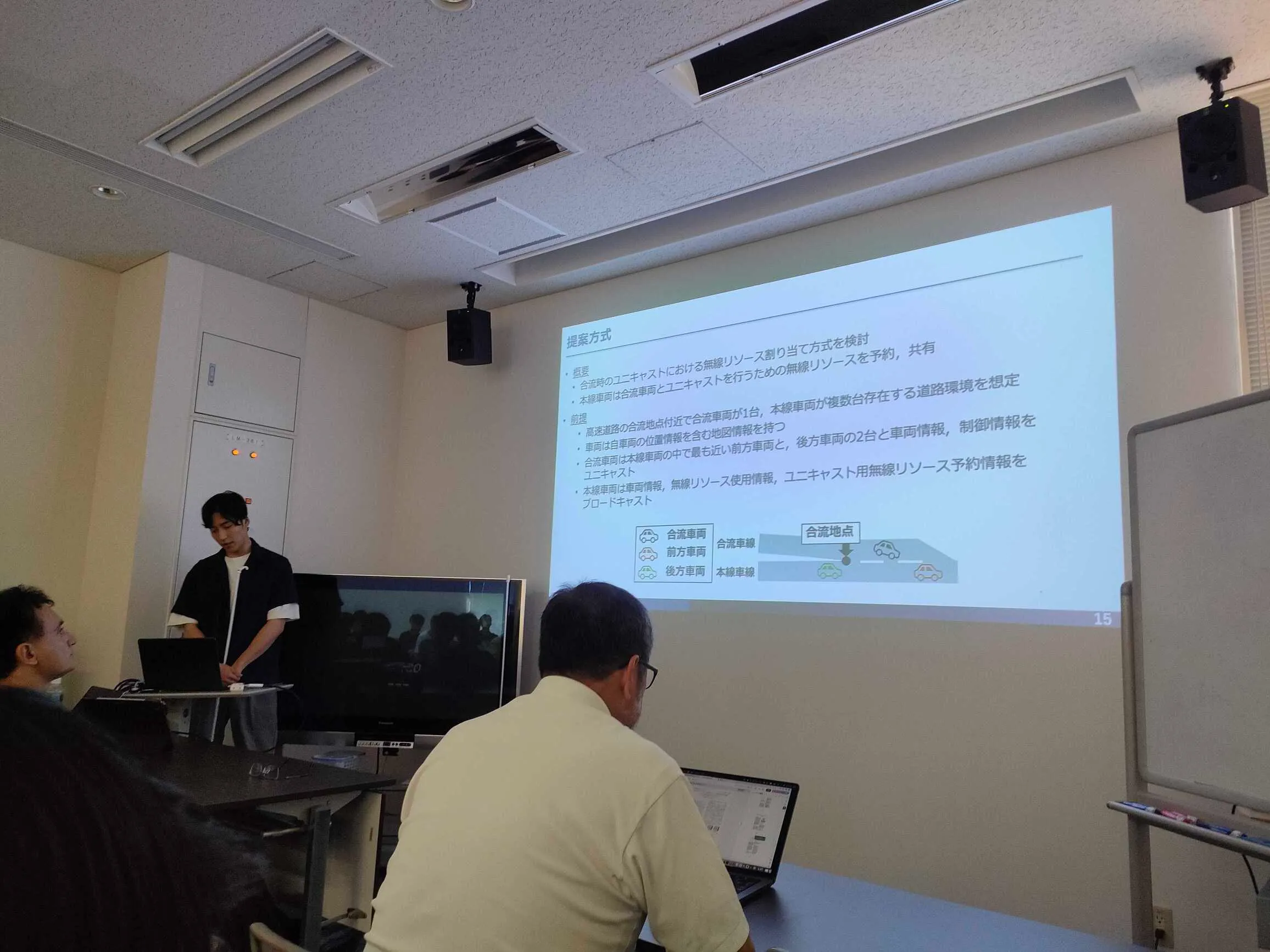
自動運転の高度化に伴い高信頼・低遅延を満たす通信の実現が求められる。そこで車両同士が直接通信を行う車車間通信の研究が盛んに行われている。車車間通信の通信手段として、LTE技術を応用したLTE-V2X PC5や5G技術を応用したNR-V2X PC5がある。両方式はブロードキャストが可能であるが、NR-V2Xではユニキャストが可能である。ユニキャストは受信確認や再送制御が可能であるため、ブロードキャストより高い通信の信頼性が期待できる。車車間通信を行うユースケースとして、高速道路の合流地点付近で、合流車線を走行する合流車両と本線車線を走行する本線車両が協調的に車線変更を行う合流時がある。この合流時では、車線変更を行わない本線車線走行時と比較して高信頼・低遅延な通信要件が求められる。そこで合流時において、合流車両と本線車両が個別に通信できるユニキャストが、高信頼・低遅延な通信要件を満たすために有効であると考えられる。車車間通信において、車両が通信を行うためには、パケットを送信する時間と周波数を表す無線リソースを車両が自律的に割り当てる必要がある。LTE-V2X PC5やNR-V2X PC5の無線リソース割り当て方式としてSPS(Semi-Persistent Scheduling)方式がある。SPS方式の無線リソース割り当て手順では、他車両が使用する無線リソースや受信電力を取得することで、選択可能な無線リソースの中で信頼性の高い無線リソースを選択できる。しかしSPS方式では、通信要件に応じた無線リソース割り当てができない。そのためSPS方式では、ブロードキャスト及びユニキャストに用いる無線リソースは同一の条件で割り当てるため、ユニキャストを行う上で合流時における通信要件を満たさない可能性がある。本研究では、本線車両が合流車両とユニキャストを行うための無線リソースを予約する新たな無線リソース割り当て方式を検討する。この方式により合流時の合流車両と本線車両のユニキャストにおける通信の信頼性向上を目指す。
自然言語と視覚情報を統合したLLM を用いた対話型ドローン操作システムの提案 (徳重 柊人)
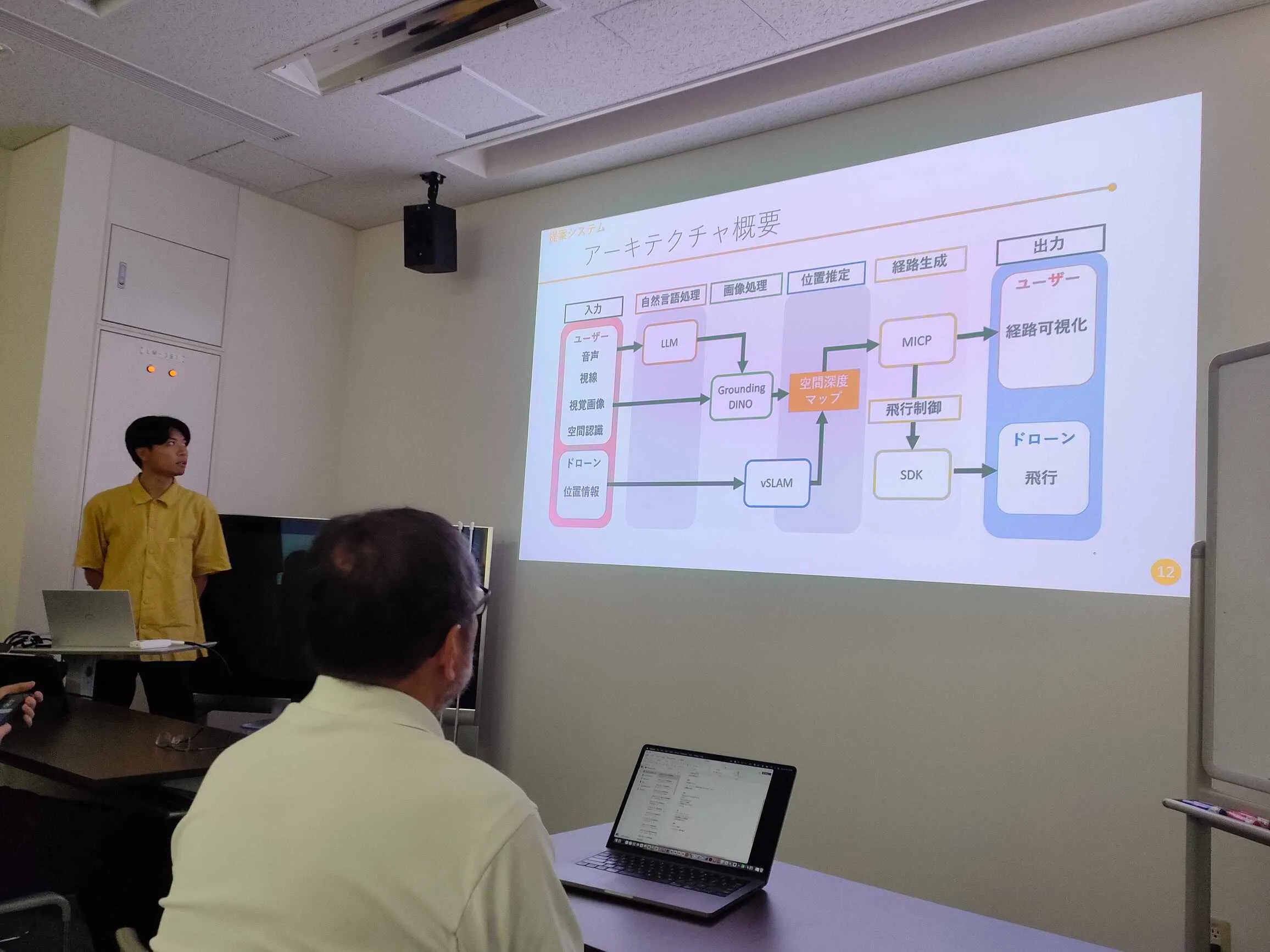
近年、多方面での小型無人ドローン(以下、ドローン)を活用した事業が登場しており、インフラ点検や災害調査など、応用分野を拡大しながら、ドローンの用途は急速に成長し、熟練された操作者に限らず、より多くの人がドローンを使用する機会が増加している。ドローンの操作は主にジョイスティックを用いて行うが、操作に慣れていない非専門家では、技術的な専門知識を必要とし、操作が困難であるという課題がある。そこで、ジョイスティックを用いない、直観的に操作可能なインターフェースの研究が行われている。中でも、LLM(Large Language Model)を用いた自然言語によるドローン操作が、非専門家でも直感的にドローンを扱えることから注目されている。ユーザーは、自然言語の指示を入力すると、LLMが意図を解釈し、ドローン制御のコマンドに変換を通して、ドローンを操作することが出来る。本研究は、ユーザーにおいて直観的なドローン操作システム構築を目的とし、LLMを用いたユーザーの自然言語及び視覚情報から、ユーザーの意図をくみ取りドローンを操作可能なシステムを提案する。
複数物体追跡によるオクルージョン処理及びLiDAR・GPS 統合利用による歩行者特定手法の提案 (富成 泰生)
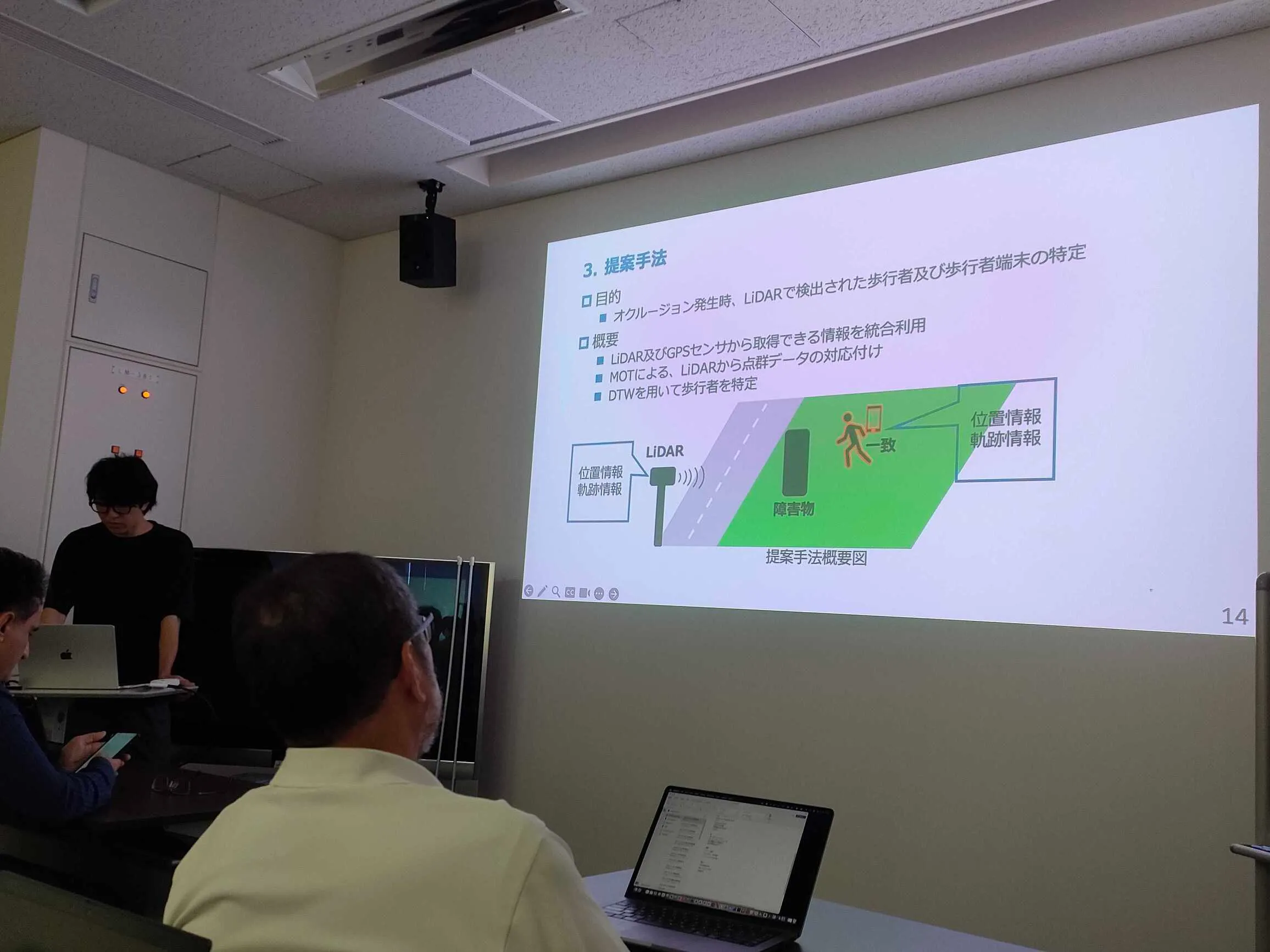
近年、交通事故による死亡者は、歩行中が最も割合が多くなっている。これらの事故を防止するためには衝突事故防止技術のさらなる高度化が求められる。そのため、車両に対して歩行者の存在を通知し、警告を発するシステムの研究が進展しているが、車両だけでなく、歩行者自身にも警告を提供することで、交通事故のさらなる軽減が期待される。この観点から、路側センサやカメラを用いた歩行者特定に関する研究が進展している。しかしながら、歩行者への直接的な警告を提供するには、路側センサが検出した歩行者及び歩行者が所持する端末の特定をする必要がある。また、以降は各歩行者が所持する端末を歩行者端末と表記する。そこで、路側センサであるLiDAR(Light Detection and Ranging)及び、歩行者端末に搭載されているGPS(Global Positioning System)センサの統合利用を行うことにより、LiDARで検出された歩行者及び歩行者端末の特定が可能となる。しかしながら、LiDARは障害物によって視界が遮られるオクルージョンの影響を受けるため、歩行者が障害物に隠れると検出が困難になる。本研究では、障害物によるオクルージョンが発生する状況において、LiDAR及びGPSセンサを統合利用して歩行者を特定する手法を提案する。特に、オクルージョンにより一時的に観測が途切れるLiDARデータに対して、MOT(Multi-Object Tracking)を用いて時間的・空間的整合性に基づき、同一歩行者として対応付けることを目指す。
Reducing Latency in ITS with KCP and Edge Computing with Intelligent Load Balancing Algorithms (奚 浩然)
Internet of Vehicles (IoV) is a new technology for smart city. Connected vehicles can publish data sharing their driving information so that ITS can subscribe these data to provide cooperative services. The characteristic of event-driven architecture is to react to real-time service functions dependent on event trigger mechanism so that it is suitable to build situation-aware traffic applications. Due to the mobility of vehicles and limited bandwidth in wireless communication, data transmission may experience delays and losses. Therefore, it may affect the accuracy and responsiveness of cooperative services in the cloud. Some of the newer ITS systems are event-driven based and they require better handling of network issues. KCP is a low-latency Automatic Repeat-reQuest (ARQ) algorithm in which more reliable communication can be obtained by adding intra-packet FEC. Edge computing is a new computing paradigm that moves computation tasks from cloud to network edges and promises to reduce response latency and save bandwidth usage in wireless network for IoV. In addition, intelligent algorithms can be used to group vehicles, thereby avoiding overload at edge nodes.