2025年8月20日の第170回月例発表会前半において,B4の5名,角田 直仁,立花 泰理,佐野 嵩斗,小野 敬生,鐵野 智也 が発表を行いました.
車載カメラによる物体検出のためのQCNNの適用及び性能向上の提案(角田 直仁)
自動運転技術の進展に伴い,車両の周囲環境を認識する物体検出技術の重要性が高まっている.畳み込みニューラルネットワーク(Convolutional Neural Network:CNN) は物体検出において高い性能を示すが,RGB各チャネルを独立に扱うため,色情報の相関性を十分に活用できない課題がある.この課題を解決する手法として,RGB画像を四元数として統合的に扱う四元数畳み込みニューラルネットワーク(Quaternion Convolutional Neural Network:QCNN) が提案されている.QCNNは色情報の文脈を学習することで性能向上が期待されるが,従来研究では実世界データでの多様な物体検出への応用は十分に検証されていない.本研究では,車載カメラを対象に,多様な物体検出の認識性能の向上を目指す.
複数車両からの警告音発音タイミングと優先制御が歩行者反応に与える影響(立花 泰理)
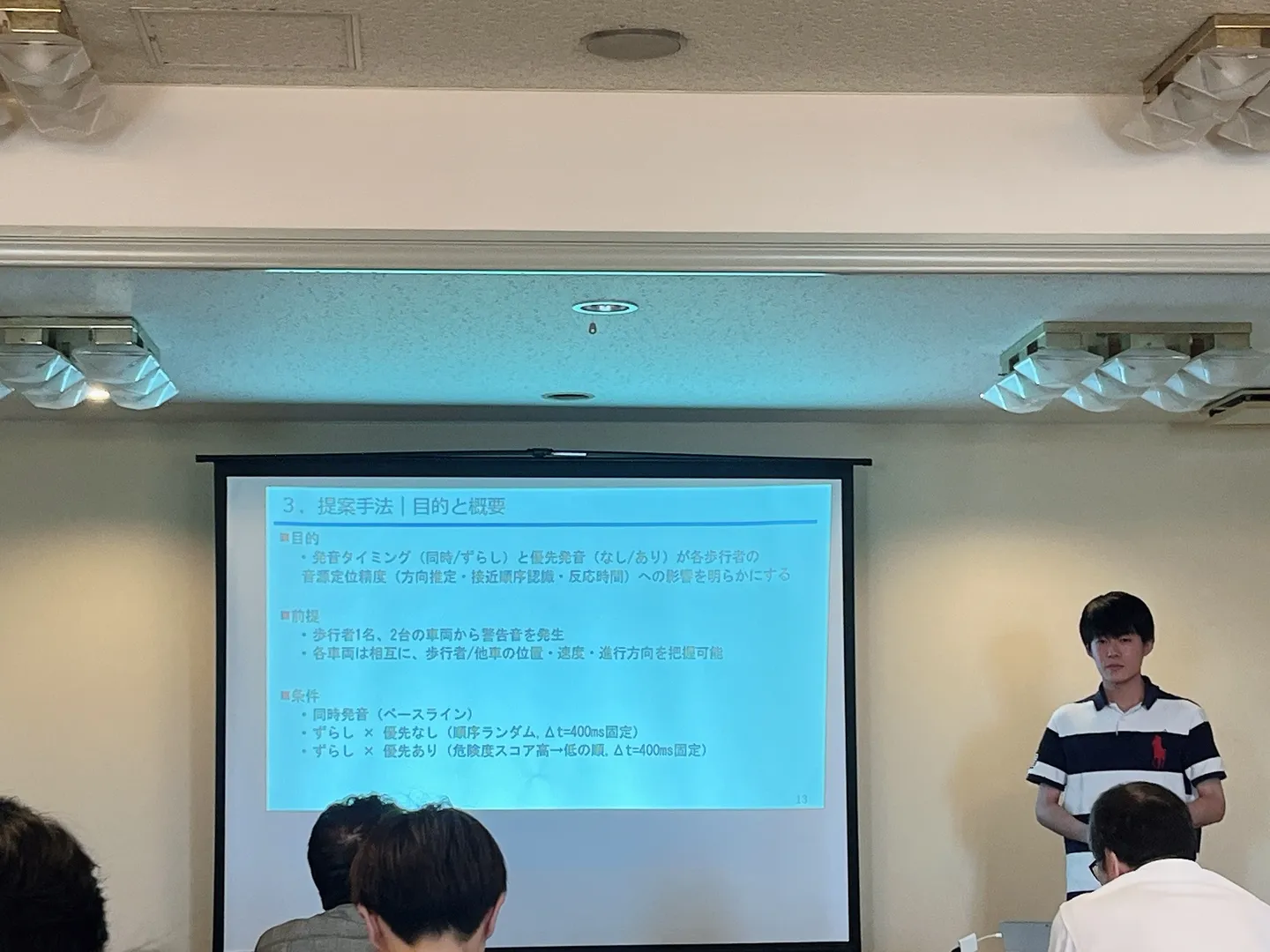
近年, 電気自動車(EV)や電気自動車の普及に伴い,車両の静音性が向上する一方で,歩行者が接近車両を聴覚的に検知しにくくなるという安全面の課題が顕在化している. この問題に対応するため,各国では歩行者への注意喚起を目的として,低速走行時に人工警告音(AVAS:Acoustic Vehicle Alerting System)の搭載を義務化している. しかし,駐車場や交差点などにおいて,複数のEVが同時に接近する場面では各車両が発する警告音が重なり合い,音源方向や接近順序を歩行者が正確に判断することが難しくなる可能性がある. 特に,複数車両が警告音を同時に発する場合,歩行者は音源方向の誤認や反応行動に遅延が発生し,横断安全性を損なうリスクがある.逆に,発音タイミングを適切に制御できれば,歩行者の注意を効果的に誘導し,安全性向上に寄与できる可能性がある.発音タイミングの制御として優先制御がある.優先制御とは,複数の車両が接近する状況で,歩行者にとってより危険度の高い車両の警告音を先に提示する仕組みであり,最も注意すべき車両を迅速に認識させることを目的としている.しかし,最適な警告音の発音タイミングや優先制御は,交通状況や危険度,歩行者の認知特性によって異なり,一律に設定することは困難である. そこで本研究では,複数EVが接近する状況を仮想現実(VR:Virtual Reality)空間で再現し,発音タイミング(同時/時間差)と優先制御(なし/あり)が歩行者の音源定位精度や反応行動に与える影響を定量的・定性的に評価する. また,複数車両環境における効果的な警告音設計の指針を提示する.
BLE指紋法における統計的特徴を用いた位置推定精度向上手法(佐野 嵩斗)
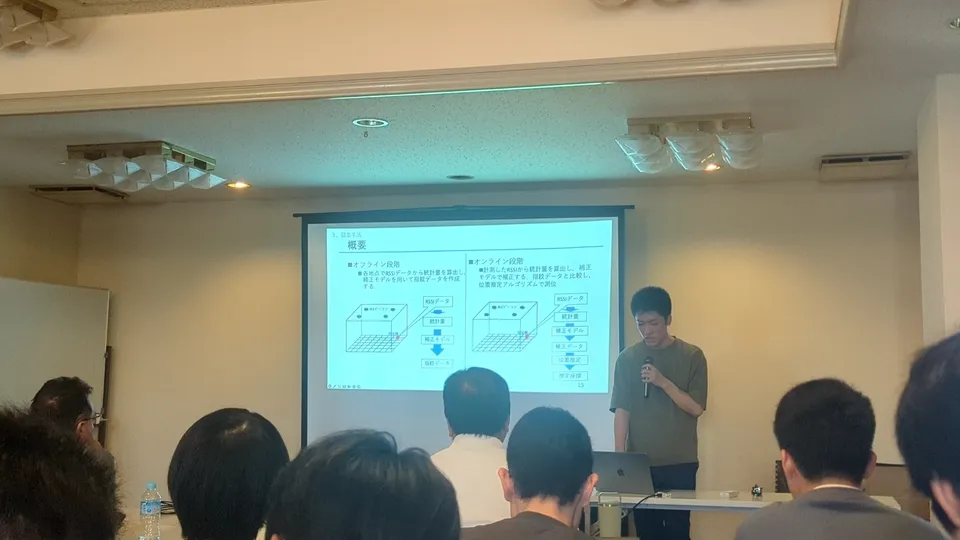
近年,屋内での人やモノの位置情報を把握する技術の関心が高まっており,物流支援や施設内案内など様々な応用が期待されている.特にBluetooth Low Energy (BLE) を用いた屋内測位は,低コスト,低消費電力,NLOS(Non Line-Of-Sight)伝送という特徴から注目を集めている.BLE を用いた位置推定では,受信電力強度(RSSI:Received Signal Strength Indicator)を用いたものが多く検討されている.理想的な環境におけるRSSIは,距離とRSSIの関係を表す代表的なモデルであるLNSM(LogNormal Shadowing Model)に従って BLE ビーコンからの距離が離れるにつれて減衰する.この関係によってRSSIから受信機の位置を推定することが可能である.一方,実環境では,電波の反射や干渉が起こるため,RSSIは必ずしもLNSMに従うとは限らない.そこで,指紋法が有効な手法として挙げられる.指紋法は2つの段階に分けられる.オフライン段階では,屋内の各位置でRSSIを事前収集して指紋データを作成する.オンライン段階では測定したRSSIと指紋データを比較し,位置を推定する.しかし,RSSIは同じ位置にいても変動し続けるため,取得したRSSI データをそのまま利用して精度の高い指紋データを作成することは難しい.特に,室内の壁際や角付近では電波の反射の影響が強く,RSSIの変動が大きい.そこで本研究では,RSSIの揺らぎや変動の特徴を平均や分散など統計的に捉え,統計量をBPNN(Back-Propagation Neural Network)に入力して補正モデルを学習することで,実環境の特徴を反映した指紋データを作成する.これにより,BLE指紋法を用いた位置推定の精度向上を目指す.
TCP/QUICにおける複数の輻輳制御アルゴリズムに対するLDDoS攻撃耐性(小野 敬生)
インターネットサービスの発展に伴い,通信プロトコルの脆弱性をついた攻撃も巧妙化している.近年では,DoS攻撃の一種としてLDoS(Low-rate Denial of Service)攻撃とその分散型(Distributed)のLDDoS攻撃が重要なセキュリティ課題として議論されている.図1に,LDDoS攻撃の仕組みとその影響を模式的に示す.Shrew手法に代表されるLDoS攻撃は,通信プロトコルの再送制御アルゴリズムの規則性を狙ったパルス形状のトラフィックをサーバへ送信するため,平均攻撃レートを抑えて従来のDoS攻撃の検知機構に妨害されにくい特性を持つ.この攻撃手法はTCPのRTO(Retransmission Timeout)の規則性を悪用するため,RTOに類似する機構を有する通信プロトコルに対しても攻撃の対象となる可能性が高い.IETFによって2021年に標準化されたトランスポートプロトコルのQUICは,高速な接続確立やセキュリティ向上などの利点から,急速に普及が進んでいる.現在,QUICは全Webサイトの40%以上で使用されており,ChatGPT,Gmail,YouTubeなどでも採用されている.QUICは,RTOに類似したPTO(Probe Timeout)によってパケットの再送を決定しているため,QUICに対してLDDoS攻撃が有効であるならば脅威となりうる.しかし,QUICには遅延時間ベースやパケットロスベースなど多種多様な輻輳制御アルゴリズムが搭載されており,各アルゴリズムは攻撃に対して異なる応答を示す可能性がある.そこで本研究では,LDDoS攻撃への対策に貢献するため,NewReno,CUBIC,BBRといった主要な輻輳制御アルゴリズムを実装したTCP,QUICに対してLDDoS攻撃を行い,各アルゴリズムがどの程度の攻撃耐性を持つかを検証する.本稿では,ネットワークシミュレータにns-3を使用し,攻撃シナリオにおけるスループット低下率から攻撃耐性を評価する.
RSSIを用いたビーコン通信範囲内におけるなりすまし攻撃検出手法の提案(鐵野 智也)
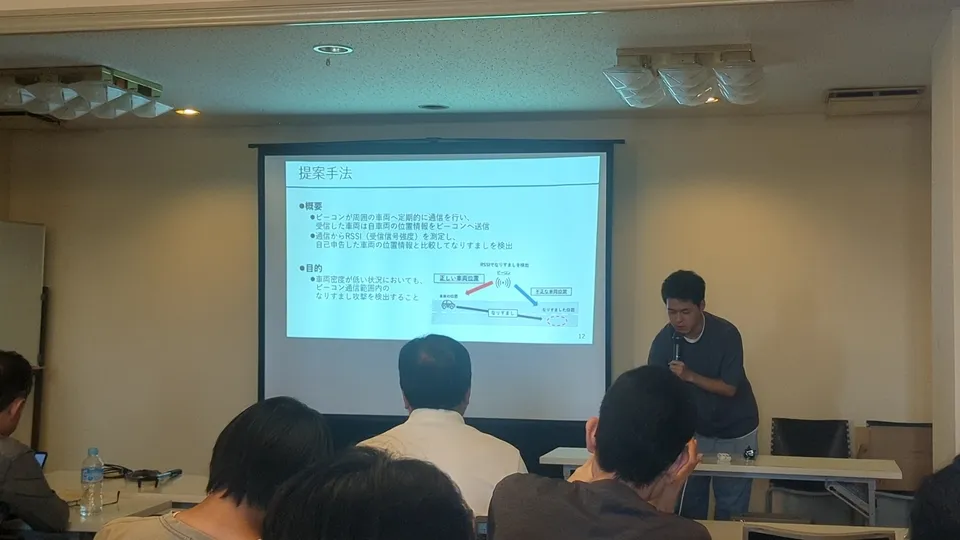
近年,ITS(Intelligent Transport Systems)分野では,車両同士や車両とインフラとの無線通信を通じて,交通事故防止や渋滞緩和などを目的とした研究が活発に進められている.その中で,クラウドを利用した安全運転支援サービスがあり,大量の交通データを効率的に収集および分析し,リアルタイムに運転支援情報を提供できるという利点から注目を浴びている.一方で,不正なデータ転送などの攻撃によって誤った情報が配信され,その情報を基にシステムが判断を下すことで,事故の誘発や交通渋滞の悪化といった事態を招く.攻撃の1つとして,車両が虚偽の位置情報を送信するなりすまし攻撃が問題となっており,システムの安全性を脅かす要因となっている.車両がなりすましを行うことで,交通データの信頼性が低下し,車両同士で連携が取れず渋滞や交通事故に繋がる.よって,なりすまし攻撃は安全運転支援サービスにとって脅威であり,対策が必要である.なりすまし攻撃の検出手法として,既存研究では複数車両による相互監視に基づいて,なりすましを検出するアプローチが用いられている.しかし,周囲に車両が存在しない車両密度が低い状況では,相互監視が成立せず攻撃検出が困難であるという課題がある.そのため,車両密度が低い単独車両でも攻撃を検出できる軽量な手法の確立が求められている.本研究の目的は,車両密度が低い状況においてもなりすまし攻撃を検出することである.そのために,ビーコン通信範囲内で車両が送信する位置情報と,それに対応するRSSI(Received Signal Strength Indicator)を取得し,両者の整合性を確認する手法を提案する.