2022年6月11日の第138回月例発表会(M2)において,竹内 一真(M2),池田 仁(M2),杉本 涼輔(M2),山本 浩太郎(M2),塚崎 拓真(M2),の5名が以下のタイトルで発表を行いました.
狭小空間監視のための複数ドローンを利用した動的な 3 次元環境地図生成による AR 可視化手法(竹内 一真)
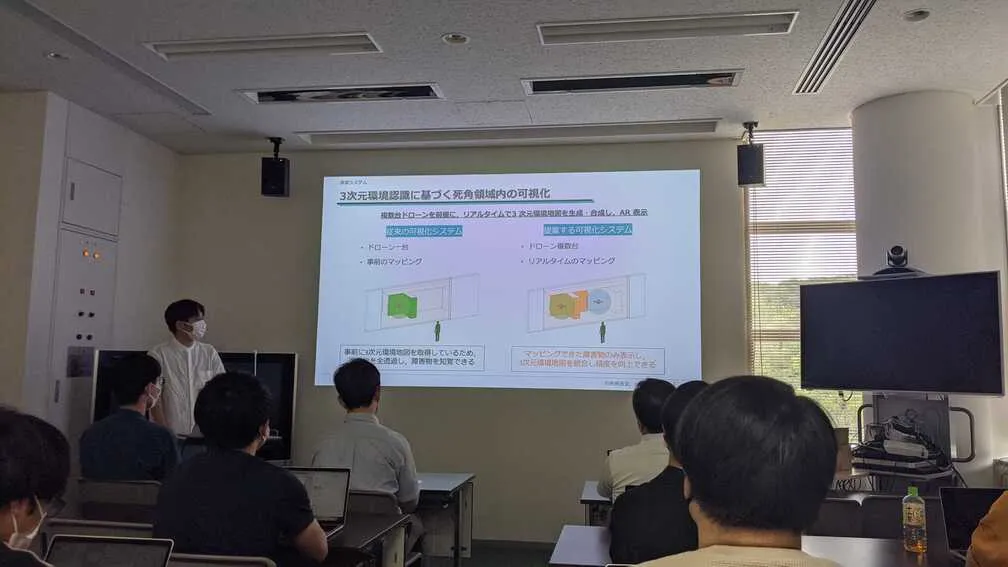
近年,多方面でのドローンを活用した事業が進出しており,インフラ点検や災害調査など,応用分野を拡大しながら,世界のドローン市場は急速に成長している.中でも小型ドローンの特徴である機体の大きさを活かして,人間が入れないような狭い空間での活躍の場も増加している.しかし,狭小空間でのドローン飛行は遮蔽物が多く,操縦者は遮られた視点からの操縦を必要とする.そのため,死角領域内のドローン操縦では,ドローンを視認できない中,衝突することなく,安全に操縦する技術が求められる.オンボードカメラ搭載ドローンを使用する場合では,操縦者は,ドローンから送られる空撮した映像を元に操縦が可能となる.しかし,カメラが前方しか写さないことにより,前方以外の死角が多くなり,状況認識が不十分となるため,狭小空間のように狭く,障害物が多いような環境では,操縦は困難である.小型ドローンでは,センサ搭載制限があるため,障害物回避の支援がないことが多く,衝突の危険性があり,また,障害物回避の機能を搭載していても,狭小空間では障害物回避が行えない場面が多く存在する.そこで,Augmented Reality(AR)を用いて死角領域内を可視化することにより,狭小空間におけるドローンの操縦性向上や安全性向上が期待されている.事前に走行環境をマッピングすることで3次元環境地図を取得し,空間認識を提供している.しかし,狭小空間のドローン操縦において,事前に3次元環境地図を用意することは困難なため,走行環境を探索する中で,リアルタイムにマッピングを行う必要がある.その上,一台のドローンだけではマッピング範囲が狭く,未知の走行環境を見通せない.また,複数ドローンが混在する場合も問題である.各ドローンがマッピングした3次元環境地図が異なり,各操縦者が視認している環境が異なるため,作成した3次元環境地図を統一し,精度を向上する必要がある.本研究では,狭小空間による死角領域内の複数ドローン飛行の危険性を軽減するため,リアルタイムに3次元環境地図を作成,合成し,ARにより操縦者の死角領域内を可視化するシステムを開発する.
自動運転におけるセンサ情報の冗長性軽減アルゴリズムの提案(池田 仁)
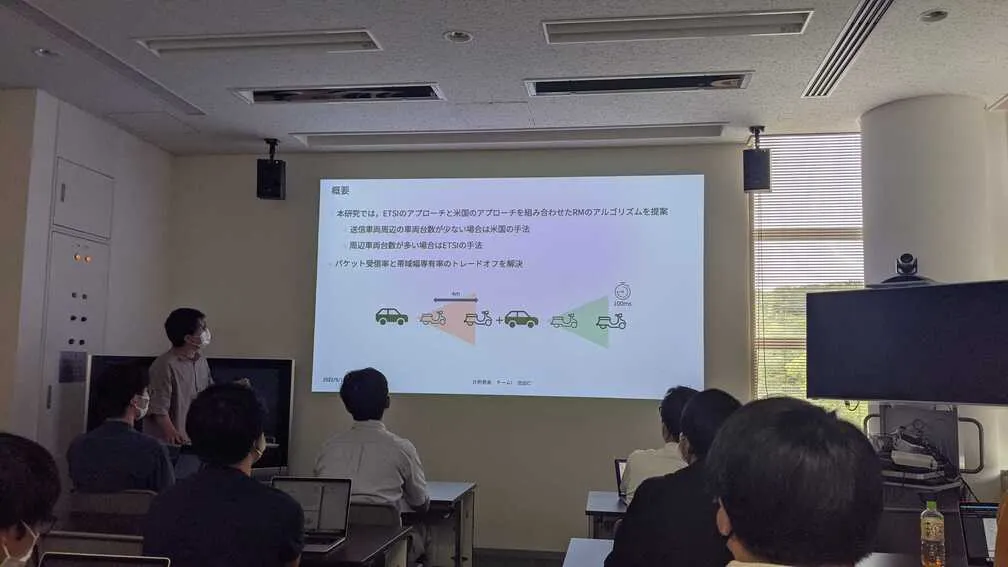
近年,CPS(Collective Perception System)が,CAV(Connected Automated Vehicles)の限られた視野を拡張する新しい技術として注目されている.V2X(Vehicle-2-x)技術と組み合わせることで,CAVは定期的に車載センサから得られた情報を共有することができる.車載センサから得られた情報を定期的に共有することで,交通管理当局や他の車は,これらの情報から多大な恩恵を受けることができる.一方で,CPSを利用することの問題点も存在する.それは,車両台数が多い中でのCPSの利用は冗長なデータ送信によりネットワークに大きな負荷がかかる可能性があるというものである.というのも,同じ物標が複数のCAVの視認可能な範囲にある場合,同じ物標のデータを複数回共有してしまうことになり,少ないリソースを無駄にしてしまうからである.それを解決するための技術として,RM(Redundancy Mitigation)という技術の研究が進められている.現在,RMは追跡したオブジェクトと他のCAVから受信したセンサ情報と比較し、一定期間共有されていないものだけをブロードキャストするという手法が考えられている.しかし,この方法は,特に,周辺車両台数が多く,通信量が多い場合,パケット受信率が低下し,交通状況を把握しきれないという問題点がある.本論文では、都市部,郊外,高速道路におけるデータ冗長性の問題を検討し、冗長な通信がネットワークリソースに大きな負荷を与えることを示し,ネットワークリソースの消費を抑え,交通状況を把握し安全性を確保するRMのアルゴリズムを提案する.
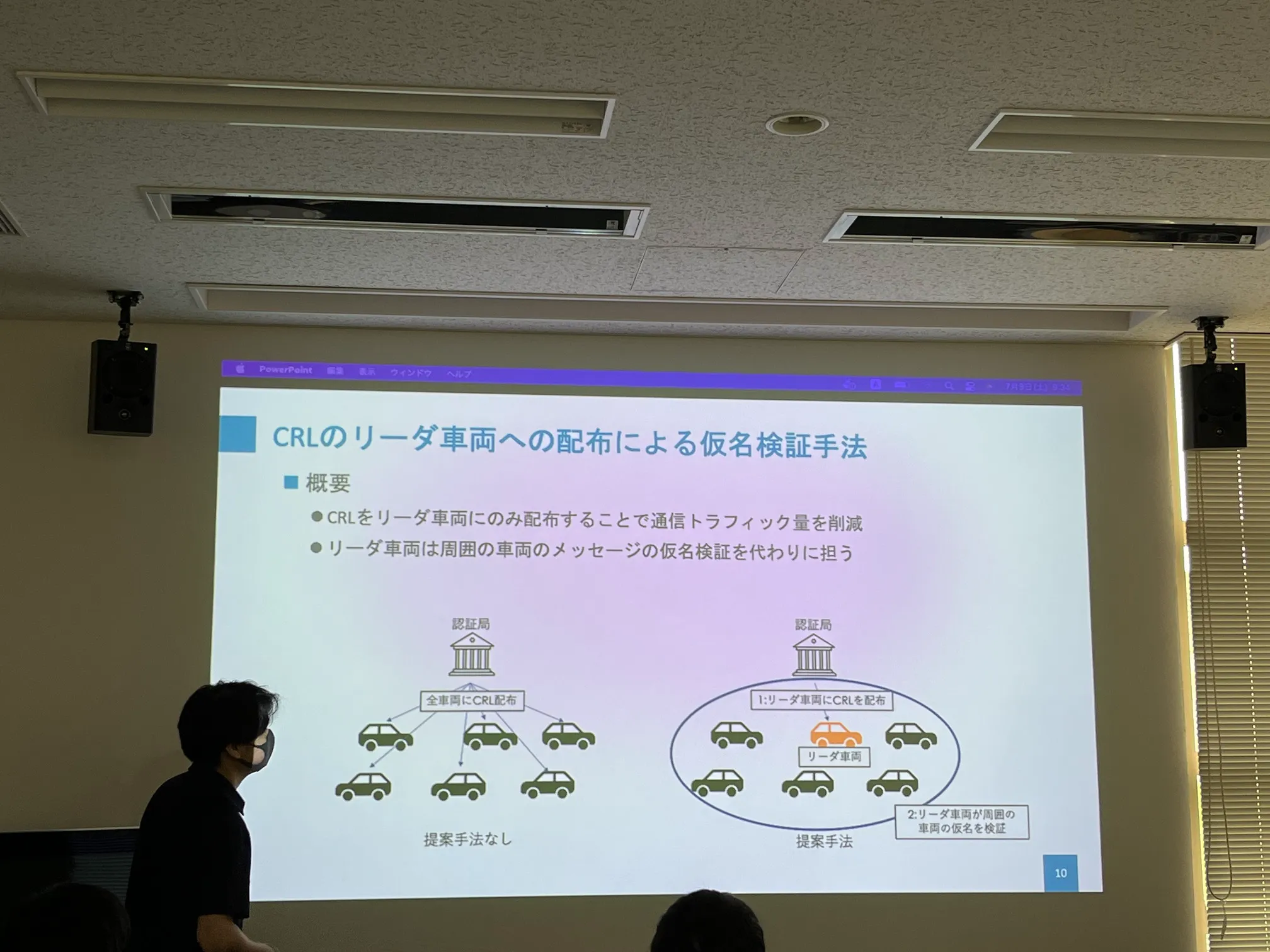
V2X 通信における仮想車両を用いた仮名交換方式の提案(杉本 涼輔)
近年,車両とあらゆるものを通信で繋ぐV2X(Vehicle to Everything)通信に関する研究が盛んに行われている. 中でも自車両の位置情報や速度情報等を周囲にブロードキャストし,共有する安全メッセージは車両の事故防止や渋滞の削減につながることが期待されている. しかし安全メッセージは自車両の位置情報や識別子を平文でブロードキャストするため,プライバシの保護が問題とされている.この問題を解決するためにETSI(European Telecommunications Standards Institute)は仮名と呼ばれるものを用いる手法を標準化している. 仮名とは,通信に含まれる位置情報等から車両を追跡されることを防ぐためにV2X通信機器に割り当てられ,実際の識別子の代わりに通信に用いられる仮の識別子のことである. 本研究では周辺の車両台数に応じて擬似的に仮想車両を生成し,それらを含めて協調的にに仮名を交換することで攻撃者の位置情報追跡を困難にし,周囲の車両台数に関わらず高いプライバシを確保する手法を提案する.
ダイナミックマップの時空間グリッド予約を利用した自動バレー駐車制御方式(山本 浩太郎)
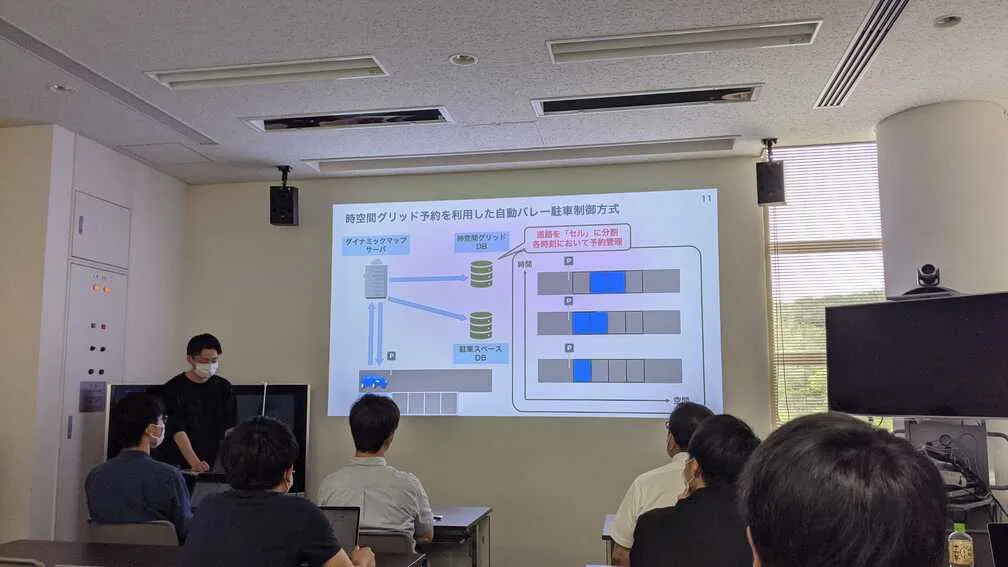
近年,自動運転技術により搭乗者の乗降場所から駐車場内の駐車スペースに車両を自動で駐車し,また,必要な時に駐車スペースから乗降場所まで自動で車両を呼び出すことができる自動バレー駐車の研究・開発が行われている.複数の車両が駐車場内を効率よく移動する際には,各車両間で走行を調停する必要がある.車両の走行調停については,車両のセンサや制御機能に依存する方式がある.しかし,車両に搭載されたセンサで得られる情報は限定的であるため,駐車場内を安全に走行するためには各車両の車間距離を大きくする必要がある.各車両の車間距離が大きくなると,複数の車両が駐車場内を効率よく移動することが困難となり,利用者の待ち時間の増加や駐車場の経営効率の悪化に繫がる.そこで,車両の走行調停手法としてダイナミックマップの時空間グリッド予約が先行研究で検討されている.先行研究では,この基仕組みを単一交差点や道路合流部を想定して構築し,旅行時間について考察が行われ,信号機を用いて調停する場合や車両に搭載されたセンサのみで調停する場合と比較し,旅行時間を削減することを示した.本研究では,駐車場内の複数の車両の移動を効率化するために,ダイナミックマップの時空間グリッド予約を利用した自動バレー駐車制御方式を提案する.
IoT デバイスの通信セキュリティ向上のためのホームネットワーク仮想化フレームワークの提案(塚崎 拓真)

近年,IoT(Internet of Things)の可能性が注目され,今後あらゆるモノがネットワークに接続され,利用されることが予想される.しかし,IoTの発展により利便性が高まる一方で,従来ネットワークに接続されていなかったモノが接続されることにより,セキュリティ上のリスクも高まっている.IoTデバイスは,十分なセキュリティを考慮せずに開発されたものが多く,脆弱なパスワードによる侵入やプライバシー保護の不十分さ等のセキュリティ対策不足が顕著である.そのため,悪意のある攻撃者によるサイバー攻撃の標的になりやすい.また,今後はホームネットワーク内で閉じたデバイス間の通信によって連携を行う形になることが想定され,各デバイスにおいてアクセス制御等の更なるセキュリティ対策を行う必要がある.そこで本研究では,コンテナ上にセキュリティ対策を施したProxyを作成し,IoTデバイスに対して,仮想的にセキュリティ対策を適用するシステムを提案する.また,SDN(Software Defined Networks)の代表的プロトコルであるOpenFlowを用いて,ホームネットワーク内の通信を監視するフレームワークの構築も検討する.