2022年5月14日の第137回月例発表会(B4)において,谷澤 直大(B4),坂本 拓馬(B4),森田 暉之(B4),山崎 慎也(B4),佐々倉 瑛一(B4),松村 学(B4),松下 翔太(B4),東田 悠希(B4)の8名が以下のタイトルで発表を行いました.
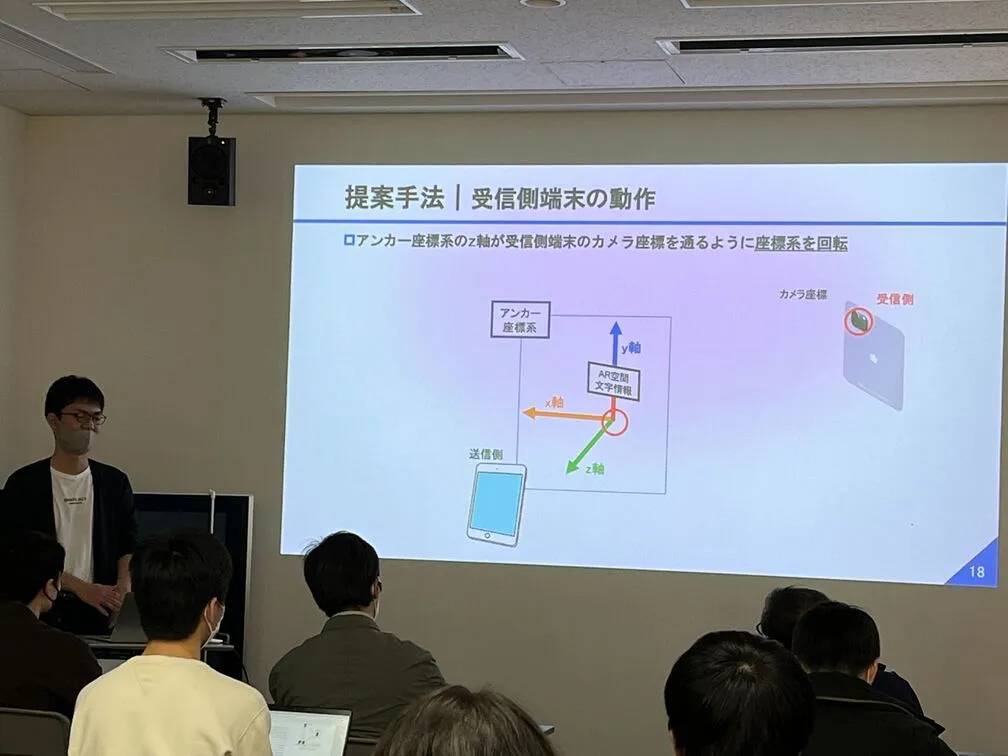
エッジコンピューティングを用いた動的な情報のAR高速表示手法(谷澤 直大)
近年,現実空間に仮想空間の情報を重畳させて表示するAR(Augmented Reality)が,様々な場面で利用されている.例えば,「PokémonGO」などのモバイルアプリや「Snapchat」や「TikTok」のようなSNSアプリでの使用が広がってきた.また,IoT(InternetofThings)の普及によって,膨大な数のデバイスがインターネットに繋がっており,それらを場面に合わせて利用することにより,私たちの生活はより豊かになった.
IoTの利用はますます広まっているが,それに関わる大量のデータを集中型処理であるクラウドコンピューティングで一元管理しているため,送受信にかかるクラウドへの負荷は多大なものとなっている.そのため,サーバ処理性能が圧迫されてしまい,数百ミリ秒から数秒のタイムラグが起こってしまう.また,ARでもクラウドコンピューティングが用いられている.これにより,複数のデバイスで同じARスペースを共有することが可能となり,複数のユーザと情報を楽しむことが可能となる.しかし,ARはカメラ画像と仮想情報の画像データを扱っていることから,AR情報を求めてクラウドに膨大なデバイスからのアクセスがあることや,大量のAR情報が収集されることによって,クラウドの負荷が増大してしまう.
そこで本研究では,エッジコンピューティングを用いて処理を分散させることで,クラウドへの負荷を軽減し,結果的に動的な情報のARでも高速に表示することが可能かを検証する.ここで,動的な情報とは,対象物の移動や変化によって情報が更新されるもののことをいう.情報が更新されることによって,トラフィック量が増大してしまうため,静的な情報よりも遅延が発生しやすくなる.本研究では,エッジコンピューティングを用いることで,クラウドにかかるトラフィック量の削減とスループットの向上を図る.
HTIPを用いたホームネットワークの障害検知通知システム(坂本 拓馬)
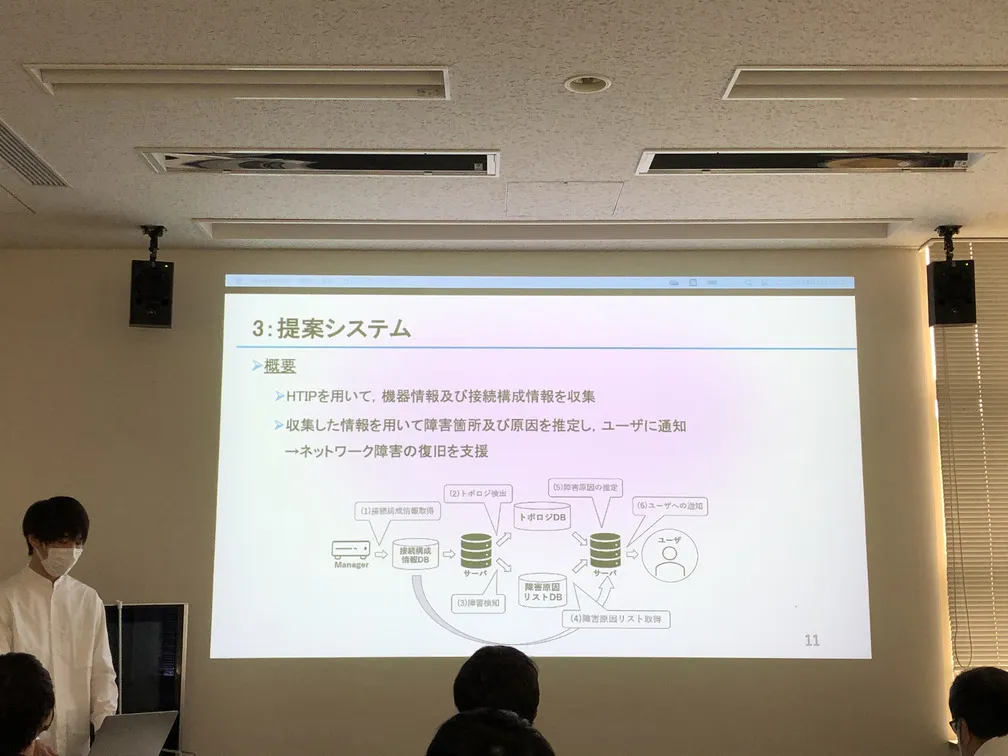
現在,パソコン,テレビ,ゲーム機,プリンタ,家電など様々なサービスを提供する機器がホームネットワークに接続されている.また,スイッチやルータなどの中間装置や端末機器は従来のUTP(Unshielded Twisted Pair)ケーブルを用いた有線接続のみではなく,無線や家の大きさによってはPLC(Power Line Communication)などを用いてホームネットワークに接続されており,ネットワーク知識が乏しいユーザにとっては構成が複雑になっている.そのため,障害が発生した際に,ネットワーク知識の乏しいユーザは障害の発生箇所や障害が発生した原因を特定することは困難であり,サポートセンターに連絡をする場合,状況を適切に伝えることができない.しかし,ネットワークを障害から復旧させるためには,障害の発生箇所や障害が発生した原因を特定する必要がある.そこで,ユーザが障害の発生箇所や障害が発生した原因を特定することを支援するためにHTIP(Home-network Topology Identifying Protocol)を用いてホームネットワークにおける機器情報,接続構成情報を収集し,それをもとにトポロジを検出するシステムが提案されている.HTIPとは,ホームネットワーク内の末端の端末(以下,エンド端末)及びネットワーク機器の接続構成情報や機器情報を収集するプロトコルである.これらの情報の収集は,UPnPControllerDevice機能,LLDP(Link Layer Discovery Protocol)を用いてネットワーク内のエンド端末,ネットワーク機器の中から選択された1つの機器上で動作するManagerに情報を通知することで行なわれる.しかし,このシステムはトポロジの検出を行い,ネットワーク構成を可視化をすることに焦点を当てており,障害を検知し,ユーザに障害の発生箇所や障害が発生した原因の通知を行うことは考慮していない.また,大規模なネットワークにおいては障害を検知し,障害の発生箇所や障害が発生した原因を通知するシステムが存在するが,ホームネットワーク向けのネットワーク機器は性能上対応していないことがある.
そこで本研究では,HTIPを用いて収集した接続構成情報から定期的にトポロジ検出を行い,障害を検知した際にユーザに対して障害の発生箇所及び推定した障害の原因を通知することで,ネットワークの障害復旧を支援するシステムを提案する.
アクセスポイントのセル内における予測離脱時刻を考慮したMPQUICフロー制御の提案(森田 暉之)
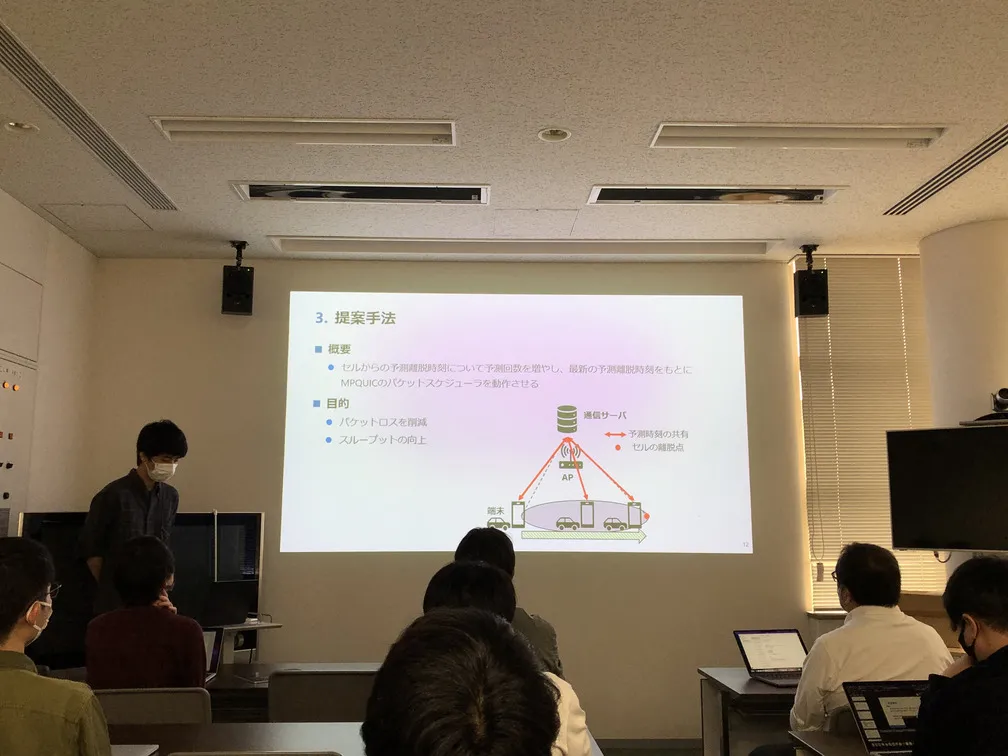
スマートフォンの普及や大容量コンテンツの増加により,移動通信のトラフィックが増加している.そこで,トラフィックを分散させるために,マクロセル内にピコセルを重畳させるヘテロジニアスネットワークが対策として挙げられる.図1のようなヘテロジニアスネットワークに対して,MPTCP(Multi-PathTCP)やMPQUIC(Multi-PathQUIC)といったマルチパストランスポートプロトコルが有効である.これは,マクロセルのLTEやピコセルの無線LANを併用することで,帯域幅を広げるだけでなく,異なるネットワークを効率的に併用しながら,特定の基地局に集中する通信容量の緩和が可能だからである.このプロトコルにより,ユーザ端末は異なるネットワークを併用でき,ネットワークの各経路に対してパケットスケジューラでフロー制御される.
しかし,従来のマルチパストランスポートプロトコルのパケットスケジューラであるlowest-RTTFirstは低遅延な経路を優先する方式である.そのため,ユーザ端末の移動を想定すると,無線LANを利用中のユーザ端末が無線通信の範囲外に動いた場合,該当経路でスケジュールされていたパケットが到達しないという問題がある.無線通信が切断された場合,確認応答が届かず,ロス検出も機能しないため,このパケットロスに伴う遅延時間は大きくなる.また,サーバはユーザ端末に対して,到達しないパケットを送り続けるため効率が悪い.つまり,ユーザ端末が頻繁に無線通信を切り替える環境において,経路の急激な変化に対応できるパケットスケジューラが必要である.
そのため本研究では,MPQUICにおいて,移動に伴うセルからの予測離脱時刻をもとにフロー制御を改善し,その有効性を示す.
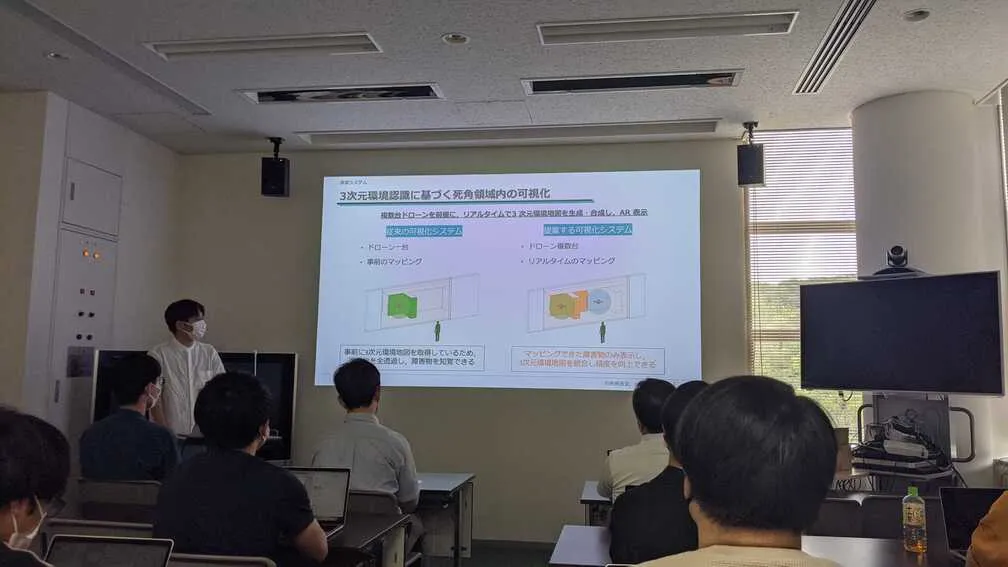
CAV のセンサ検知範囲の重複度に応じた送信間隔割り当て手法(山崎 慎也)
近年,自動運転技術に関する研究が盛んに行われている.2020年11月に,世界で初めて日本は自動運転レベル3の型式指定を実施し,車線維持機能に限定して,高速道路等において60km/h以下の渋滞時等における作動を実現している.日本政府は2025年を目処に自動運転レベル4の実現に向けて高速道路での60km/h以上の自動運転機能の安全基準等の策定を政府目標としている.また,レーザー光を用いて物体までの距離や形状を計測するLiDARやカメラ等の多数のセンサを搭載した協調型自動運転車両(CAV)の研究も注目されている.CAVは常に周辺環境を検知し,そのデータを基に他車両や静的な高精度3次元データに動的な交通情報を集約したダイナミックマップを管理するクラウドとリアルタイムで通信することで,より安全で効率的な道路交通を実現することが期待されている.
しかしながら,多数のCAVの通信による通信帯域の逼迫が懸念されており,動的に変化する道路環境において通信や処理の遅延は事故に繋がると考えられる.従って,通信頻度や通信するデータ量を抑える必要がある.
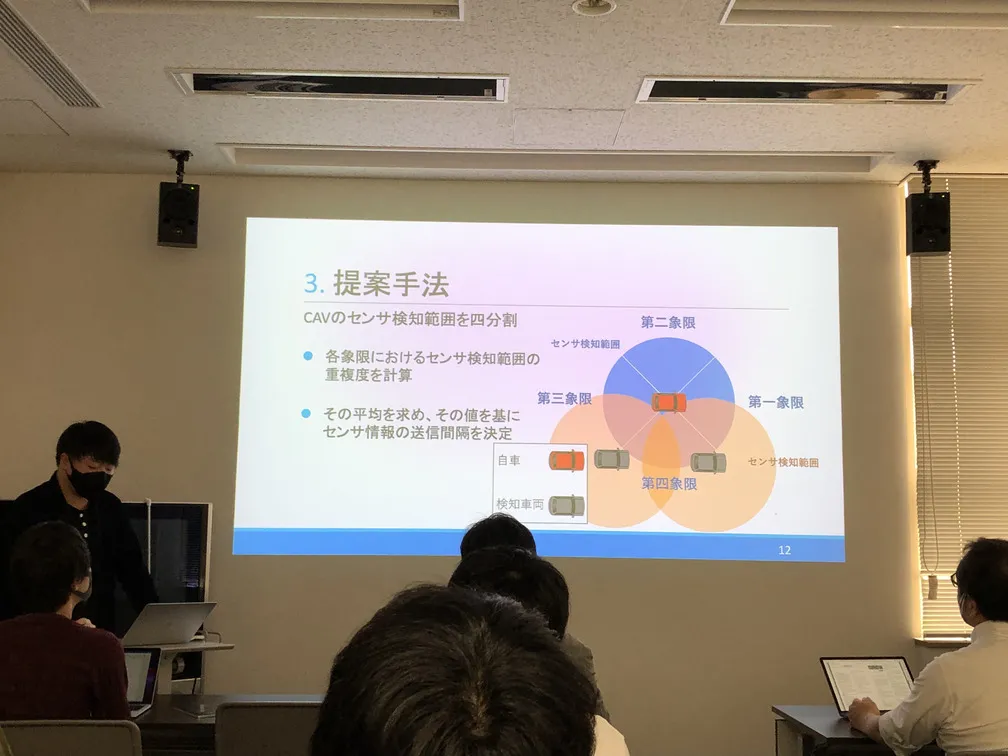
本研究では,このようなCAVの通信帯域の逼迫を解決するために,CAVのセンサ検知範囲の重複度に応じて冗長性が高いセンサ情報の送信頻度を下げることで動的な送信間隔割り当て手法を提案し,シミュレーションで評価する.
LiDAR SLAMにおける画像特徴抽出とICPを利用した精度向上(佐々倉 瑛一)
近年,LiDAR SLAM(Light Detection And Ranging Simultaneous Localization and Mapping)による自己位置推定技術が注目されている.LiDARはレーザー光を使用して物体までの距離や位置を計測する技術で,物体の位置や形状を点群で取得する.LiDARSLAMではLiDARで現実世界をスキャンし,取得した点群のマッチングにより自己位置推定を行う.また,LiDARセンサは小型化,軽量化及び低価格化が進んでおり,スマートフォンやタブレット(以下,端末)にも搭載されるようになったため,今後端末でもLiDARSLAMを使ったアプリケーションやシステムを利用できるようになる.LiDARSLAMにおける点群マッチングにはICP(Iterative Closest Point)アルゴリズムやNDT(Normal Distributions Transform)アルゴリズムなどが存在するが,ICPとNDTは精度と処理速度においてトレードオフの関係にある.ICPには,NDTに比べ高精度である代わりに点群の量が増えると処理に時間がかかるという問題があり,これを踏まえて現在ではリアルタイム性が求められる場面においてはNDTが使用されているが,NDTには,処理が高速である代わりに精度があまり良くないという問題がある.
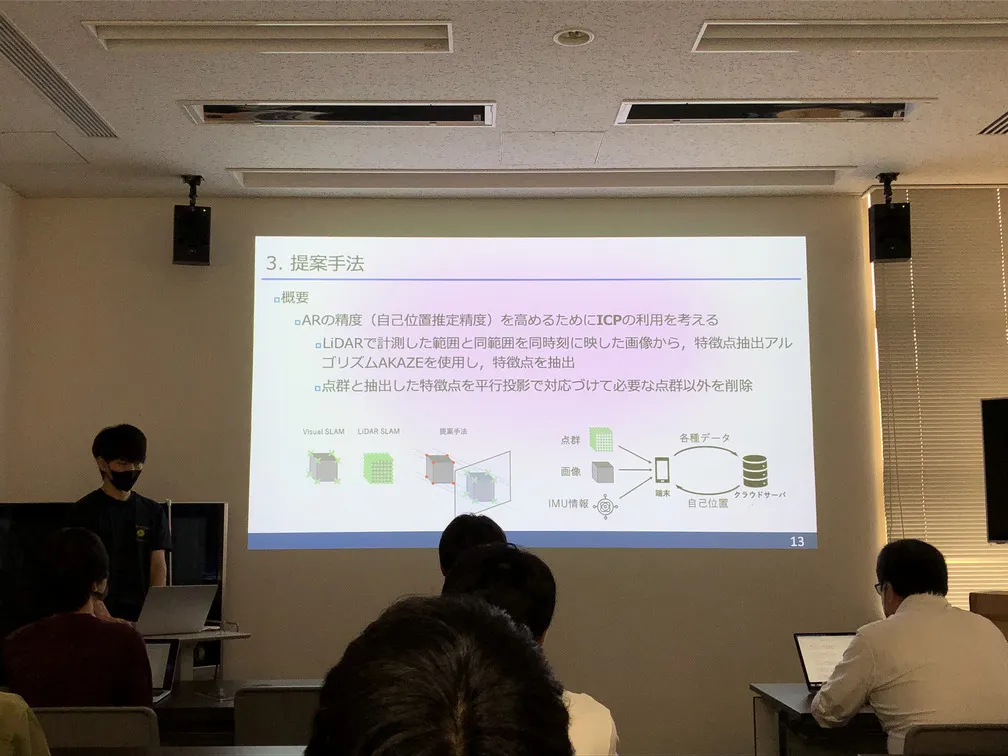
そこで本研究では,端末の自己位置推定をする際に,ICPを使ったマッチングにおいてLiDARで取得した点群全てを使用せず,必要な特徴点の点群のみを使用する手法を提案することで,処理時間を実用的な範囲に抑えつつ,NDTを使用した場合よりも高精度な自己位置推定手法を検討する.
時空間グリッド予約を実現するマイクロロードプライシングのオークション方式による価格設定手法の提案(松村 学)
近年,工事情報や渋滞情報などの動的情報と高精度3次元位置情報(路面情報,車線情報)等の静的情報を組み合わせたデジタル地図であるダイナミックマップの研究が進められている.この技術を用いることで,自動運転車が走行予定である経路の時間と空間を事前に予約し,他の車両を排除することでよりスムーズな走行を可能にする時空間グリッドという考え方が確立された.今後ダイナミックマップの活用により,協調型自動運転車両の普及につれて安全運転支援や渋滞緩和などの役割を果たすと期待されている.
また,ロードプライシングという考えのもと,時空間によって分割したグリッドそれぞれに値段を付け,その時空間グリッドを走行するための予約に料金を必要とするマイクロロードプライシングの実現を目指す研究も行われている.このマイクロロードプライシングでは,車両のスムーズな走行が可能となる一方で,事前予約の優先度がない場合や価格設定によっては,車両の予約が集中する問題が生じ,一部車両の旅行時間の増大が問題点となる.
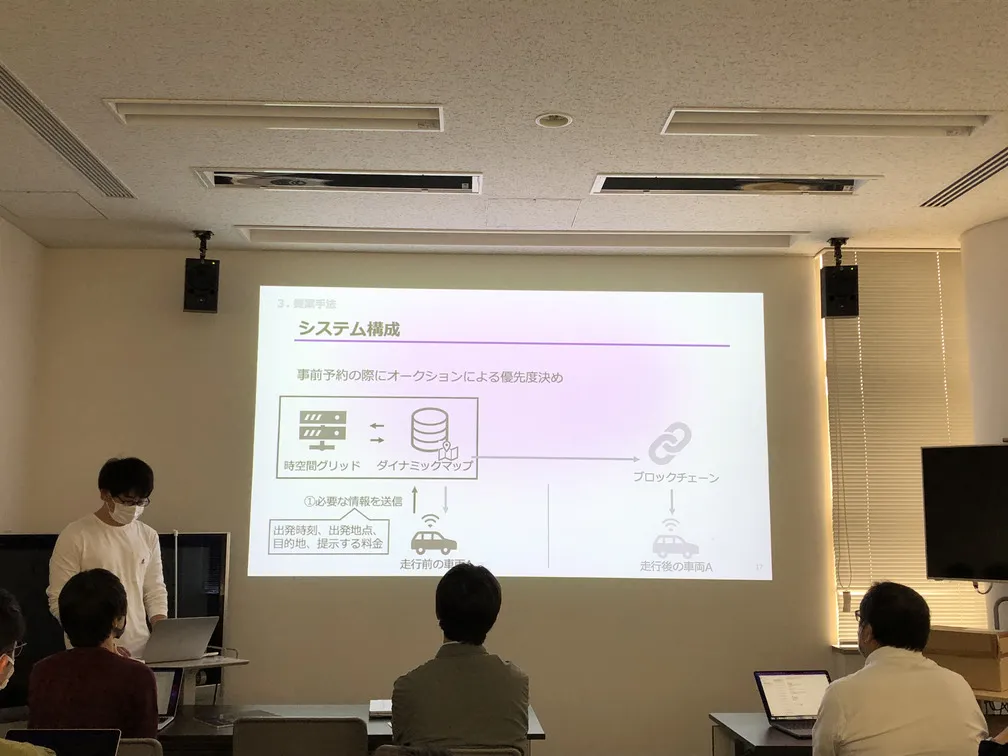
そこで本研究では,マイクロロードプライシングでの時空間グリッドの事前予約において,車両が支払う料金に応じて予約の優先度を決定するオークション方式を導入する.これにより関連研究に対して出発地から目的地までの旅行時間の短縮を目的とする.
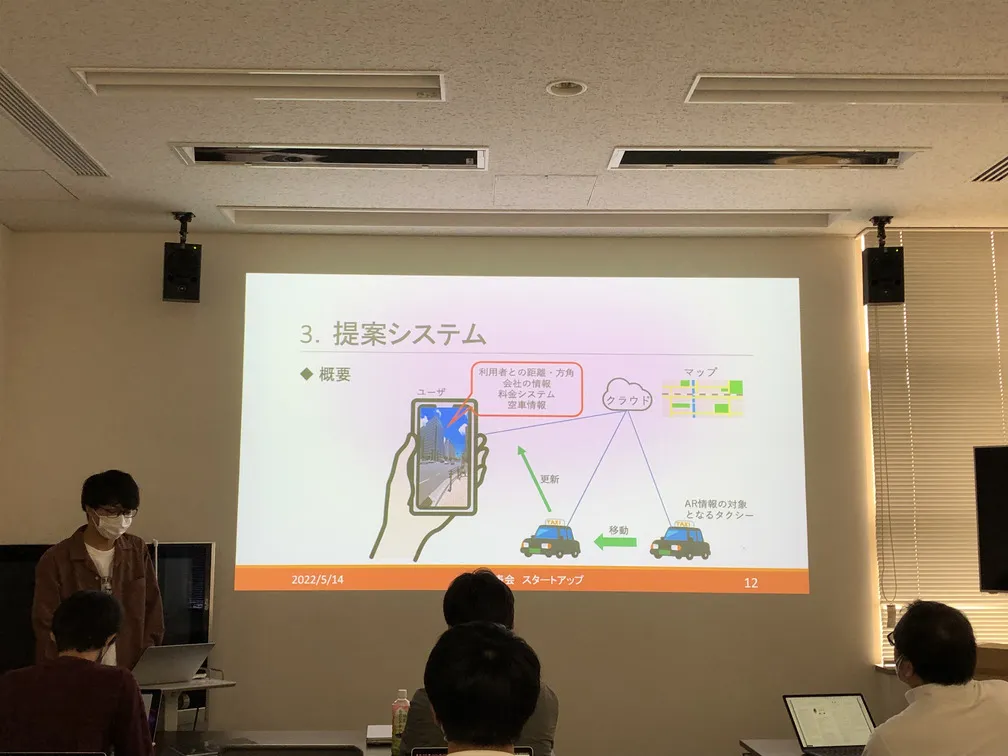
ビデオストリーミングにおける移動環境を考慮した動的MPQUIC モード選択手法による通信品質向上(松下 翔太)
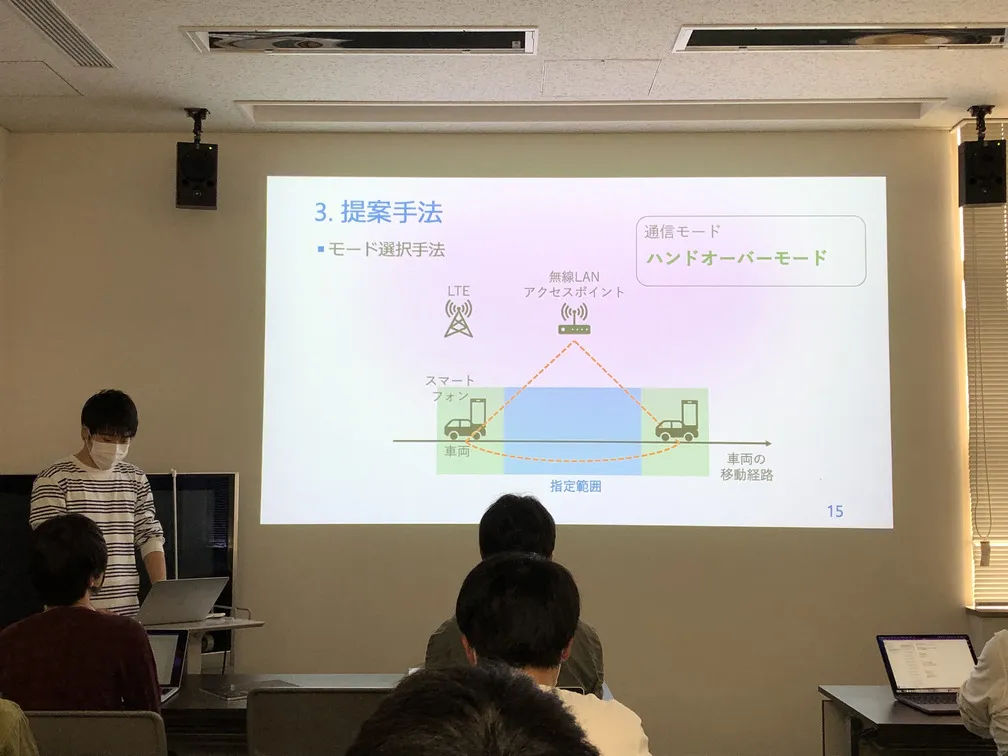
近年,ビデオコンテンツの需要が高まっており,2022年にインターネットトラフィックのうち82%がビデオストリーミングトラフィックとなることが予測されている.また,ビデオコンテンツの需要増加に伴い,インターネット上のトラフィックが増加したことで,ビデオストリーミングにおいて必要な通信帯域を確保することが困難となり,信頼性の高いビデオストリーミングを安定して配信することが難しくなっている.そこで,LTEや無線LANといった複数の通信経路を併用することで通信帯域を確保する技術が注目されている.しかし,通信状況が変化する移動時の通信環境において,柔軟に帯域を確保できないという課題がある.
そこで本研究では,移動環境下のスマートフォンやタブレット(以下,端末)でビデオストリーミングを再生する場合において,安定した通信帯域の供給を可能にする手法を提案することで,通信品質向上を検討する.
走行時の車両情報に基づく運転支援情報提示の制御手法(東田 悠希)
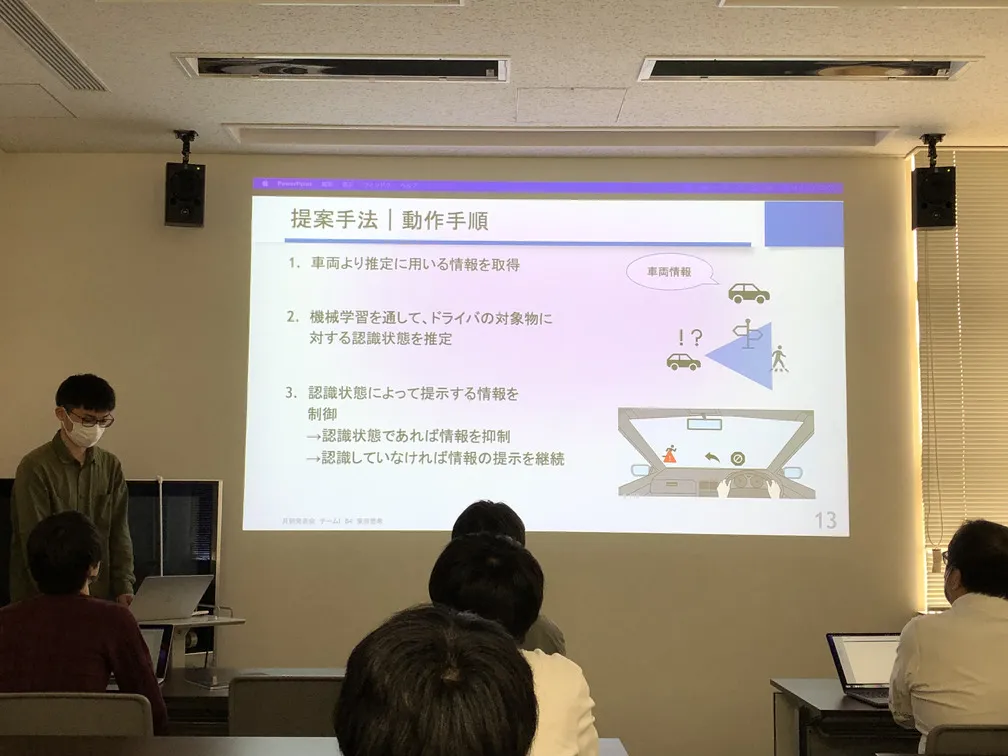
近年,様々な運転支援機能が普及したことによりドライバが取得できる情報が増加している.その運転支援機能の中には,ドライバに対して車両のフロントガラスに虚像を投影することで視覚的に様々な情報を伝えるHUD(Head Up Display)があり,これを用いて運転支援を行うための機能開発が行われている.しかし,車両の走行中などにドライバに対して情報を提示する場合,過剰に情報を提示しないなどのドライバのディストラクション(意識の脇見)を考慮した取り組みが必要となる.そのため運転支援を行うにあたり,情報全てを提示するのではなく,運転行動の阻害が起こらないかつドライバが必要とする適切な情報を適宜提示するような運転支援情報の制御が必要である.
本研究では,ドライバが車両を走行している際の車両情報を用いることで提示する運転支援情報を制御する手法を提案し,情報が提示されている際にもドライバが周囲の歩行者や道路標識,路面標示への認識を低下させることなく安全な運転を遂行することを目的とする.