2023年8月30日の三研究合同中間発表会(M2)において,佐々木 雄大(M2),平光 樹(M2),国本 典晟(M2),宮脇 弘充(M2),西川 瑳亮(M2),土居 大輝(M2),鈴木 彩門(M2)の7名が以下のタイトルで発表を行いました.
自動運転における緊急回避情報を用いた安全性向上手法の検討(宮脇 弘充)
近年,自動運転技術に関する研究が活発に行われており,今後普及することが期待されている.また,V2X(Vehicle-to-everything)通信を利用して周辺車両や路側機と通信を行うことで,車載センサの死角や周辺車両の情報を得ることができる車両もある.車載センサの死角や周辺車両の情報を得ることができるという利点を活かし,さまざまな運転支援サービスを提供する動きもある.見通しの悪い交差点において,
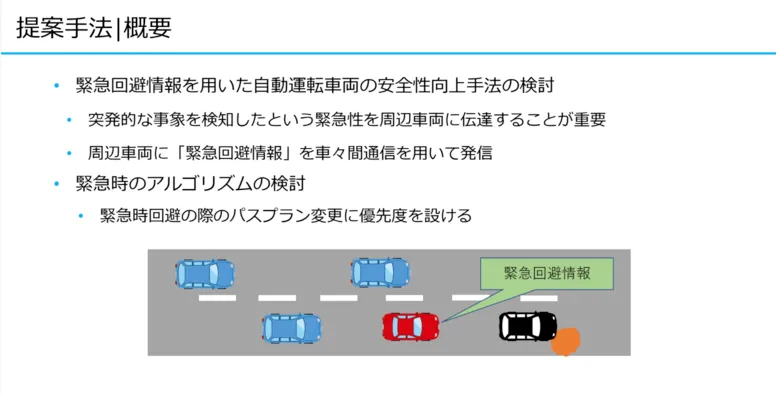
V2V(Vehicle-to-vehicle)通信で自車両のセンサ検知範囲外を走行している接近車両の情報を早期に得ることで衝突防止支援を行うようなサービスや,V2I(Vehicle-to-infrastructure)通信で右左折時の衝突防止支援や歩行者見落とし警告を行うようなサービスが検討されている.V2V通信と自動運転技術を併用することにより,現在に比べ安全で効率的な交通になることが期待されている.しかしながら,自動運転が普及したとしても,突発的な事故や落下物等の障害物は発生する可能性があり,発生した場合には回避する必要がある.高速道路においては,障害物を検知した車両が障害物情報を周囲の車両に発信する手法が検討されているが,回避行動をとる際には他の自動運転車両の存在を考慮することが必要である.そこで,本研究では全ての車両が通信機能を備えた自動運転車である高速道路において,事故や障害物等に起因する緊急回避の際のパスプラン変更に優先度を設ける手法を提案し,安全性を検討する.
リーダ車両を用いたV2X通信における効率的な証明書失効リスト配布手法(西川 瑳亮)
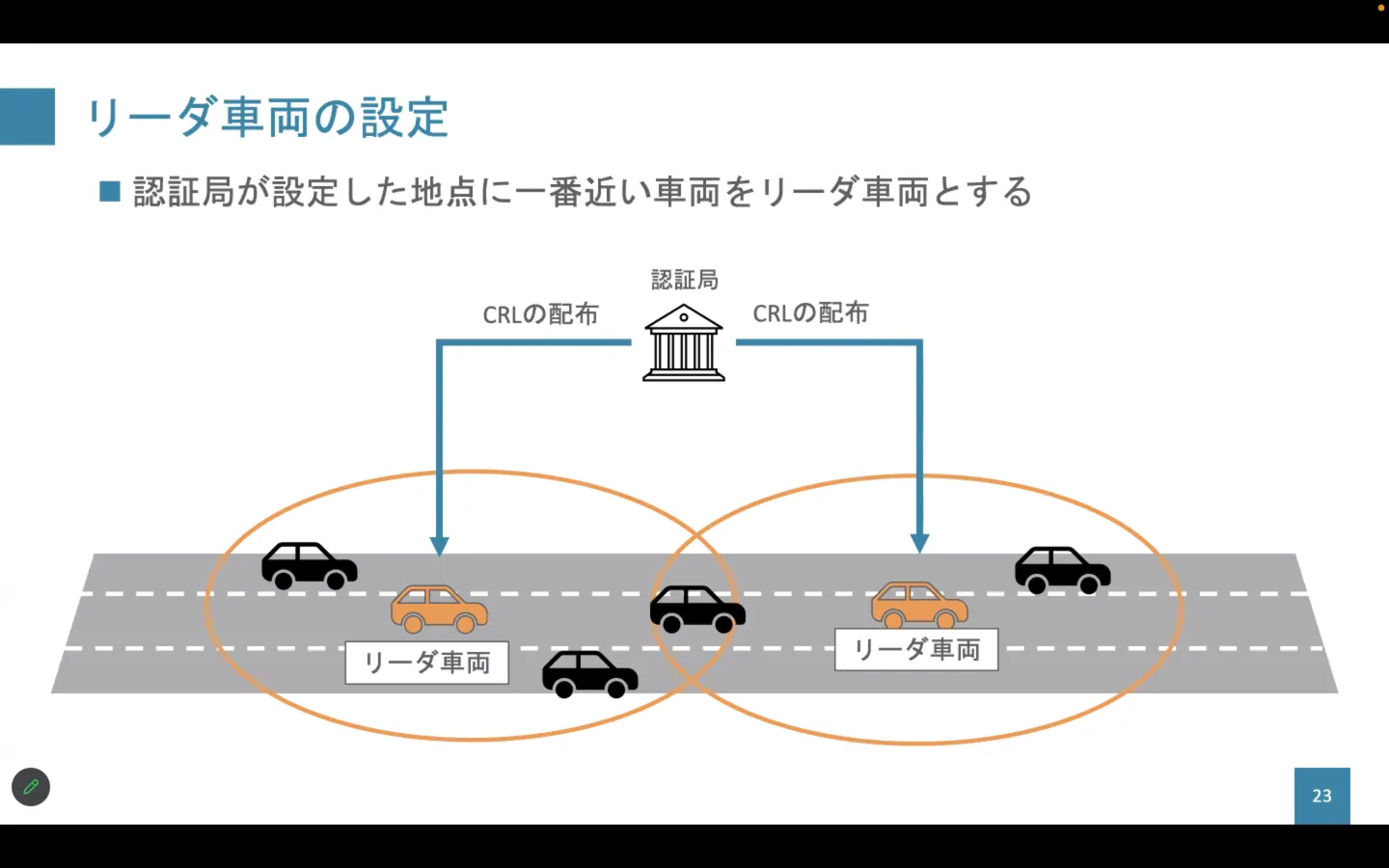
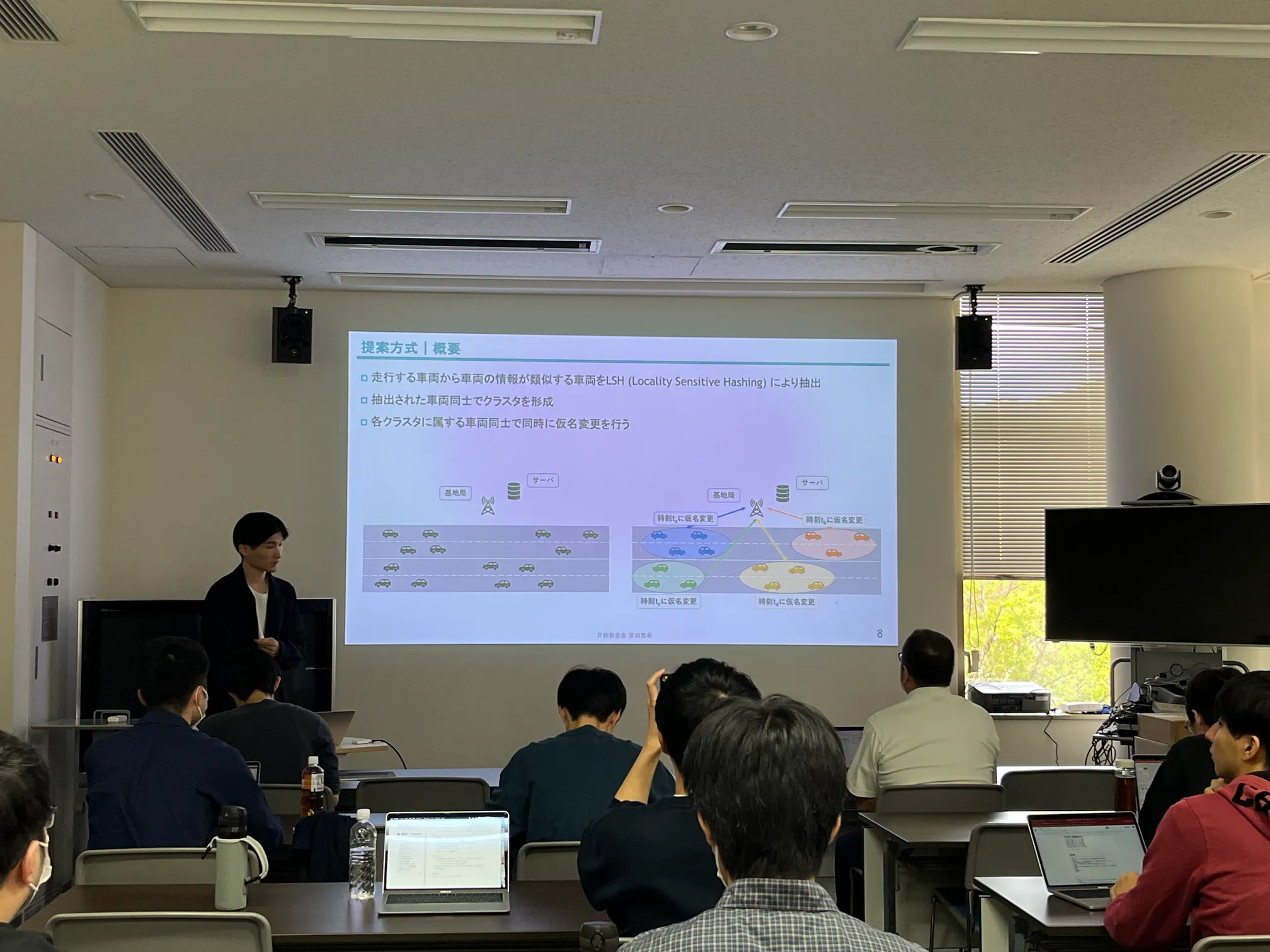
近年,V2X(Vehicle to Everything)通信に関する研究が盛んに行われている.このV2X通信は車両の事故防止や渋滞緩和など、交通の安全性や効率を向上させることが期待されている.一方で,車両の位置,速度,方向などを,自車両のIDと紐つけて近隣の車両にメッセージでやりとりするため,追跡が容易というセキュリティやプライバシ面の問題がある。その解決策の一つとして,仮名と呼ばれる一定間隔で何回も変更される車両IDを与え,それを用いて周囲の車両と情報をやり取りすることで,追跡を困難にする手法が検討されている.この手法では,仮名認証局が,不正な振る舞いをした車両や,機器のトラブル等によって正常な動作が期待できなくなった車両の仮名を失効させる.その失効させた車両のIDや全ての仮名を他車両に周知させるために
CRL(Certificate Revocation List)と呼ばれる失効した仮名のリストを配布する必要がある。しかし,この仮名変更方式では,失効した車両が増加するとCRLのデータサイズが大きくなり,CRL配布によって通信帯域が逼迫され、他のアプリケーションの通信に影響を与えてしまう課題がある.そのため,少ない通信トラフィック量でCRLを配布し,失効している仮名を把握する手法を検討する必要がある.
ARにおける指動作認識に基づく仮想入力インタフェースの検討(鈴木 彩門)
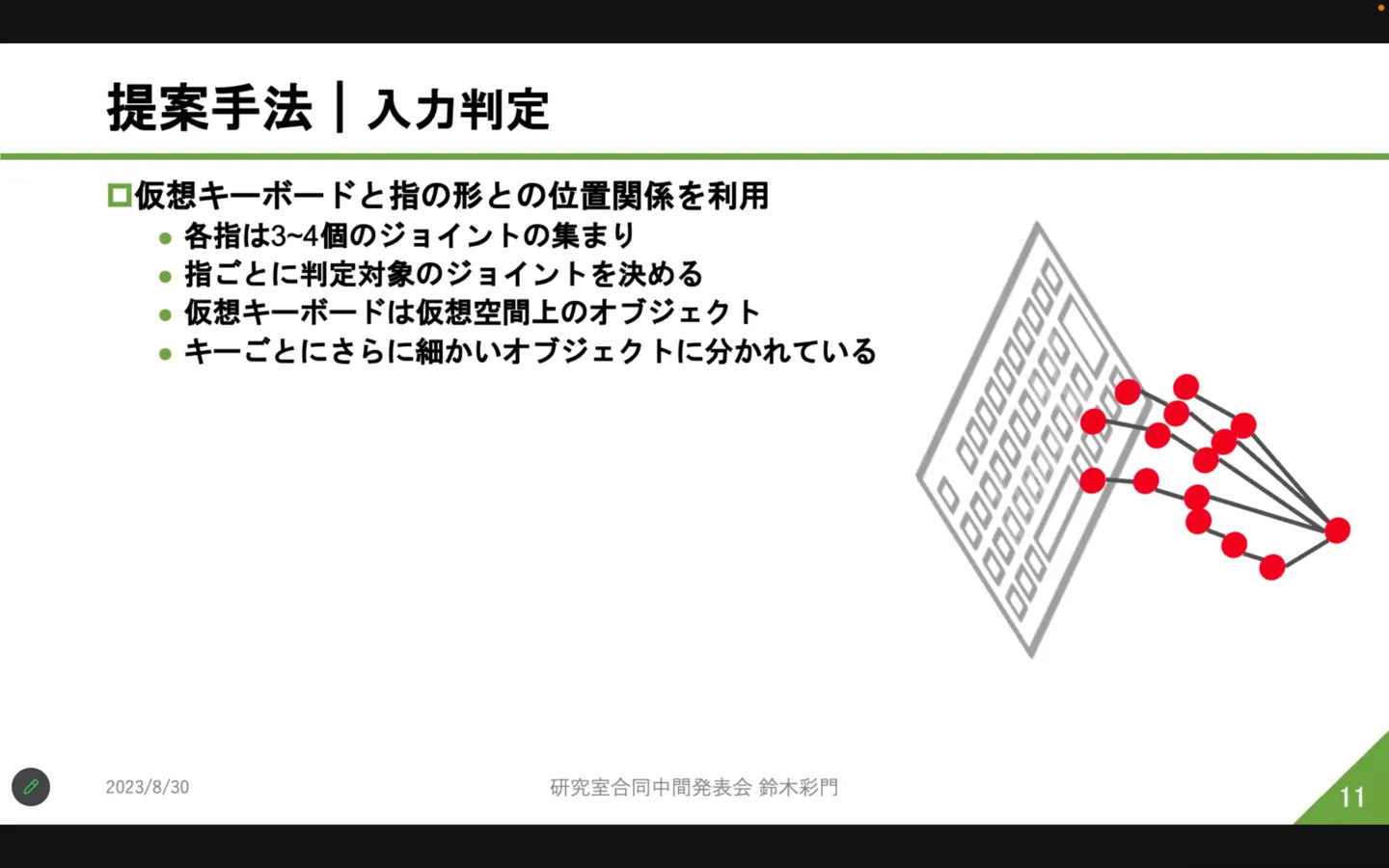
拡張現実(AR)は,近年急速に発展を続けており,スマートフォン等を通じて,一般にも広く利用されるようになっている技術である.その中でも,使用者の頭部に装着するHMD(Head Mount Display)を用いたARは,医療や教育,観光など,幅広い領域に広がってきているARHMDは,通信環境があれば動作する場所に制約がなく,頭部に装着することによって両手を自由に使用してAR体験を行うことができる.ARHMDには透過型のレンズがあり,それを通して見える現実世界に3Dコンテンツを重畳する.ARHMDにおいて様々なアプリケーションを実行する際には,テキスト等の入力を行うことが重要な要素となっている.ARHMDにおける入力には大きく分けて外部デバイスを使用するものとARHMDのカメラやセンサのみで行うものの2種類が存在する.前者の場合は,特殊な機器を別途用意する必要があり,金銭的なコストが生じてしまう.後者は,仮想的なオブジェクトに手で触れることで入力を行うもので,ARHMDさえあれば入力ができるため,手軽に使うことができる.しかし,現状使用されている方法では,人差し指のみで触れることでしか入力することができない.これは,入力する対象を1本の指に限定することで,入力の精度を高めるためである.しかし,現実世界にある物理的キーボードを使用する際,人差し指のみで入力することは少ない.Rickelらの調査によると,現状の入力方法に対して,全ての指を使って入力できるようにしてほしいというユーザが多く見られた.そのため,通常のキーボードと変わらない使用感で入力が可能なインタフェースが求められる.本研究では,ARHMDにおいて,物理的なキーボードと同様に,手の全ての指を使って入力することが可能な仮想入力インタフェースを提案する.
入力予測を用いた投機的実行によるマルチプレイヤクラウドゲームの応答時間低減(土居 大輝)
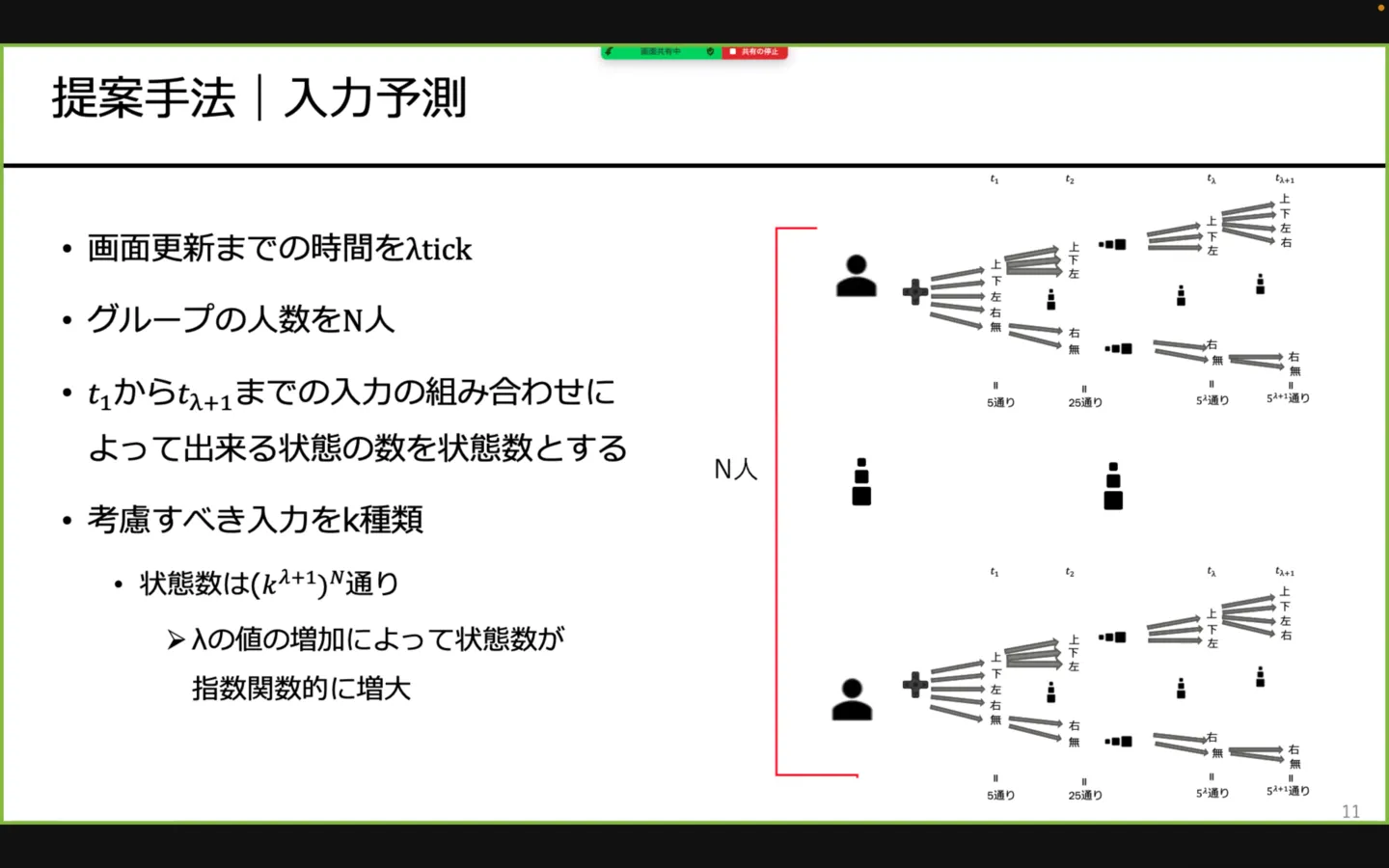
現在,ゲーム産業ではクラウドゲームが注目されている.クラウドゲームではクライアント側の処理が必要最低限に抑えられており,ゲーム内の演算処理やレンダリングは全てサーバで行われる.これによって,クライアントは端末の性能に関わらずプレイ可能で,サーバの強力なGPUを用いた高画質なゲーム画面でプレイすることも可能になる.また,開発者側もサーバでの一括管理が可能なため,バグの解消やアップデートが容易に行えるなどの利点がある.一方で,クラウドゲームはネットワークを経由して処理を行うため,サーバとユーザ間でデータの往復にかかる時間RTT(Round-Trip Time)の影響を受ける.そして,プレイされるゲームの多くは他の人と対戦・協力するマルチプレイのゲームであるため,プレイヤ間の公平性を保つため一番遅延が大きいプレイヤのRTTに合わせて,他のプレイヤに遅延をかける必要があるため,遅延が大きくなる.本研究では,マルチプレイヤクラウドゲームにおける応答時間を低減するために入力予測を用いる.入力予測を行う際に,一つの状態を予測するのではなく複数の状態を予測することで,予測が大きく外れた場合でも,予測をやり直さずに対処可能な手法を提案する.
車両走行環境を考慮したフリースペース危険度の段階的管理(平光 樹)

近年,ITS(高度交通システム)による安全運転支援の研究が行われている.ITSにより,車と車が通信を行うことで車の周辺情報を直接授受することで,必要に応じた運転支援を行うことができる.また,路側インフラ設備や車と通信を行うことで運転手に運転の危険性を伝えることができる.これらのITSを用いた事故の防止につなげる取り組みが広まりつつある.しかし,未だに減少傾向にはあるものの事故は発生している.これらの事故は運転手の道路環境の認識が不十分だったことや,建物で隠れているため死角領域の情報が不足し,出会い頭の事故につながったのだと考えられる.そのため,ITSにより運転手により効果的に危険度を伝え,安全な走行を促すシステムが必要である.本研究では,車載センサによって車両前方のフリースペースの危険度を段階的に管理することで正確に危険度を定め,HUD(Head UpDisplay),車々間通信によって,死角のある交差点を右折する際の危険度を死角車両のフリースペースの状態から判断し,運転手にAR表示することで安全に右折することを可能にする手法を提案する.なお,死角に存在し自車両からでは視認することのできない車両を死角車両とする.
ネットワーク仮想化技術を利用したQoS予測・予約によるV2X通信の信頼性向上(国本 典晟)
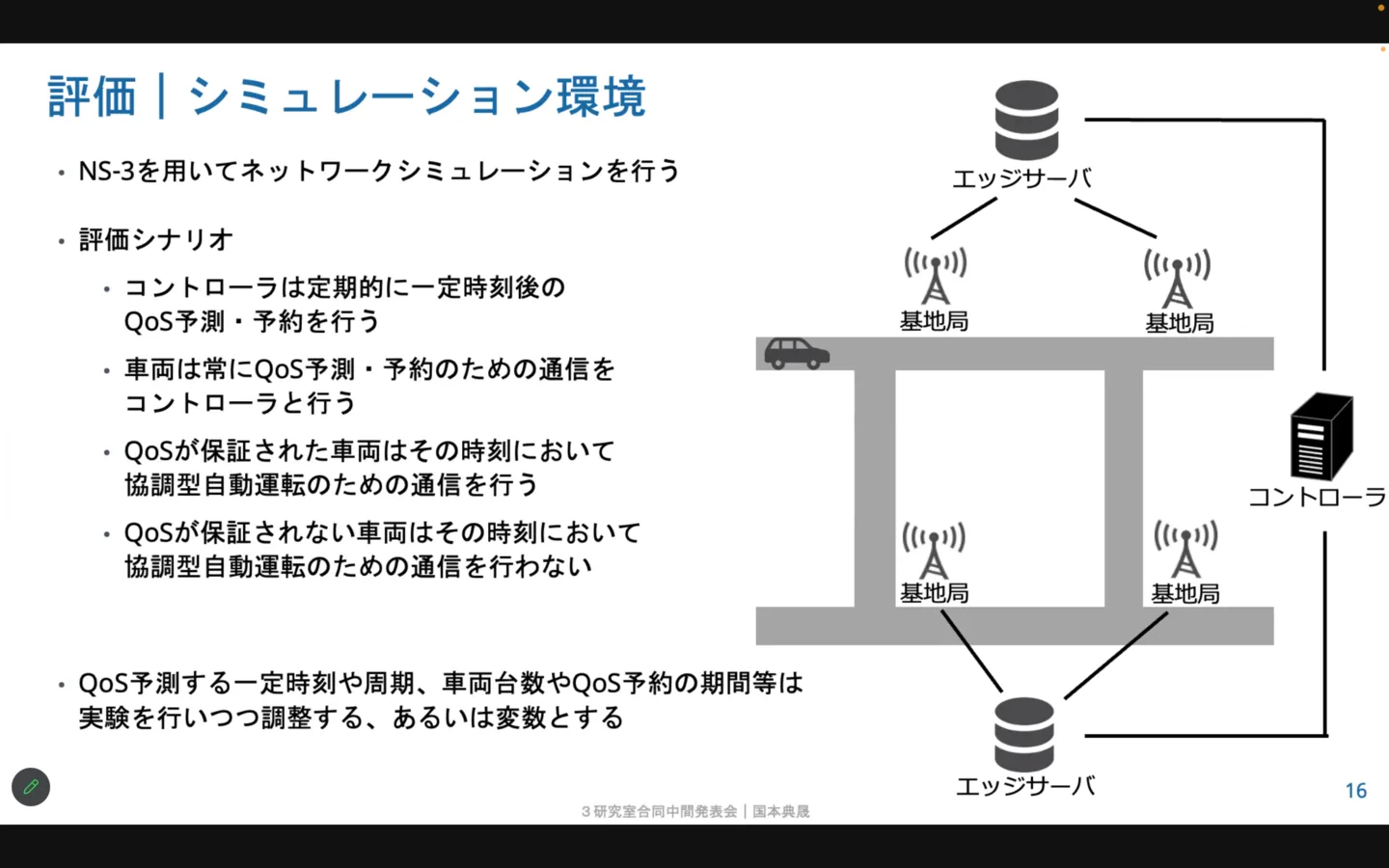
車両に搭載されたセンサで認識できる範囲は限定的であるため,周囲の車両や路側機のセンサが認識した情報を通信により共有することで,交通の安全性や効率の向上を目指す協調型自動運転の研究が行われている.各車両や路側機が収集したセンサデータをサーバ上で集約し,統合した情報を車両に配信することで,車両は自車両の搭載センサでは認識できない情報を取得することができる.センサデータを集約・統合するサーバとしてインターネット上のクラウドサーバを利用する場合,膨大な数の車両からのデータをインターネットを介して扱うため,処理負荷や通信遅延が増大し,衝突危険警告や合流調停などの遅延要件を満たすことができないことが懸念される.そこで,車両とクラウドサーバの間に地理的に分散配置されたエッジサーバを利用することで,処理負荷の分散や通信遅延の軽減が期待されている.エッジサーバは自身が管轄するエリア内に存在する車両や路側機と基地局を介した通信によりデータを集約し,協調型自動運転のための処理を行う.しかし,エッジサーバまでの通信帯域で収容可能な台数以上の車両がエリア内に集中した場合,通信帯域が逼迫し,一部または全ての車両とエッジサーバの通信の遅延が増大し,通信の品質(Quality of Service, 以下QoS)を保証することができないことが懸念される.QoSを保証できない場合,車両は情報を遅延要件内に取得可能か判断できないまま協調型自動運転を試みることになり,安全性や効率の点で重大な問題となる.本研究では,ソフトウェアを介してネットワークを一元管理するネットワーク仮想化技術を利用して,QoSの予測・予約を行うことで車両の通信のQoSを保証することを提案する.
ネットワーク環境に応じた動的スケジューリング方式によるWebページ読込み時間削減手法(佐々木 雄大)
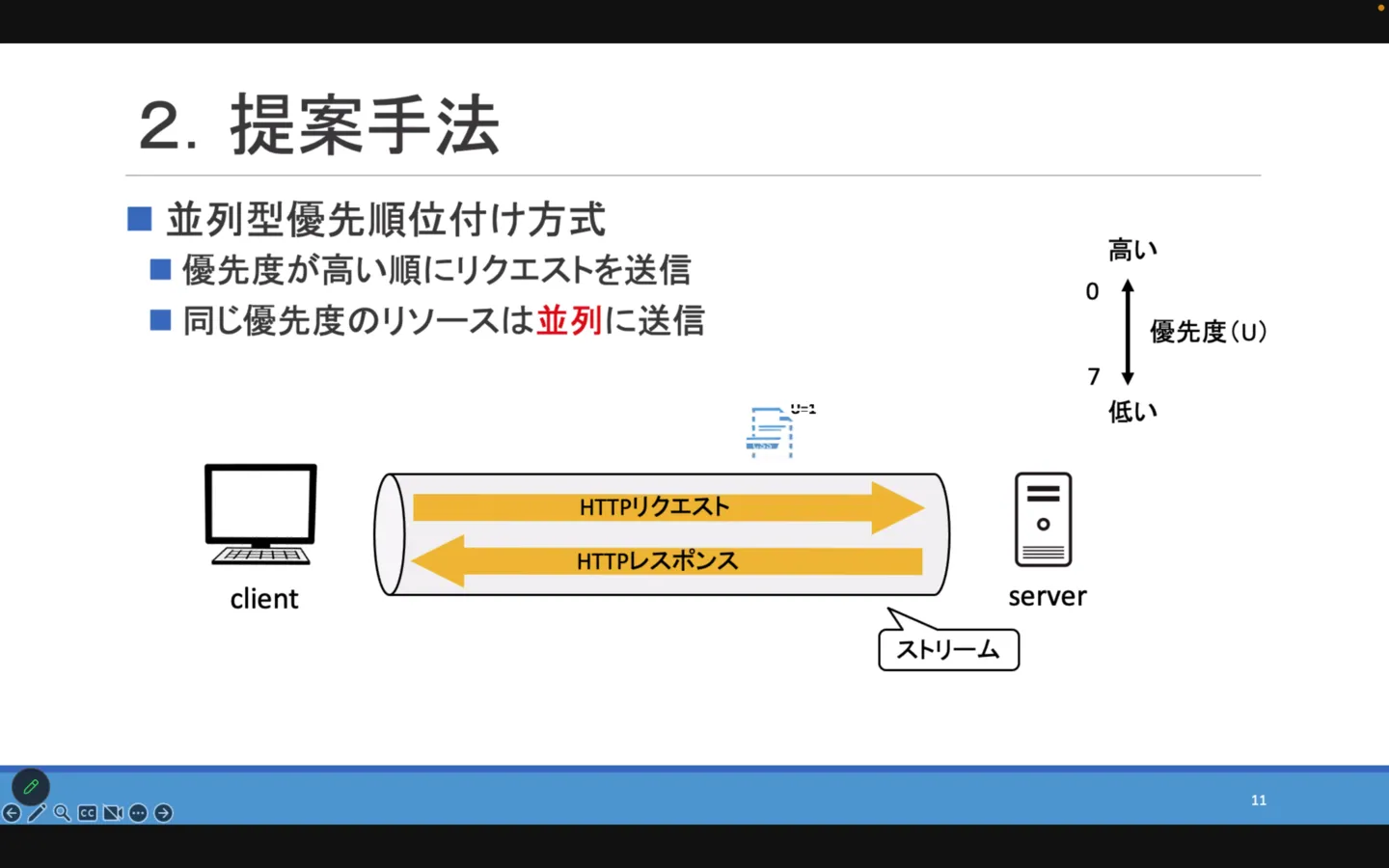
近年,スマートフォンなどの普及により,インターネットの利用率は増加している.一方で,通信品質の悪化などによるWebページ読込み時間の増加は,ユーザ満足度に影響し,ユーザは読込み速度の遅いWebページから離れる傾向にある.こうした状況を踏まえ,Webページ読込み時間を削減するために開発され,現在IETFによって標準化が進められているのがQUIC(Quick UDP Internet Connections)である.HTTP/3は,トランスポート層にQUICを採用することで,従来のHTTP/2よりも高速な通信を実現する.その要因の一つとして,QUICではUDP上にストリームの多重化を再実装しており,各ストリームでのパケットロスが他のストリームに影響しない仕様となっているため,トランスポート層でのHoL(Head-of-Line)ブロッキングを解消している.また,各ストリームはHTTPリソースの優先順位付けによって管理しており,HTTP/3では従来のHTTP/2よりも単純かつ柔軟性の高いEPS(Extensible PrioritizationScheme)と呼ばれる優先順位付け方式が再設計された.しかし,HTTP/3の最適な優先順位付け方式は確立されておらず,例えば,高いパケットロス率のネットワークでは並列型優先順位付け方式のパフォーマンスが高くなることがわかっている.そこで本研究では,HTTP/3での通信において,ネットワーク環境に応じて動的にスケジューリング方式を選択することで,ページ読込み時間を削減する手法を提案する.