2023年10月7日の第151回月例発表会において,東田 悠希(M1),坂本 拓馬(M1),山﨑 慎也(M1),松村 学(M1),松下 翔太(M1),森田 暉之(M1)の7名が以下のタイトルで発表を行いました.
LSH に基づいた類似車両抽出による V2X 通信の仮名変更方式の検討(東田 悠希)
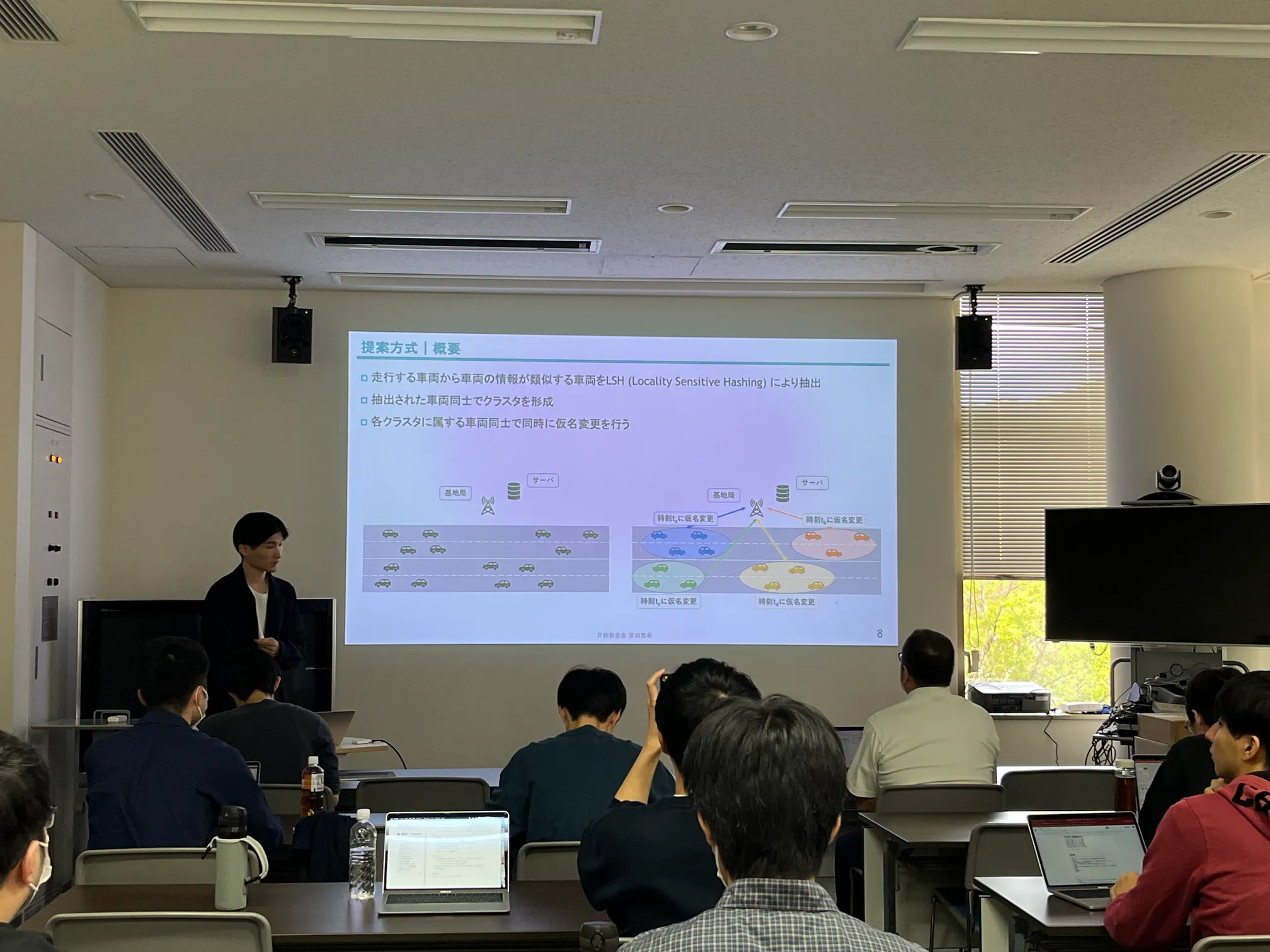
近年,車両とあらゆるものが通信を行う V2X (Vehicle to Everything) 通信に関する研究が盛んに行われている. V2X 通信では自車両の速度や位置情報等のメッセージを周囲の車両等に送信することで車両同士の事故防止や渋滞の緩和などに繋がることが期待されている.しかし,メッセージには平文で送信される情報が含まれているため,悪意のある攻撃者によって車両が送信するメッセージが盗聴・追跡されると,ドライバの位置プライバシが脅かされる問題がある.この問題を解決するために仮名を用いた方式が検討されている. 仮名とは,実際の識別子の代わりに割り当てられる仮の識別子のことであり,仮名を様々な条件の基で繰り返し変更して通信を行うことで攻撃者による特定車両の追跡を困難なものにする. しかし,これに対してもリンク攻撃と呼ばれる攻撃が存在し,攻撃者が仮名の変更規則やメッセージに含まれる位置情報等を解析し,仮名の変更前と変更後の車両をリンクすることで特定車両を継続して追跡出来る問題がある. 本研究では,車両が送信するメッセージの中から車両の速度や位置情報等で類似する情報を持つ車両を LSH (Locality Sensitive Hashing) により抽出し,類似した情報を持つ車両で協調的に仮名を変更することで攻撃者による仮名変更前後の車両のリンクを困難にし,高い位置プライバシの保護を実現する方式を提案する.近年,車両とあらゆるものが通信を行う V2X (Vehicle to Everything) 通信に関する研究が盛んに行われている. V2X 通信では自車両の速度や位置情報等のメッセージを周囲の車両等に送信することで車両同士の事故防止や渋滞の緩和などに繋がることが期待されている.しかし,メッセージには平文で送信される情報が含まれているため,悪意のある攻撃者によって車両が送信するメッセージが盗聴・追跡されると,ドライバの位置プライバシが脅かされる問題がある.この問題を解決するために仮名を用いた方式が検討されている. 仮名とは,実際の識別子の代わりに割り当てられる仮の識別子のことであり,仮名を様々な条件の基で繰り返し変更して通信を行うことで攻撃者による特定車両の追跡を困難なものにする. しかし,これに対してもリンク攻撃と呼ばれる攻撃が存在し,攻撃者が仮名の変更規則やメッセージに含まれる位置情報等を解析し,仮名の変更前と変更後の車両をリンクすることで特定車両を継続して追跡出来る問題がある.
本研究では,車両が送信するメッセージの中から車両の速度や位置情報等で類似する情報を持つ車両を LSH (Locality Sensitive Hashing) により抽出し,類似した情報を持つ車両で協調的に仮名を変更することで攻撃者による仮名変更前後の車両のリンクを困難にし,高い位置プライバシの保護を実現する方式を提案する.
ホームネットワークにおける IoT デバイスのセキュリティ向上システムの提案(坂本 拓馬)

近年,IoT(Internet of Things) の発展により,多くのモノがインターネットに接続され,利便性が高まる一方で,セキュリティ上のリスクも高まっている.IoT デバイスは,最低限の性能を発揮する CPU やメモリしか保持していないことが多く,適用できる機能が限られているという問題がある.そのため,ログ出力や暗号化などのセキュリティ対策を IoT デバイスに直接適用することは困難となる.また,ホームネットワークのユーザは一般的にセキュリティに関しての知識を持っておらず,ユーザ自身でセキュリティの設定を行うことは困難である.そこで,ユーザの負担を減らしつつ,セキュリティ対策を施す手法の 1 つとして,MUD(Manufacturing Usage Discription)という規格が提案されている.MUD では IoT デバイスの製造元が通信ポリシーを記述したファイルを作成し,その通信ポリシーに従って通信制御を行う.実際に,SDN(Software Defined Networking)を用いて中小規模のネットワークに MUD を適用する方式が提案されている.しかし,製造元はすべての使用環境を想定することはできないため,適切な通信ポリシーが作成されないことでセキュリティの問題や,IoTデバイスの機能を最大限活用できないなどの問題が発生する.また,MUD によるセキュリティ対策は家庭内に構築した LAN 環境などのローカル環境において,攻撃の侵入を許した IoT デバイスからの攻撃のようなローカル環境内部からの攻撃には弱いといった問題がある.そこで本研究では,IDS(Intrusion Detection System) を用いて侵害されたローカル環境内の IoT デバイスからの攻撃を検知し,侵害された IoT デバイスを SDN を用いてネットワークから切り離すことで攻撃による被害を最小化するシステムを提案する.
CAV のセンサ検知範囲の重複度に応じた送信間隔割り当て手法(山崎 慎也)
近年,車両の周辺環境の認識を向上させる技術として CPS(Collective Perception Service)に関する研究が盛んに行われている.車両と路側機がセンサで検知したオブジェクトの座標,速度,加速度,方向などのオブジェクト情報を V2X(Vehicle-to-Everything)通信を用いて他の車両や路側機と共有することで,車両の周辺環境の認識が向上し,交通の安全性の向上が期待されている.現在,ETSI(European Telecommunications Standards Institute)は CPSの標準化に取り組んでおり,車両と路側機がセンサで検知したオブジェクト情報を送信するためのメッセージである CPM(Collective Perception Message)の規格を定めている.車両がセンサで検知したオブジェクト情報と以前に受信した CPM に含まれるオブジェクト情報を CPM に含みブロードキャストすることでオブジェクト情報を共有する.
しかし,複数の車両が CPM を定期的にブロードキャストすることにより,同じオブジェクト情報を複数回共有してしまうため,通信帯域が逼迫する恐れがある.通信帯域が逼迫すると車両が必要とする CPM を受信することができなくなる可能性があり,車両の周辺環境の認識の低下に繋がる.
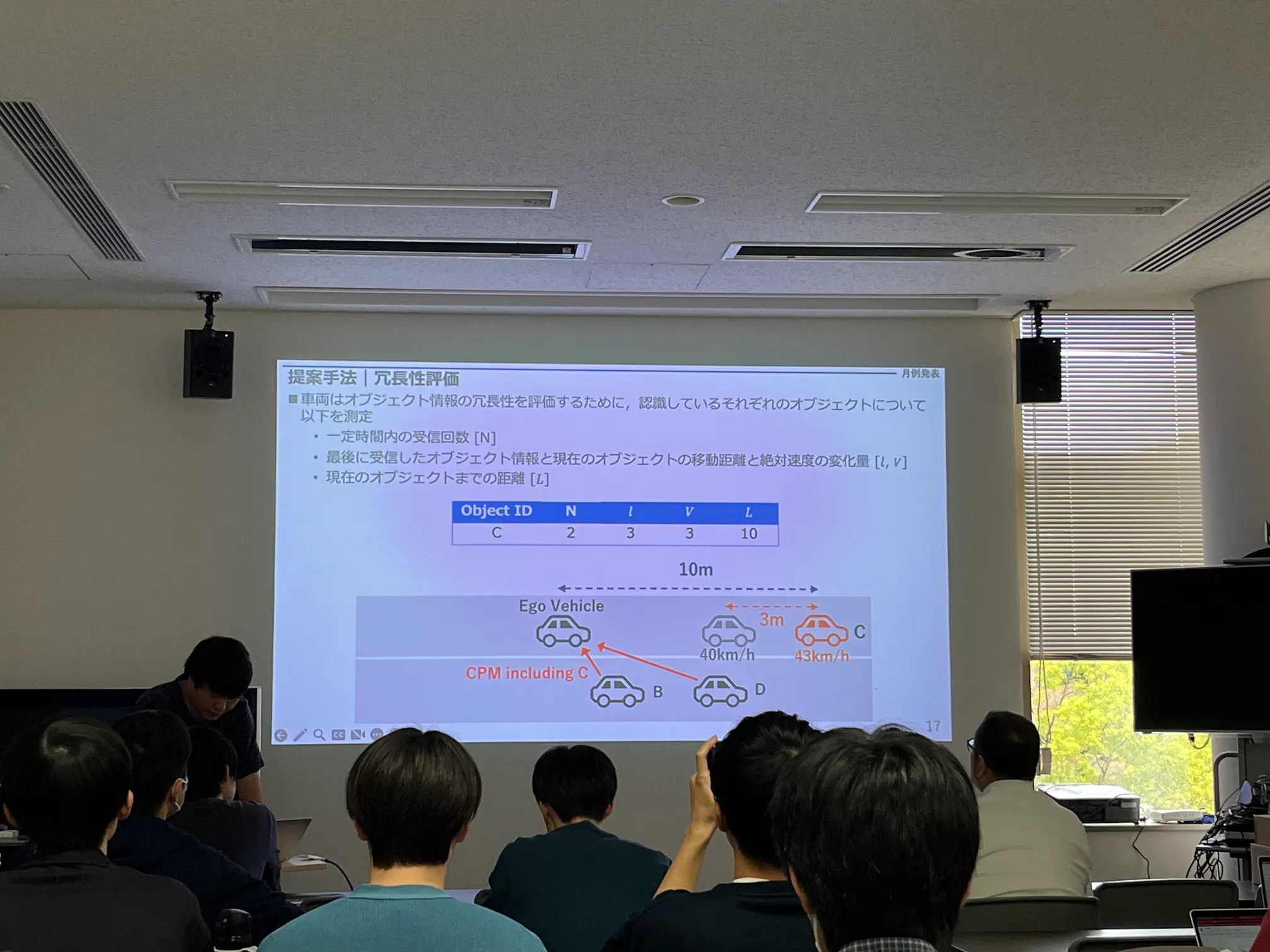
この問題に対して,ETSI は冗長なオブジェクト情報を削除することで CPM のメッセージサイズを縮小する手法である RMR(Redundancy Mitigation Rule)を複数提案している.しかし,それぞれの RMR によってオブジェクト情報の冗長性の判断基準が異なるため,車両台数や車両の速度,加速度などによって CPS の性能が低下する恐れがある.
本研究では,提案されている 3 つの RMR をもとに冗長性の大きいオブジェクト情報を抽出し削除することで,メッセージサイズを削減し通信帯域の逼迫を抑え周辺車両の認識を向上させる手法を提案する.
協調型自動運転車両と手動運転車両の混在状況における時空間グリッド予約による道路合流調停手法(松村 学)
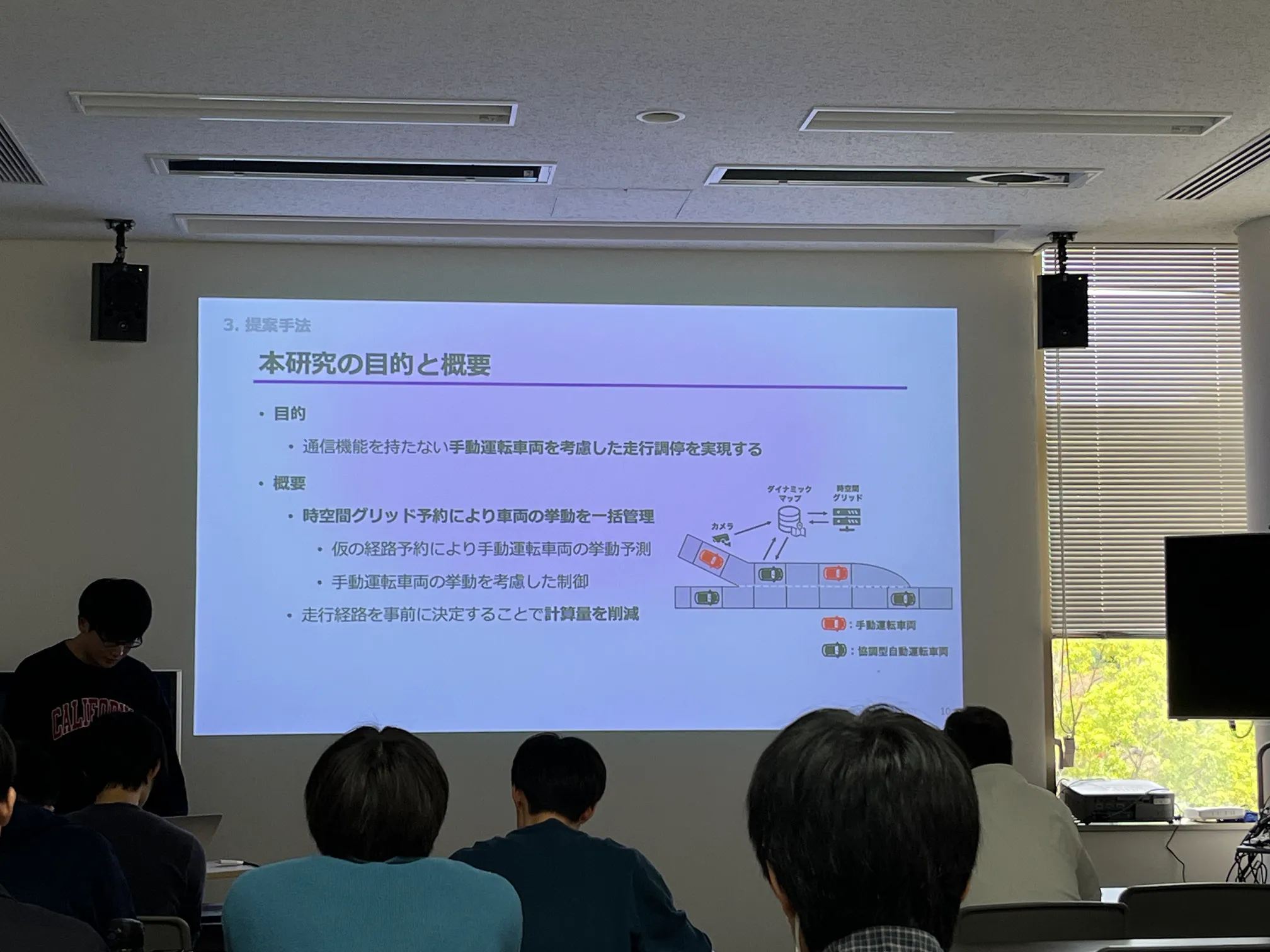
近年、協調型自動運転車両に関する研究が進められている.協調型自動運転では、V2V(Vehicle-to-Vehicle) 通信やV2I(Vehicle-to-Infrastructure)通信を用いて,自車両の情報を基に事前に走行経路を決定することで自動運転車同士が協調的に走行することが可能となる.協調型自動運転の走行調停手法としてダイナミックマップによる時空間グリッド予約の利用が検討されている.時空間グリッド予約の概要を図 1 に示す.時間と道路空間を区切って作成したセルの集合体を時空間グリッドとして定義し,車両は走行したい時空間グリッドを事前に予約することで車両走行の調停をとる.しかし,時空間グリッド予約による走行調停手法は全ての車両が自動運転車両であることを前提としている.自動運転車両の完全な普及は長期にわたることが想定されているため,通信機能を持たない従来車両を考慮した自動運転車両の制御手法の提案が必須である.本研究では,協調型自動運転車両と通信機能を持たない従来車両が混在する状況において,時空間グリッド予約による道路合流調停手法を提案する. 手動運転車両の走行経路を予測した時空間グリッド予約を行うことで,手動運転車両との混在状況を考慮した協調型自動運転車両の時空間グリッド予約を実現する.協調型自動運転車両を制御することで効率的かつ安全な合流調停を目指す.
協調型自動運転のためのオブジェクト移動を考慮した占有格子地図の検討(松下 翔太)
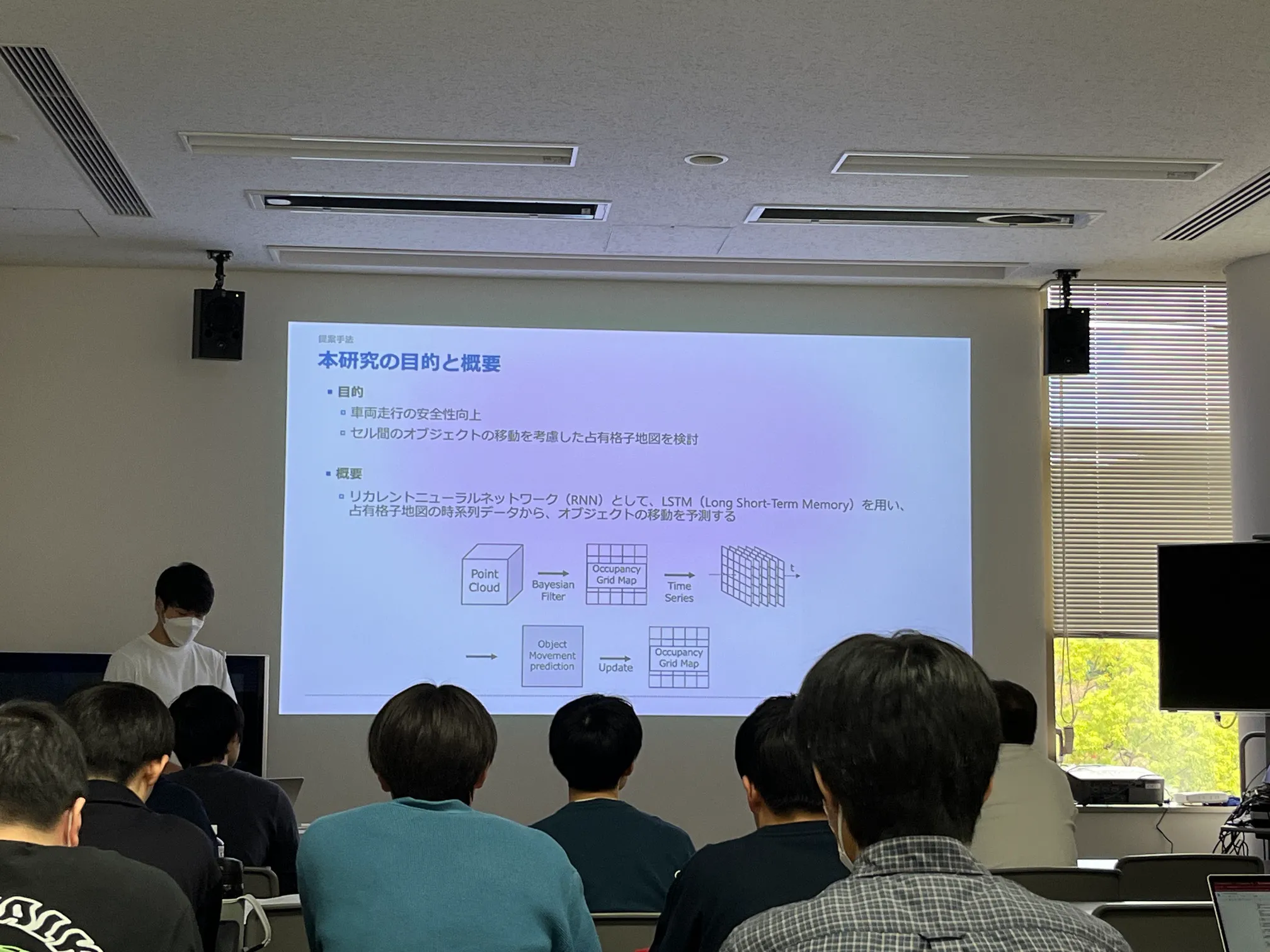
近年,車載センサや路側センサから得られたセンサ情報を通信技術を用いて共有することで,高度な自動運転を実現する協調型自動運転が注目されている.協調型自動運転では,得られたセンサ情報を統合することで,自車両からは死角となっている歩行者や車両などのオブジェクトを検知することができる.センサ情報を統合する手法として,センサ間で共通な格子状の地図を用いる手法である占有格子地図がある.しかし,占有格子地図は各セルが独立してオブジェクトの存在確率を計算するため,セル間でオブジェクトが移動することが考慮していない.そのため,車両の死角から飛び出しがあった場合に,車両の急停止や急減速が発生し,走行の安全性が低下するという問題がある.そこで本研究では,占有格子地図の時系列データを用いて,オブジェクトの移動を予測する手法を提案し,安全性の向上を検討する.
歩行者メッセージと車載センサの認識情報を用いた歩行者情報の関連づけ手法(森田 暉之)
近年,高度道路交通システムにおいて,歩行者や自転車利用者などの VRU(Vulnerable Road User) を対象とした,衝突予測を通知するシステムなどの研究が進められている.V2X(Vehicle-to-Everything) 通信では,車両と VRU による交通事故を未然に防ぐために,車両同士または車両と VRU がメッセージを通して情報交換することが想定されており,周辺環境認識や VRU のデバイスへの注意喚起を実現できる.V2X 通信にて,車両や歩行者から共有されるメッセージには,自身の位置情報や速度等が含まれる.車両は,GPS(Global Positioning System) に加えて,車載カメラを用いた車線検出等を併用できるため,精度の高い自己位置推定が可能である.一方で,歩行者の位置情報は,GPS のみに依存した位置推定であるため,車両と比較すると位置精度は低く,数メートルの誤差が生じることが知られている.そのため,歩行者から送信される位置と車両が認識した歩行者の位置は整合性に欠け,両者が同一の歩行者かどうかを判定することが困難である.その結果,メッセージに含まれる歩行者の属性情報(年齢,性別など)を反映できず,歩行者の状況を十分に把握できないため,適切な安全支援や情報提供を行うことができない.以上から,歩行者の位置を正確に知ることに加えて,車両によって認識された歩行者とメッセージを送信した歩行者を紐づける必要がある.本研究では,車両が車載センサや V2X 通信により周辺環境を認識する際に,認識した歩行者に関して,その歩行者と車載センサが生成する情報から,歩行者の位置情報と歩行者から提供される情報を関連づけ,歩行者への安全支援を行うための歩行者認識を行う.また,V2X 通信を利用することで,他車両の車載センサで得られた情報も活用し,歩行者を一意に特定する方法を提案する.

