2023年8月23日,同志社びわこリトリートセンター(滋賀県)にて行われた第150回月例発表会において,岩井駿人(B4),髙田陽輝(B4),田牧浩月(B4),東 葵(B4),辰己弘征(B4),梅田寛斗(B4),松本翔汰(B4),田中 誠也(B4)の8名が以下のタイトルで発表を行いました.
対テトリスにおけるぷよぷよAIアルゴリズムの比較(岩井駿人)

近年の人工知能(AI)の進化によって,AlphaGoをはじめとするAIシステムが,様々な領域で人間をはるかに上回る成果を出している.その一例として,ZetrisやColdClearなどのテトリスAIが挙げられる.これらのAIはテトリスのプロを圧倒的に凌駕する強さを実現しており,ぷよぷよテトリスというゲームを起点にその実力が注目されるようになった.ぷよぷよテトリスは,ぷよぷよとテトリスの二つのパズルゲームを組み合わせたゲームで,プレイヤーはそれぞれ得意なゲームを選択して対戦することができる.ぷよぷよの連鎖構築に関連する研究は存在する.しかし,それらの対テトリスにおける有用性を示した研究が存在しない.そこで本研究では,ゲームAIで扱われるアルゴリズム3種類を対テトリスのぷよぷよに適用し,アルゴリズムの有用性を比較することを目的とする.ぷよぷよAIの従来の目的は,連鎖構築にある.ぷよぷよの試合では,大きな連鎖を構築することが重要となってくるためである.しかし,テトリスとぷよぷよが対戦を行う際にはぷよぷよ側は,テトリスが送るおじゃまを受けながら自フィールドで3~6連鎖を構築し,徐々にテトリスをゲームオーバーに追い込む,といった戦法が一般的で,その観点からも従来のぷよぷよのAIとは大きく異なることがわかる.
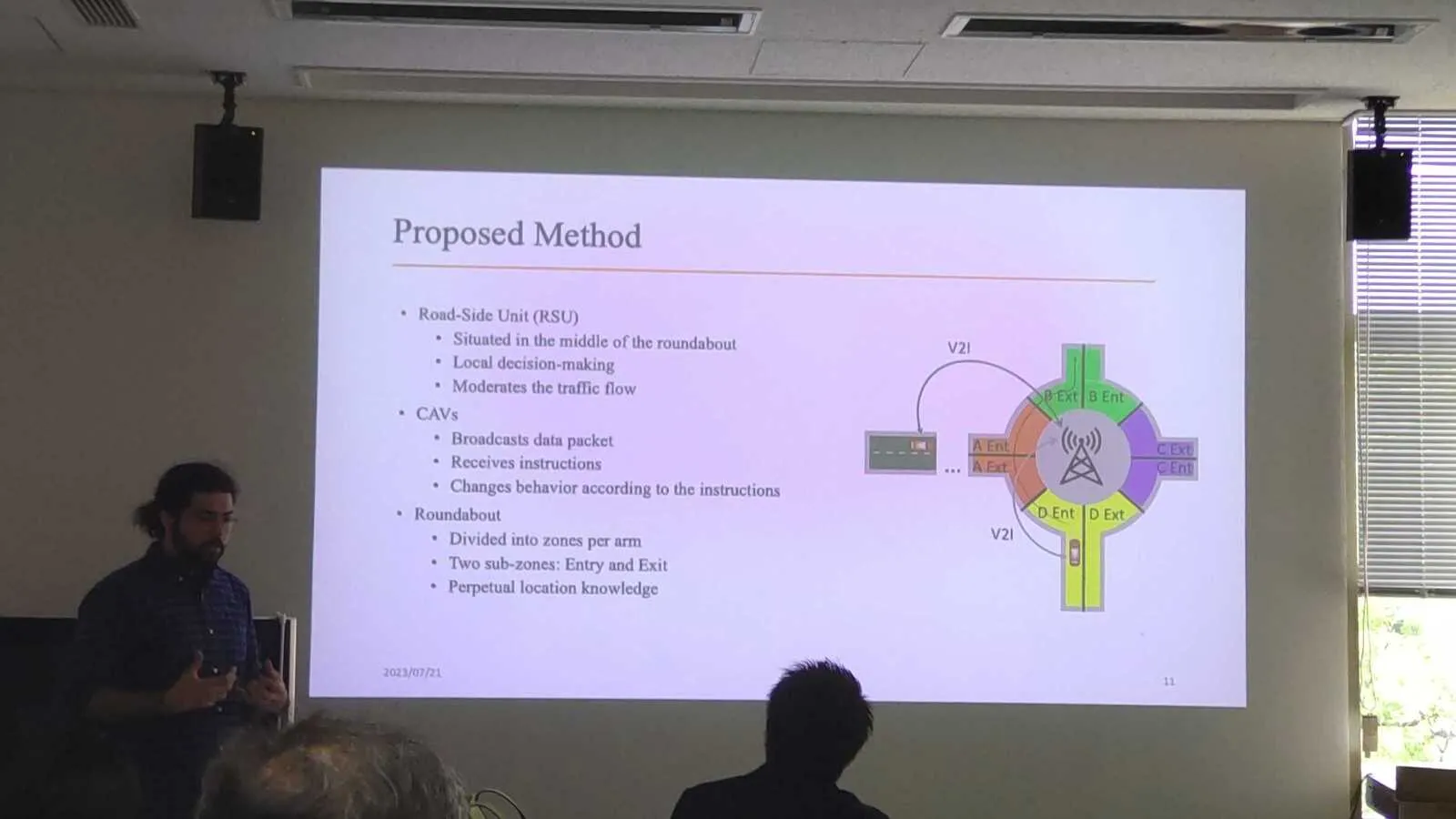
車車間通信を利用した協調型自動運転車両の合流調停手法の検討(髙田陽輝)
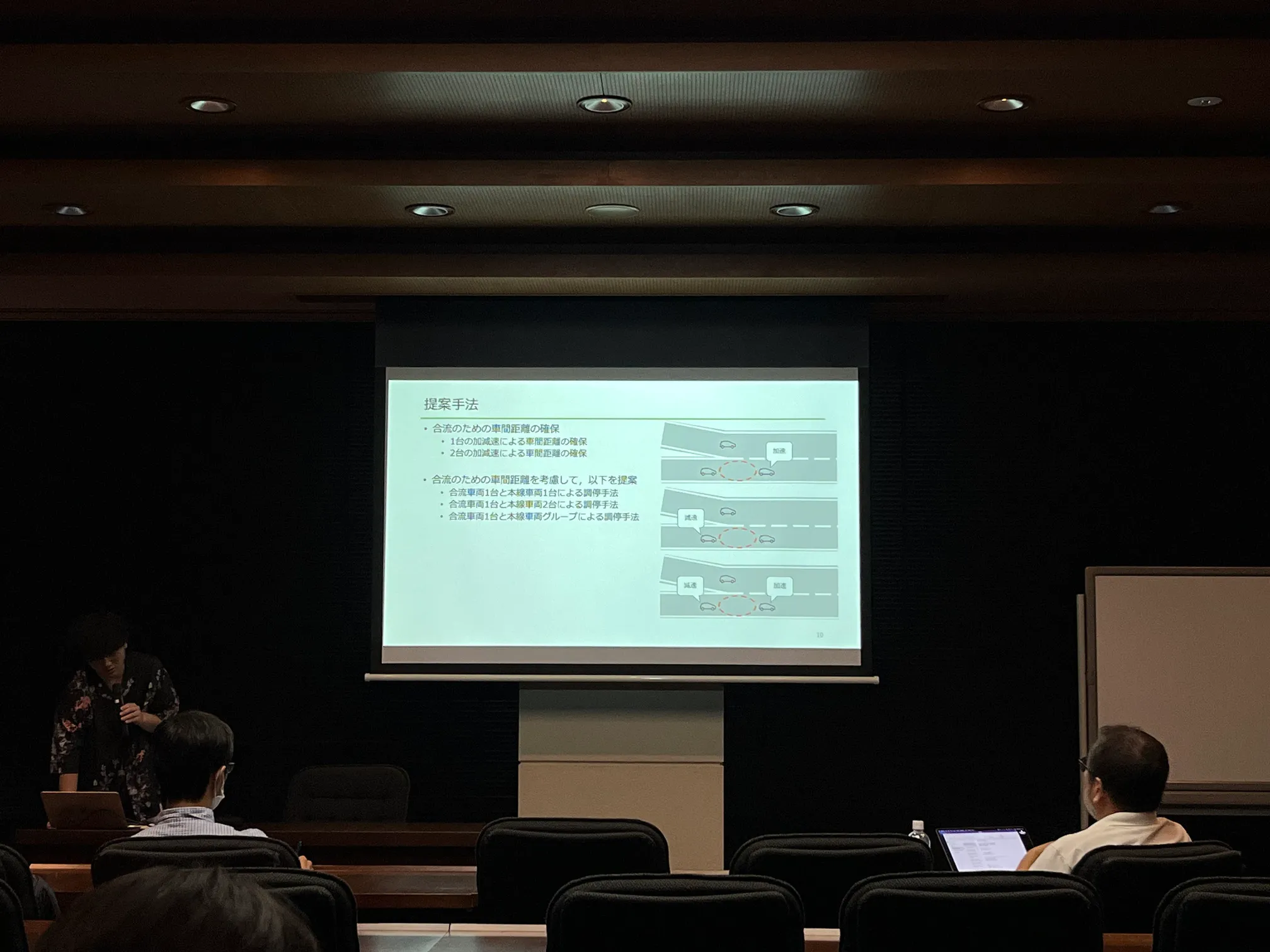
近年,協調型自動運転車両に関する研究が盛んに行われている.協調型自動運転車両とは,自車両の車載センサから取得した情報を用いて自動運転制御を行う自律型自動運転に加えて,V2I(Vehicle-to-Infrastructure)通信やV2V(Vehicle-to-Vehicle)通信によって取得した情報を活用することで,状況の予測や周辺車両との協調を可能とする車両のことである.V2V通信は,将来的な協調型自動運転車両の普及に伴って,合流支援で活用されることが期待されている.合流時の調停手法としてV2I通信とV2V通信を併用したクラウド経由の手法が多く考えられているため,V2V通信のみを利用した調停手法については検討の余地が多い.そこで,本研究では走行する全車両が協調型自動運転車両である一車線高速道路におけるV2V通信のみを用いた合流時の調停手法を複数提案し,各手法の比較と評価を行う.
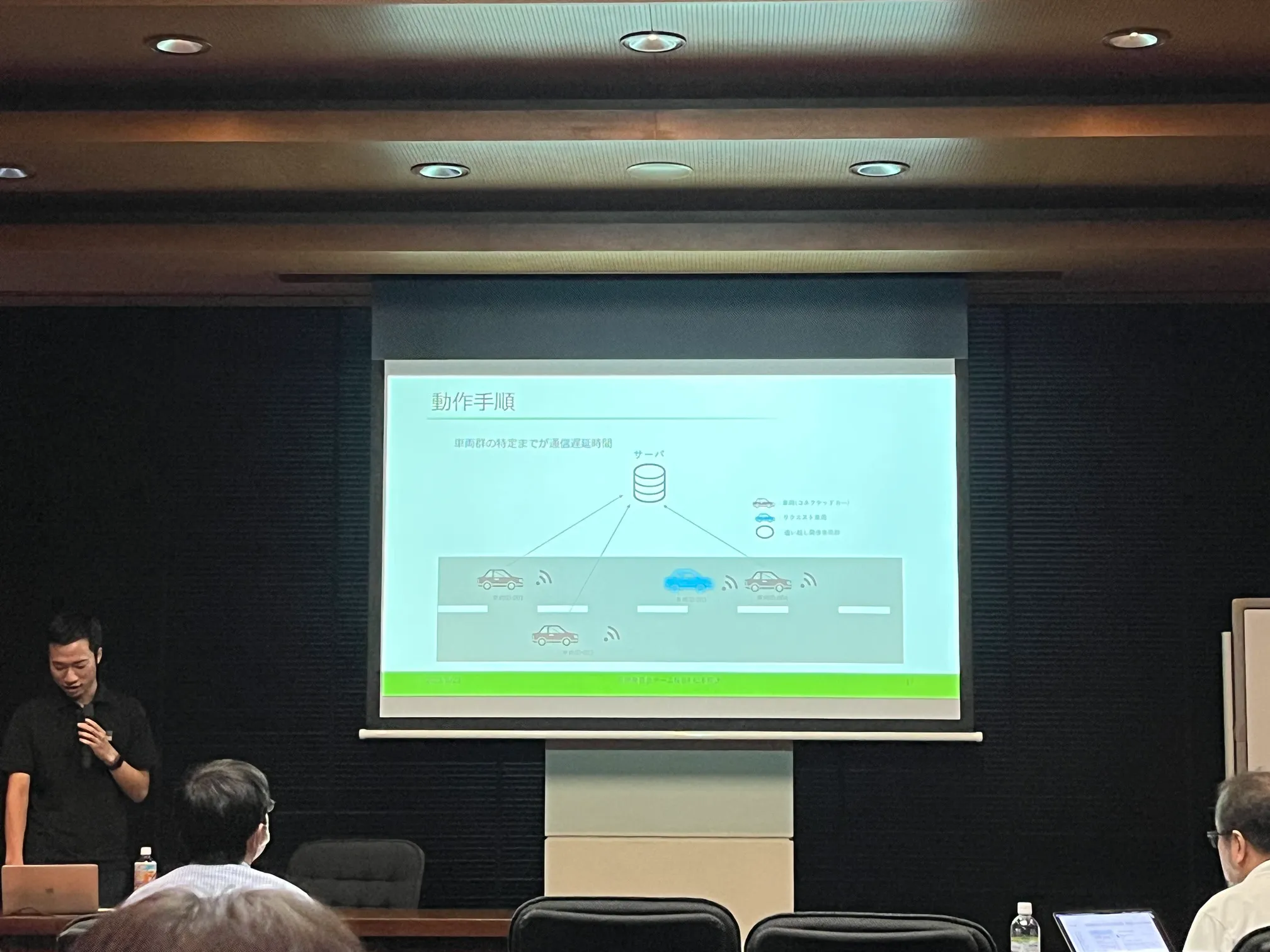
OpenFlow を用いたV2V・V2N 通信の併用によるコネクテッドカーの通信品質向上(田牧浩月)
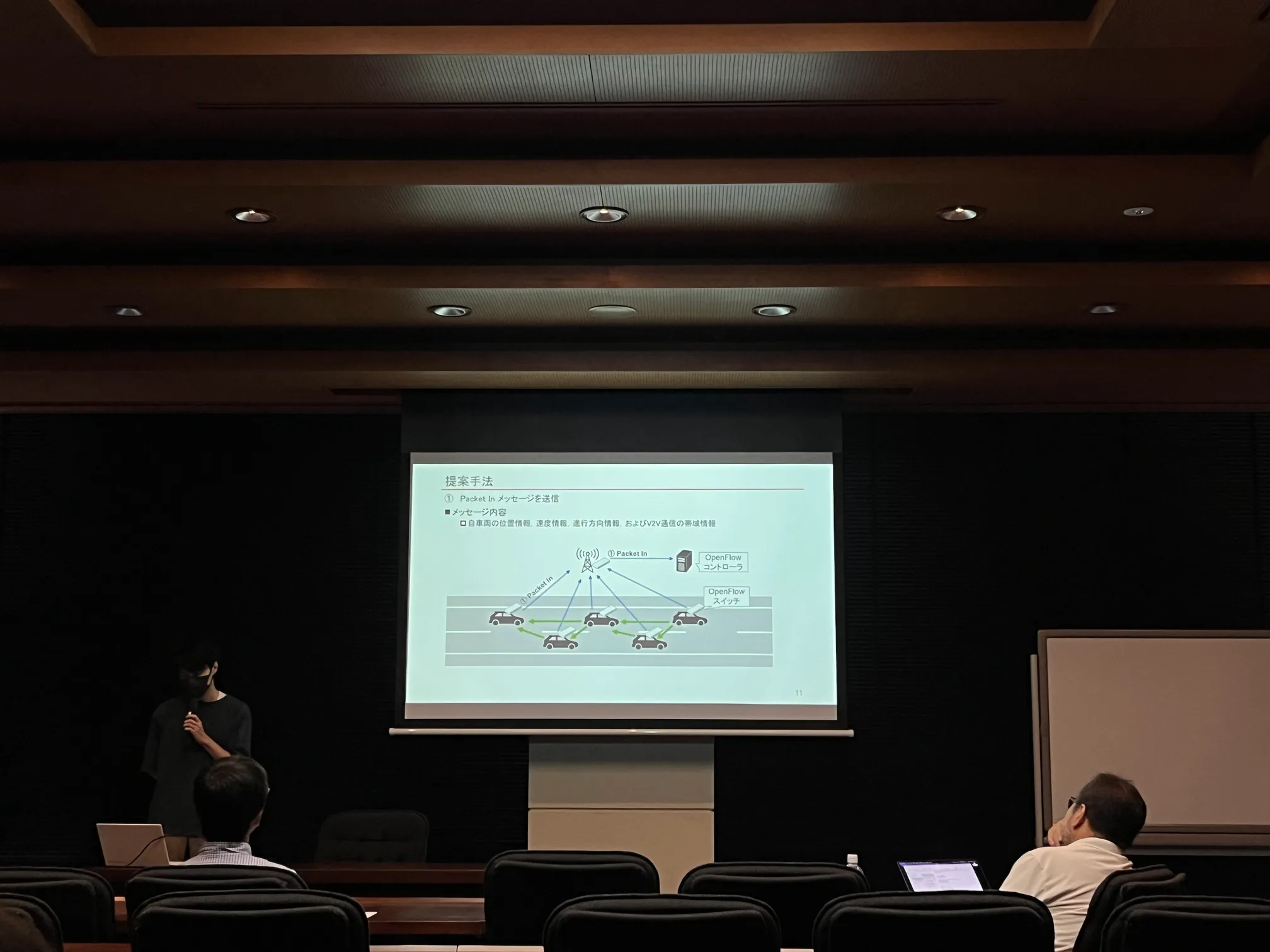
近年,ITS(高度道路交通システム)の研究において,安全運転支援やコネクテッドカーのための通信ネットワークに関する研究が活発に行われている.V2V(Vehicle-to-Vehicle)通信およびV2N(Vehicle-to-Network)通信は,車両同士および車両とネットワークインフラとの間で情報を交換するための主要な通信技術となっている.特に車両間の急停止や急減速時の衝突回避支援などの通信には,高速な通信が求められる.V2V通信では,高速で低遅延通信を行うことができる.しかし,周辺車両が多数存在する場合は,全ての車両がデータを送受信するため,輻輳や電波干渉が発生する問題がある.また,送受信を行う車両間の距離が大きい場合は,マルチホップ通信が行われる.そのため,車両間の距離が大きくなるにつれ,中継する車両台数が増加するため,通信速度が低下し,遅延が大きくなる問題がある.一方で,V2N通信では広域なエリアで高速通信を行うことができる.しかし,通信を行う車両が近距離な場合においても基地局を介した通信を行うため,遅延が大きくなる問題がある.また,通信帯域が狭くなるにつれて通信速度が遅くなり,遅延が大きくなる問題がある.前述の問題点を踏まえて,本研究では,Software-Defined Networkingと呼ばれるネットワーク形態の1つであるOpenFlow技術を用いて,車車間通信を行う際にV2V通信とV2N通信を通信品質に応じて動的に変更することで通信品質の向上を図る.
複数人が移動する環境下における利用者のコンテンツを考慮したMPQUICパケットスケジューラ(東葵)
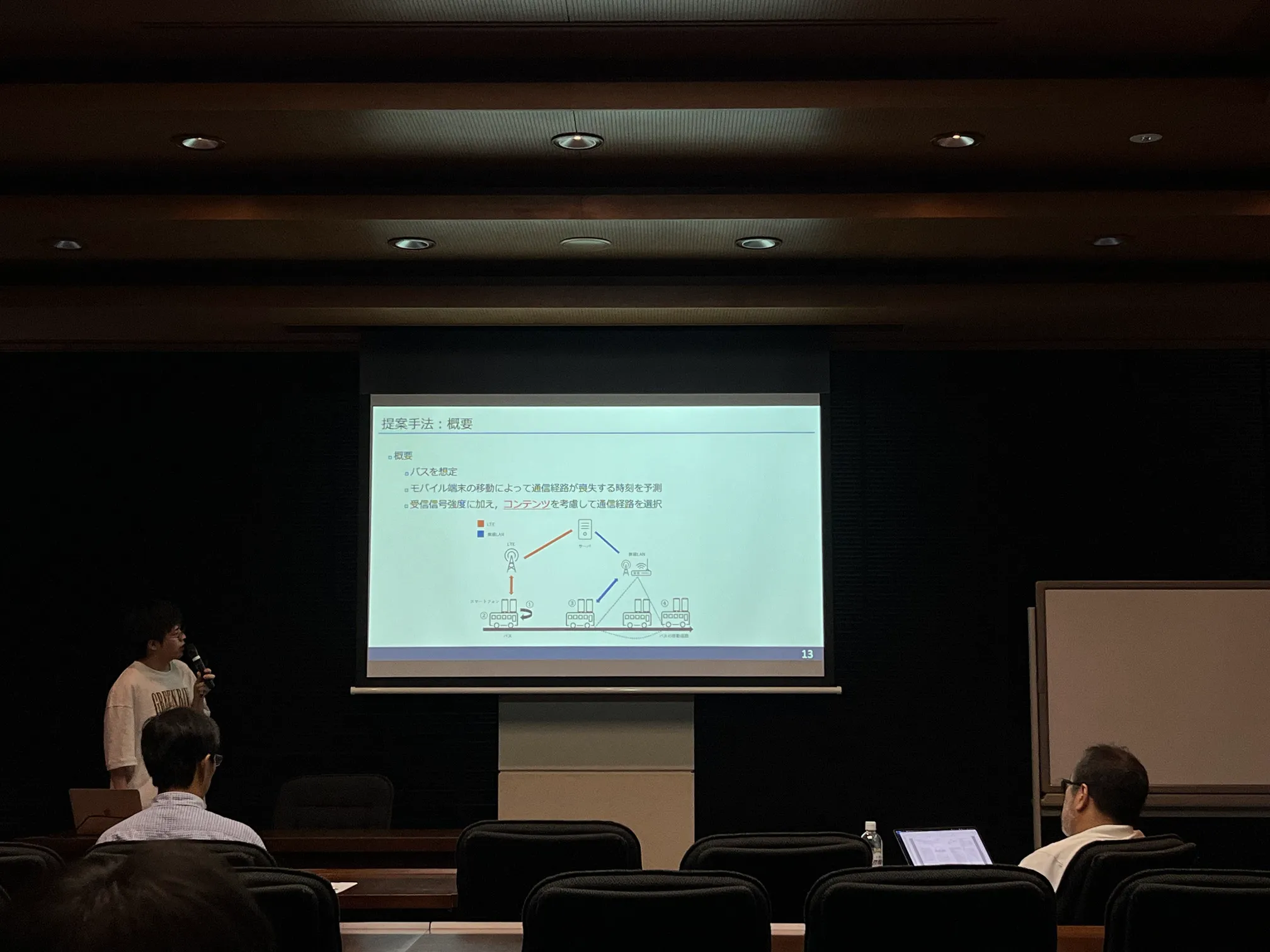
近年,スマートフォンなどのモバイル端末の普及により,公共交通機関や自家用車での移動中にビデオストリーミングやゲームなどのコンテンツを利用する機会が増えている.これらのコンテンツを快適に利用するためには,パケットロスや通信の遅延などが発生しないように,通信帯域を確保することが必要となる.そこで,LTEなどのセルラー通信と無線LANといった複数の通信を同時に使用することが可能なマルチパストランスポートプロトコルという技術が用いられている.マルチパストランスポートプロトコルは,パケットスケジューラによってパケットがどの通信経路へ送信されるか決定される.しかし,既存のパケットスケジューラはモバイル端末の移動による通信経路の喪失を考慮していない.そのため,移動による通信経路の損失によってネットワーク上を伝送中のパケットであるInFlightパケットがモバイル端末に到達できず,パケットロスが発生する.既存研究には移動環境を考慮したパケットスケジューラも存在するが,利用者のコンテンツは考慮されていない.そこで本研究では,移動経路,受信電波強度,利用者のコンテンツに基づいて通信経路を選択することで,移動環境に応じた通信経路選択を可能とし,InFlightパケットによるパケットロスを削減する手法を提案する.
車載LiDAR の歩行者検知におけるビーコンを利用した歩行者数判定手法(辰己弘征)

近年,LiDAR(Light Detection And Ranging)による位置推定技術が注目されている.LiDARはレーザー光を使用して物体までの距離や位置を計測し,物体の位置や形状を点群データとして取得するセンシング技術である.これを車両に搭載し,周囲の点群データを解析することで,それが歩行者であるのかそうでないのかを判別することが可能である.しかし,一つの視点による歩行者検知では死角領域が発生するため,全ての歩行者をもれなく検知するのは不可能である.これを不知覚問題という.この問題に対して橋本らは,交差点内の複数路側機が取得した歩行者の点群データを統合することで,死角領域を補う試みが行ったが,歩行者が重なっている場合や,近くに複数人存在する場合などは,点群が一人分しか表示されないと言う問題があるため全ての歩行者の人数を正確に把握することができないと言う問題があった.そこで本研究では,Bluetooth5.1を搭載したビーコンタグを歩行者に持たせ,交差点にロケーターを設置することで,車載LiDARのみで検知したときよりも歩行者数を正確に判定し,車載LiDARで検知できなかった歩行者を補うことを目的とする.
時空間グリッド予約における車線変更を考慮した道路合流調停手法(梅田寛斗)

自動運転技術に関する研究において,通信を用いて車載センサ情報を他車両と共有して走行する協調型自動運転が検討されている.協調型自動運転における走行調停手法として,ダイナミックマップを利用した時空間グリッド予約が提案されている.道路上の空間と時間をグリッドに分割し,各車両がどの時間にどのグリッドを走行するかをダイナミックマップ上で管理する.先行研究では,高速道路における走行調停においてこの手法を適用することによって合流時の車両の加減速が緩やかになり,安全性や走行効率が向上することを示した.しかし,この研究では高速道路の本線での車線変更について考慮しておらず,広域での走行調停ができるという時空間グリッド予約のメリットを活かしきれていない.そこで本研究では,より効率的な高速道路の合流調停を目的とし,高速道路の本線における車線変更を考慮した走行調停の手法を提案する.
V2V・V2I 通信遅延を考慮した高速道路上の車線変更における車両走行調停手法(松本翔汰)
近年,自動運転技術の発展により,快適な移動環境が整ってきている.従来の運転行動では,運転者がすべて操作を行なっていたが,運転支援という形で,自動ブレーキや車線維持などの技術が開発され,社会に普及している.また本年から自動運転レベル4が解禁され,各省庁や地方自治体の協力を得て実証実験等が行われている.さらなる安全な車社会の実現のために,協調型自動運転の研究も行われている.これまで,自車両のみのセンサ情報で周囲の環境情報を取得していたが,他車両やネットワークを介して周辺の状況を共有,認識する.情報の共有および認識のための通信手法として,V2X通信がある.V2X通信には,車車間通信であるV2V(Vehicle-to-Vehicle)通信,自動車と道路側のインフラ間の通信であるV2I(Vehicle-to-roadside-Infrastructure)通信,自動車と歩行者間の通信であるV2P(Vehicle to Pedestrian)通信,自動車とネットワーク間の通信であるV2N(Vehicle to Network)通信がある.V2X通信を使用する際,共有する情報の精度や信頼性の確保が重要になっている.そこで,本研究では,高速道路走行中の車線変更をV2I(Vehicle-to-roadside-Infrastructure)通信とV2V(Vehicle-to-Vehicle)通信の遅延を考慮した上で,信頼性および安全性を担保できる適切な車間距離をシミュレーションによって検討する.
ホームネットワークにおけるIoT 機器管理を目的としたコンテナオーケストレーションシステム導入の検討(田中誠也)
近年,IoT(Internet of Things)機器の普及が進んでいる.特に一般家庭においても,家電のIoT化等により,家庭内に構築したLAN環境であるホームネットワーク内のIoT機器が増加している.それと同時に,IoT機器のセキュリティも問題となっている.IoT機器のセキュリティが問題になりやすい理由として,メーカにより十分な監視手段が提供されない場合が多い事,ソフトウェアのアップデートが行いにくい事により既知の脆弱性の修正が早急に行われない事が挙げられる.IoT機器の管理やアップデートの簡易化を目的として,各社が自社製品の管理用のアプリケーションを公開している.しかし,それらのアプリケーションは自社製品専用であるため,機器が増えるほど対応するアプリケーションも増えて利用者による管理が難しくなる.そこで,本研究では,家庭内のIoT機器の管理やソフトウェアアップデートが困難であるという問題点に対して,ホームネットワークにおいて仮想環境のクラスタ管理ソフトウェアであるコンテナオーケストレーションシステムを導入し,共通の管理用通信プロトコルを制定することでIoT機器を一元管理を可能とする手法を提案する.