2021年9月1日の三研究合同中間発表発表会(M2)において,中田 輝(M2),東山 紘樹(M2),林 聡一郎 (M2),田中 佳輝(M2),細野 航平(M2),奥西 理貴(M2),中井 綾一(M2),上原 夏紀(M2)の8名が以下のタイトルで発表を行いました.
時空間グリッド予約を実現するマイクロロードプライシングのブロックチェーン管理による高速化(中田 輝)

近年,静的な地図上に動的な情報を重ね合わせた仮想的なデータベースであるダイナミックマップに関する研究が 進められており,協調型自動運転車両の走行調停において重要な役割を果たすと期待されている.その応用として, このダイナミックマップを利用することによって,自動運転車がこれから走行をする経路の時間と空間を事前に予約し,他の車両を排除することでよりスムーズな走行を可能にする時空間グリッド予約という考え方を確立した.この際,ダイナミックマップでの時空間グリッド予約に料金徴 収による優先度を設けるために,道路をグリッドに分割しそれぞれに値段を付け仮想通貨によって支払いを行うマイ クロロードプライシングという方式を考え,その実現性についての検証を行った,その結果,交差点などの限定的な 範囲での実現可能性が示され,ガソリン税に代わる新たな収入源の確保としても期待できることが分かった.
本研究ではこれを発展させ,予約情報の管理をブロックチェーン上で行うことで予約の処理と予約料金の支払いを分離する.これにより,提案するシステムを高速化し,より広範囲での実現を目指す.
ダイナミックマップの時空間グリッド予約による道路合流調停手法(東山 紘樹)
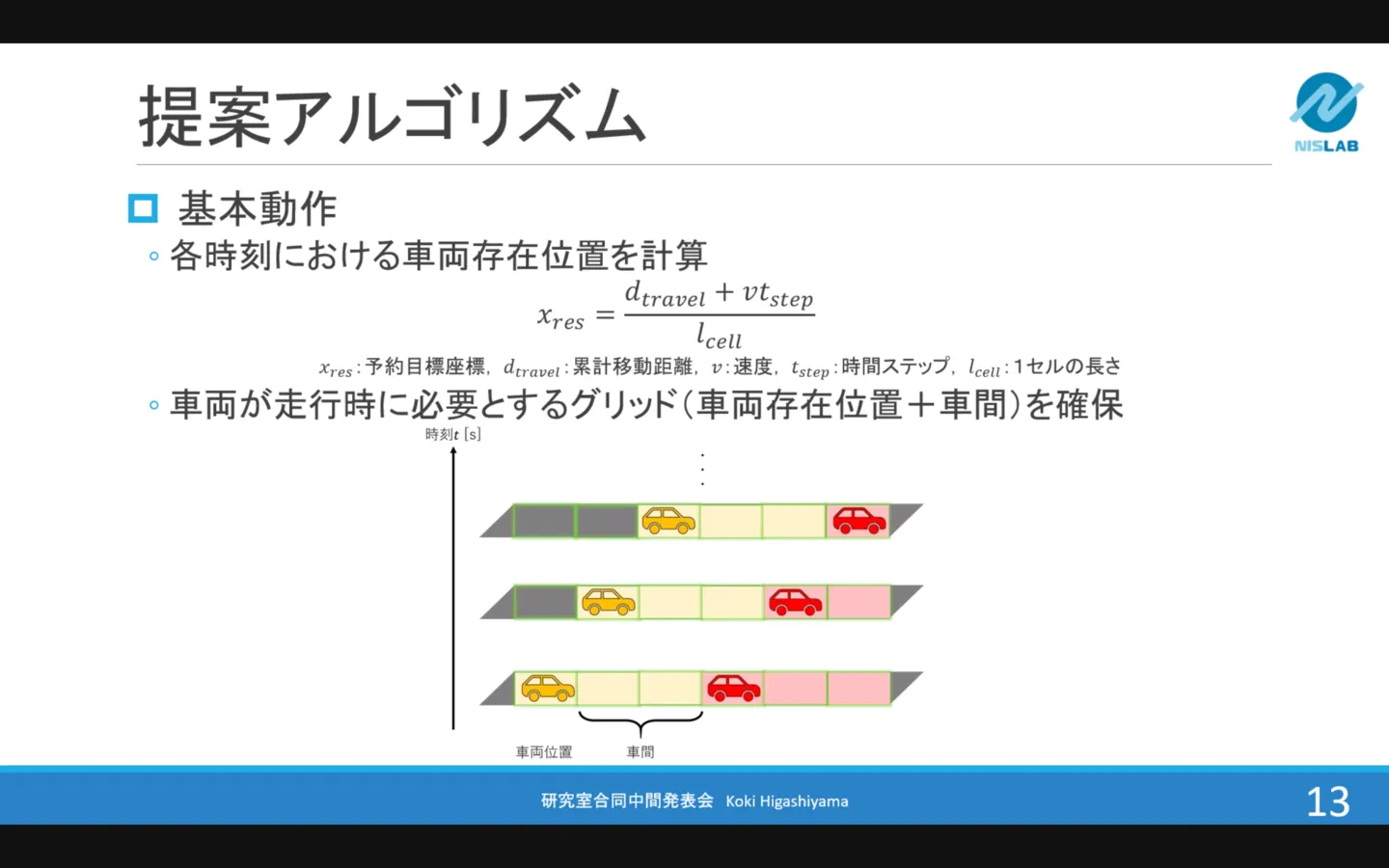
近年,自動運転に関する研究が盛んにおこなわれている. 車両が自らのセンサで周囲の状況を把握し自律的に自動走行を行うものに加えて,通信を用いて他の車両やインフラと情報を共有して協調型自動運転を実現するコネクテッドカー(Connected Autonomous Vehicles)についても検討が進められている.
コネクテッドカーの走行調停手法としてダイナミックマップ(DM)による時空間グリッド予約の利用が検討されている.DMとは動的な車両情報から静的な道路情報までを階層化して一元的に管理するプラットフォームである. DM上の道路空間が予め定められた大きさのセルに区切られており,時刻と各セルの集合体を時空間グリッドと定義し,DM のデータベース上で管理されている.コネクテッドカーは前方の数百メートルの区間について走行し始める予定時刻の数秒前に予約をDMにリクエストする.DMは他車両の予約と衝突が生じないように処理を行い,取得できた予約に基づきパスプラン(走行計画)が立てられる.このように,車両が走行しながら前方の区間の予約リクエストを送り,得られたパスプランに従って走行することを繰り返す.
先行研究ではこの基礎となる仕組みを単一交差点を想定して構築し,通信における計算量や旅行時間において考察 が行われ,他の通信を用いる走行調停手法に比べて有用である可能性を示した.しかし,車両挙動が考慮されていないなどの改善の余地がある.本研究では,アルゴリズムを改良し,高速道路を想定した合流部での調停について検討する.
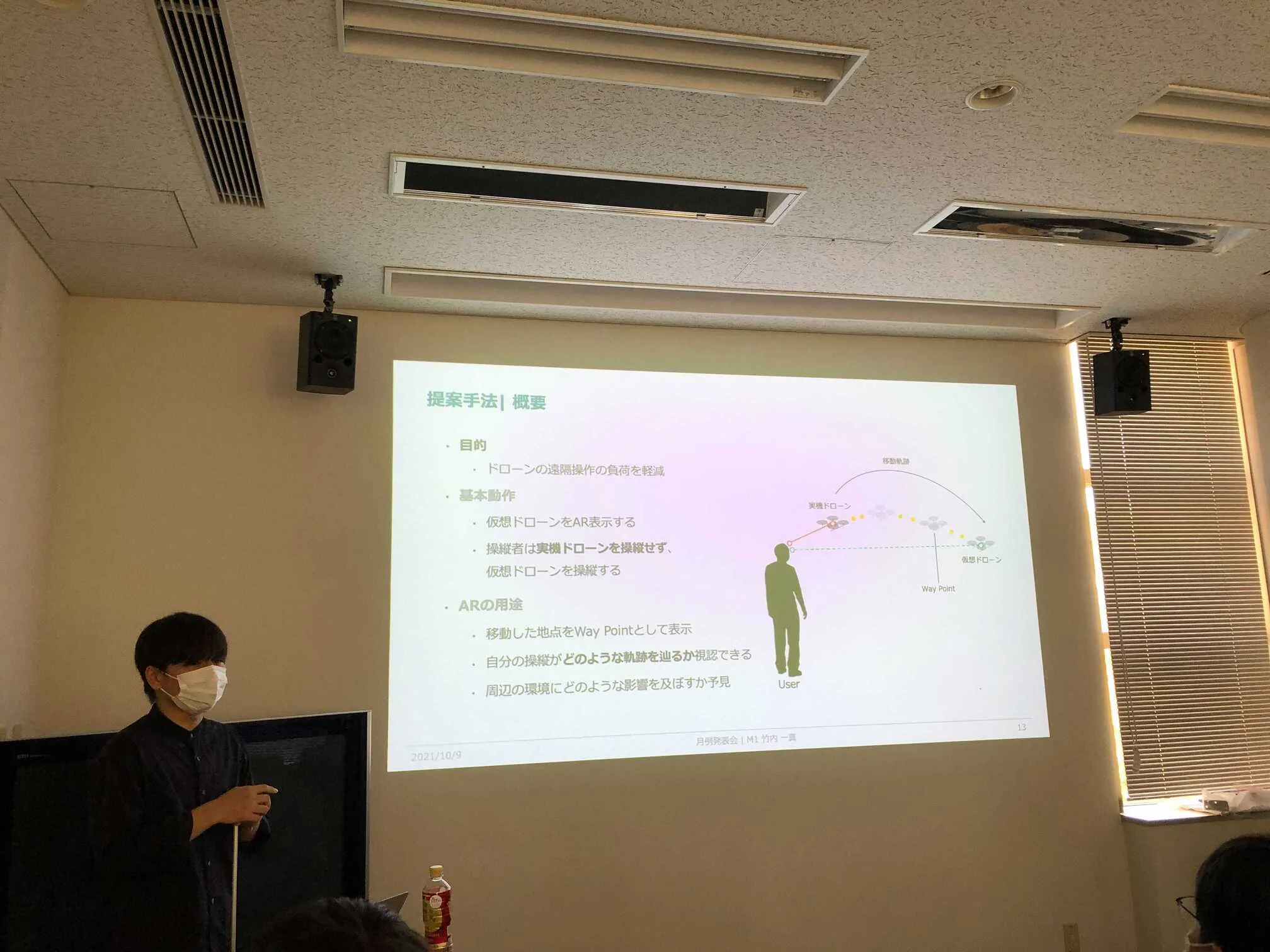
安全運転支援のための AR を利用したフリースペースの段階的可視化手法(林 聡一郎)
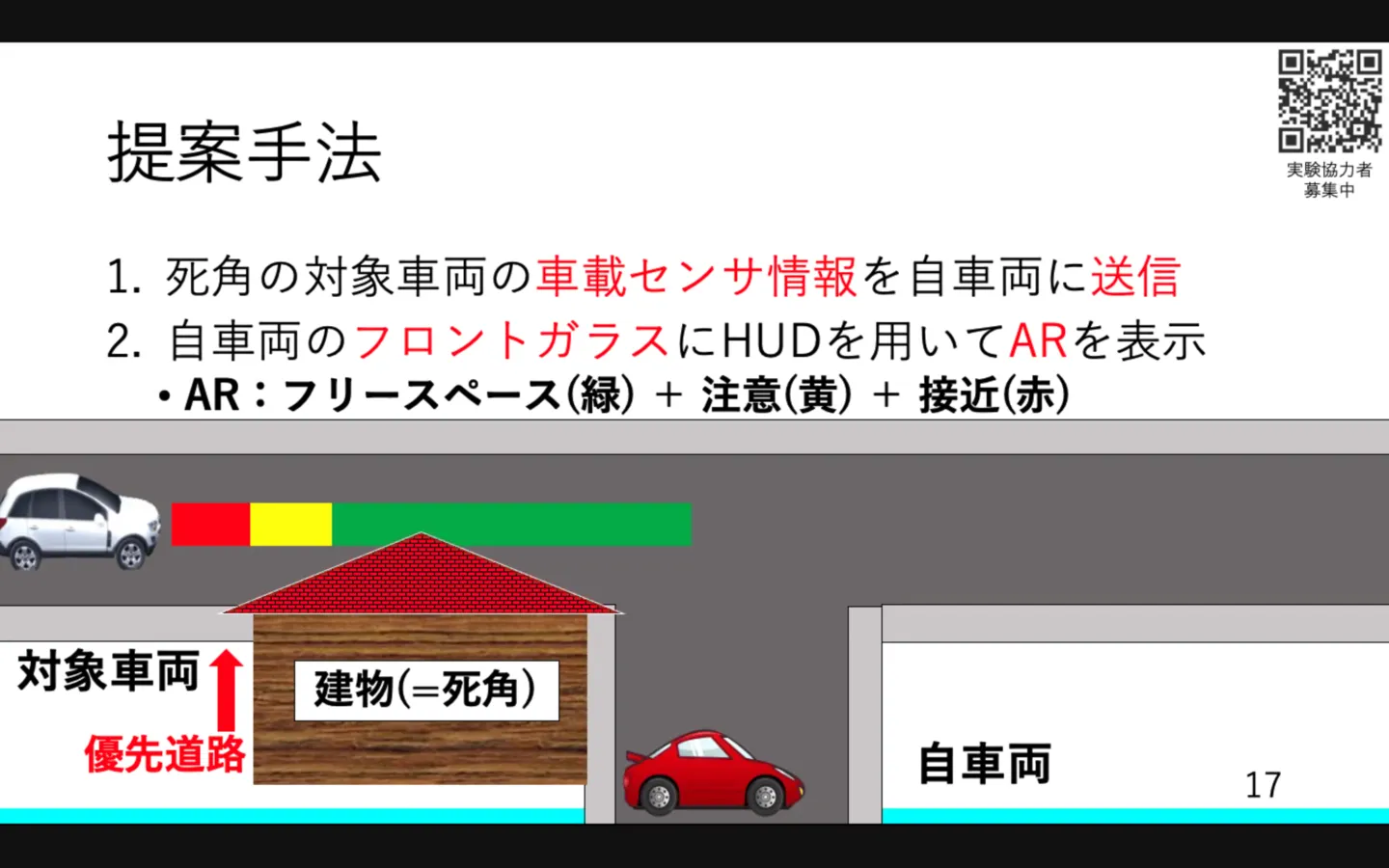
自動車同士の事故が全体の事故の約 9 割を占めている. 自動車同士の事故の中でも,出会い頭の衝突が約 3 割,右 折時の衝突が 1 割であり,この出会い頭の衝突と右折時の 衝突の原因の 1 つとして死角の存在が考えられる.
既に,交通事故を回避するために車両のフロントガラス に AR を重畳する HUD(Head Up Display) や車内に設置する HDD(Head Down Display) といったされたディスプレイ がある.その HUD や HDD を用いて視覚的警告や聴覚的 警告,視覚と聴覚を組み合わせた警告の提示が可能である. 視覚的警告では,様々な交通状況に対して様々な AR による可視化が検討されている.例えば,死角の交差点のように見通しの悪い道路環境において死角の対象車両の接近について自車両のドライバに提示する AR について検討されている.
走行情報と顔方向に基づくドライバーの歩行者に対する認識の推定(田中 佳輝)
近年,高度道路交通システム(ITS:Intelligent Transport Systems)の分野において研究開発が活発に行われ,様々な運転支援システムが普及してきている.その中の1つに 衝突回避支援システムがあり,ドライバーに対して警告や自動ブレーキなどの制御を行うことで,ドライバーの安全運転を支援するというものである.このシステムは,車両に搭載されたカメラやミリ波レーダーなどのセンサを利用 し,車両や歩行者などの対象物との距離や相対速度をセンシングすることで実現される.このようなシステムはすでに実用化されており,交通事故を未然に防ぐことやその被害を軽減することに貢献している.また,車車間通信や歩車間通信によって,周辺の車両や歩行者との位置情報や速度情報などの共有が可能となり,それらの情報を利用した協調型運転支援システムの研究が行われている.このようなシステムでは,カメラやミリ波レーダーなどのセンサによるセンシングのみでは得られない情報を利用した運転支援が可能となり,ドライバーにとって,より効果の高い運転支援が実現できると期待されている.
しかし,現在検討されている協調型運転支援システムは, ドライバーの周辺環境に対する認識状態を考慮した運転支援を行っていない.例えば,周辺に存在するすべての歩行者を気付かせるような警告を行った場合,ドライバーが既に認識している歩行者に対しても警告することになり,慣れによる効果の低下やシステムに対する過信,煩わしさといった問題が発生する.そのため,ドライバーの歩行者に対する認識状態を推定することができれば,効果的な情報提供の手法を検討することが可能となる.
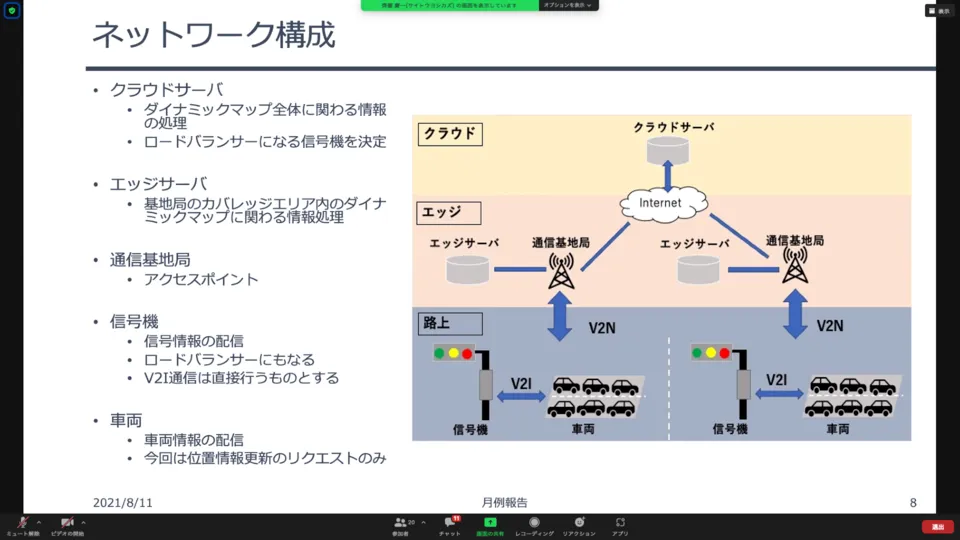
ダイナミックマップシステムにおける複数エッジサーバへの効率的アクセス方式(細野 航平)
車両に搭載されたセンサにより走行環境を認識し,ドライバへの警告や自動で危険を回避する安全運転支援システムや自動運転システムなどの研究が加速している.しかし,車両単体からセンサで認識できる範囲は限定的であり, 道路上に存在する周囲の車両や道路インフラ装置のセンサが検出した情報を,通信を介して共有し,認識できる範囲を拡張することが重要な課題となっている.
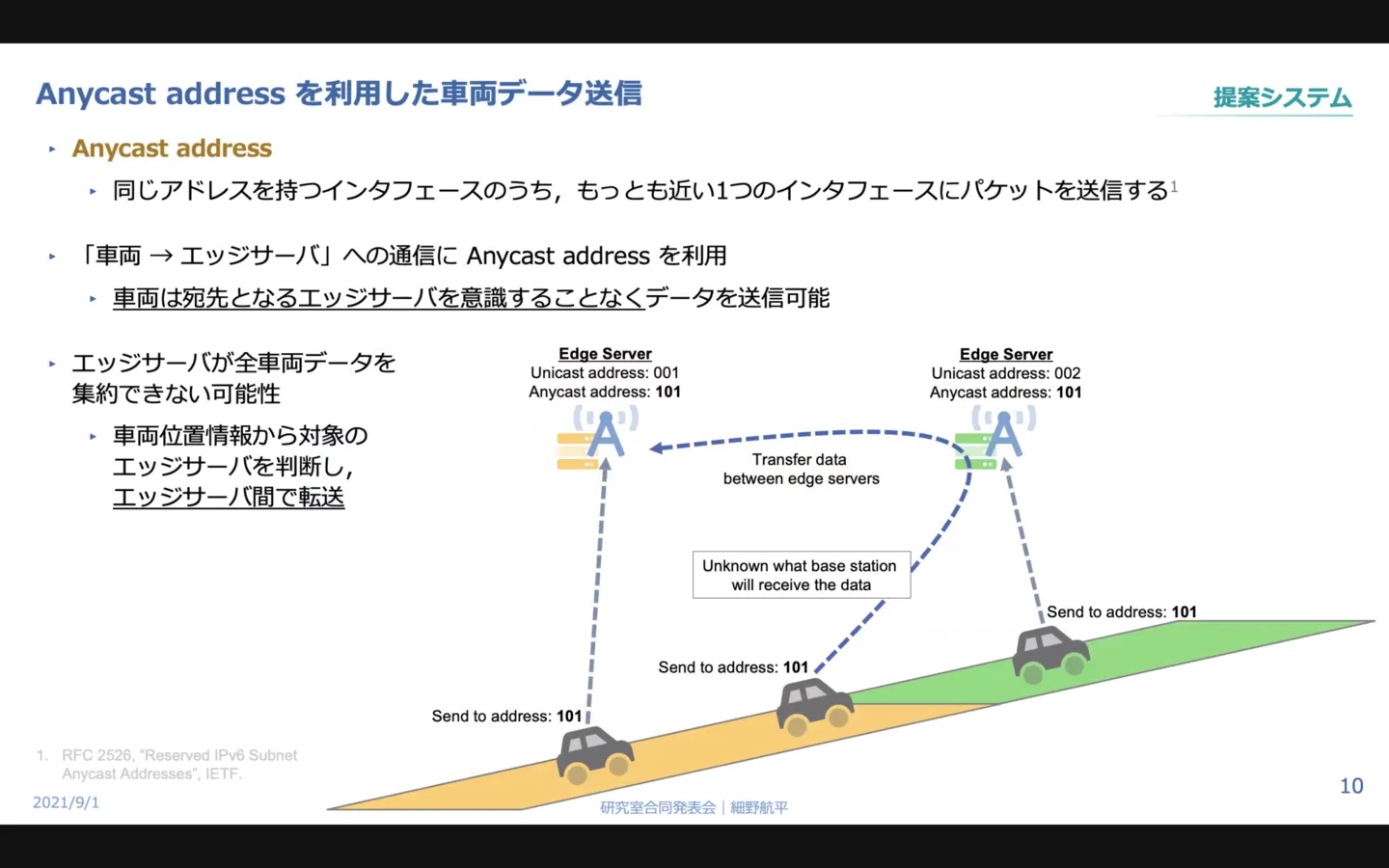
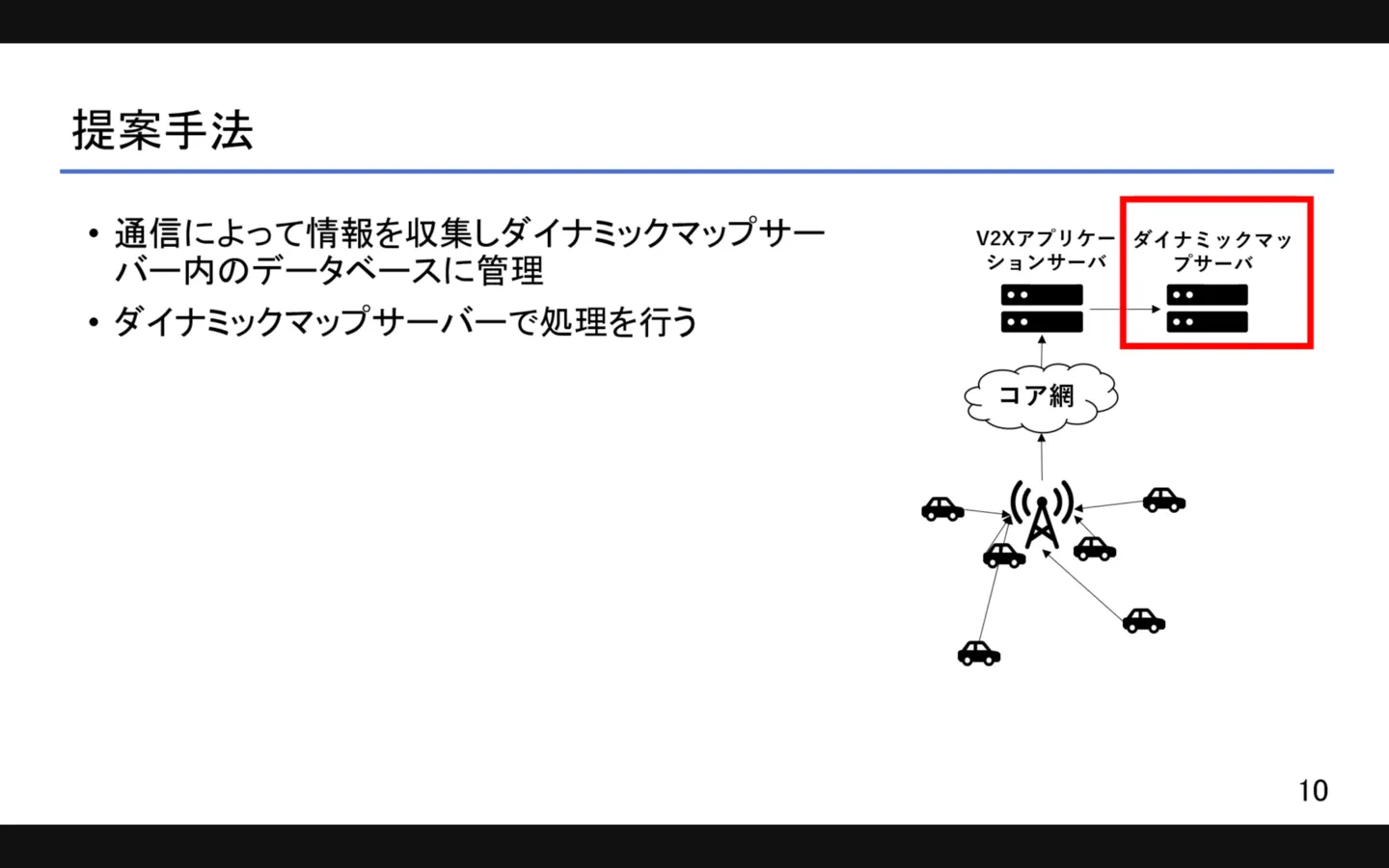
ダイナミックマップは,高精度道路地図とセンサ情報に対して,収集・検索などデータ管理のために必要となる機能を提供し,交通サービスを提供するアプリケーションの開発・実行を行うことが可能となる.ダイナミックマップの動的情報として,一般に100ミリ秒周期で車両から送信されるセンサ情報などが管理される.これに基づいてアプリケーションが動作するため,低遅延での情報処理が求められる.ダイナミックマップはインターネット上のクラウドの利用を想定するが,クラウドに膨大な車両からのデータが集約されると処理負荷や通信遅延の原因となり,スケーラビリティが問題になると考えられる.
そこで,クラウドと車両の間にエッジサーバを配置することで,処理負荷の分散や通信遅延の軽減が期待されている.車両から送信されたデータを,地理的に分散配置されたエッジサーバで逐次処理し,処理結果を車両へと通知 する.しかし,ダイナミックマップにおいて,エッジサーバは車両データをリアルタイムに処理するだけでなく,対象となるエリア内の全ての車両データを集約する必要がある.また,車両から送信されたデータが意図しないエッジサーバに受信された場合は適切なエッジサーバにデータを転送する必要がある.本研究では,クラウドのスケーラビリティの問題を軽減するため,エッジサーバを配置し,道路上を移動する複数の車両に対して効率的なダイナミックマップシステムを検討する.
マルチパス QUIC を用いた移動時の通信経路喪失によるパケットロス削減手法(奥西 理貴)
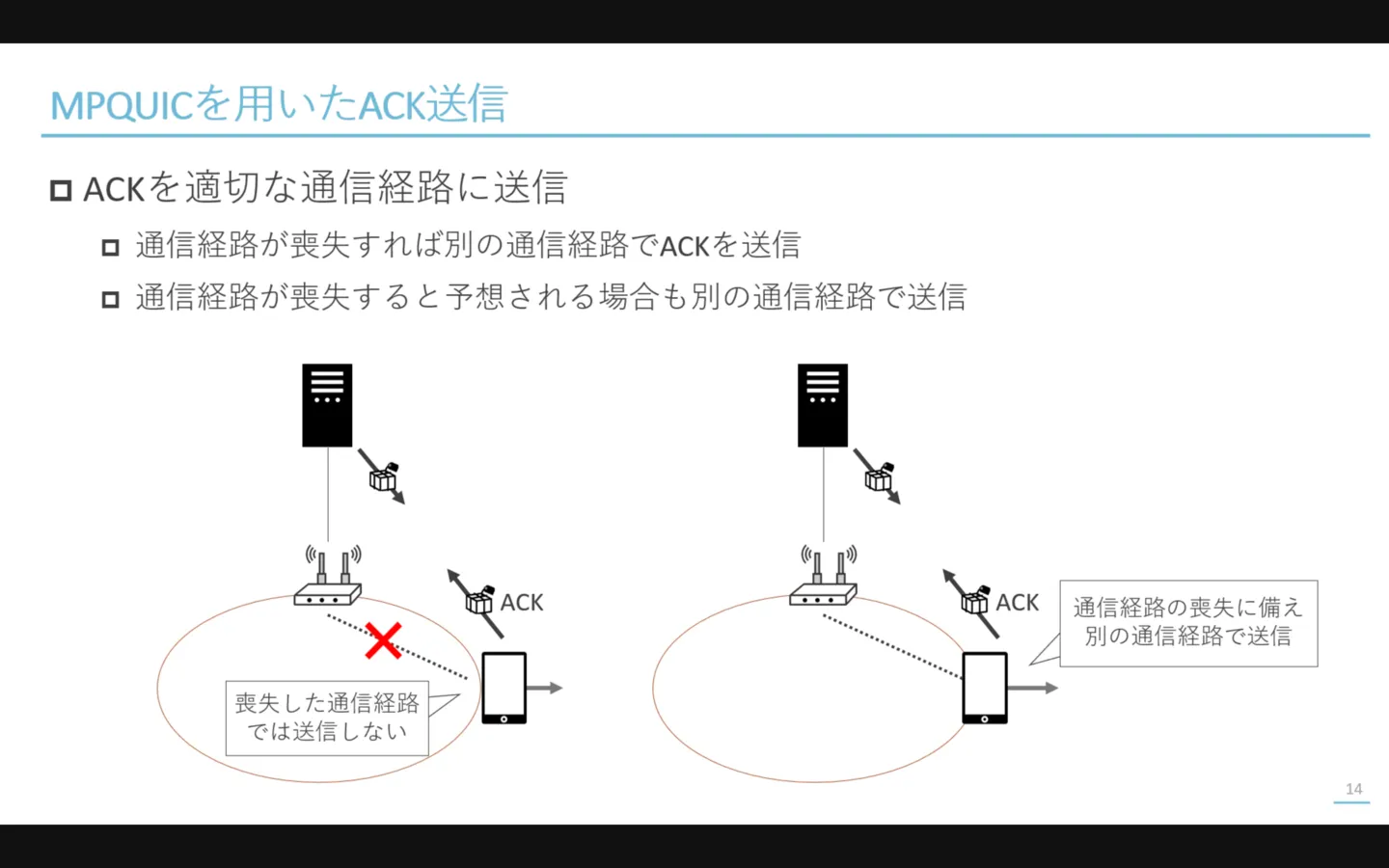
近年のビデオストリーミングなどの大容量コンテンツの 普及に伴い,必要な帯域幅が増加している.不足する帯域 を補うために,スマートフォンやタブレットといった端末 において,LTE や無線 LAN といった複数の通信経路を併 用し利用できる帯域幅を増加させる帯域集約が注目を集 めている.この帯域集約をトランスポート層で実現する技 術として,複数の通信経路に TCP コネクションを確立す る Multipath TCP(MPTCP)が普及し始めている.一方で, 端末の移動性と無線 LAN の通信範囲を考慮すると,無線 LAN での接続は一時的なものとなり,通信経路の喪失が頻 繁に起こることが想定される.しかし MPTCP の抱える本 質的な課題から,通信経路の喪失時に発生するパケットロ スを防ぐことができない.
本研究では,MPTCP に代わって Multipath QUIC(MPQUIC) を用い,喪失が予想される通信経路 でのデータ送出量を適切に調整することによって,通信経 路の喪失に伴うパケットロスを削減する手法を提案する.
V2X 通信プライバシ向上のための周辺車両数に応じた可変仮想車両による仮名方式(中井 綾一)
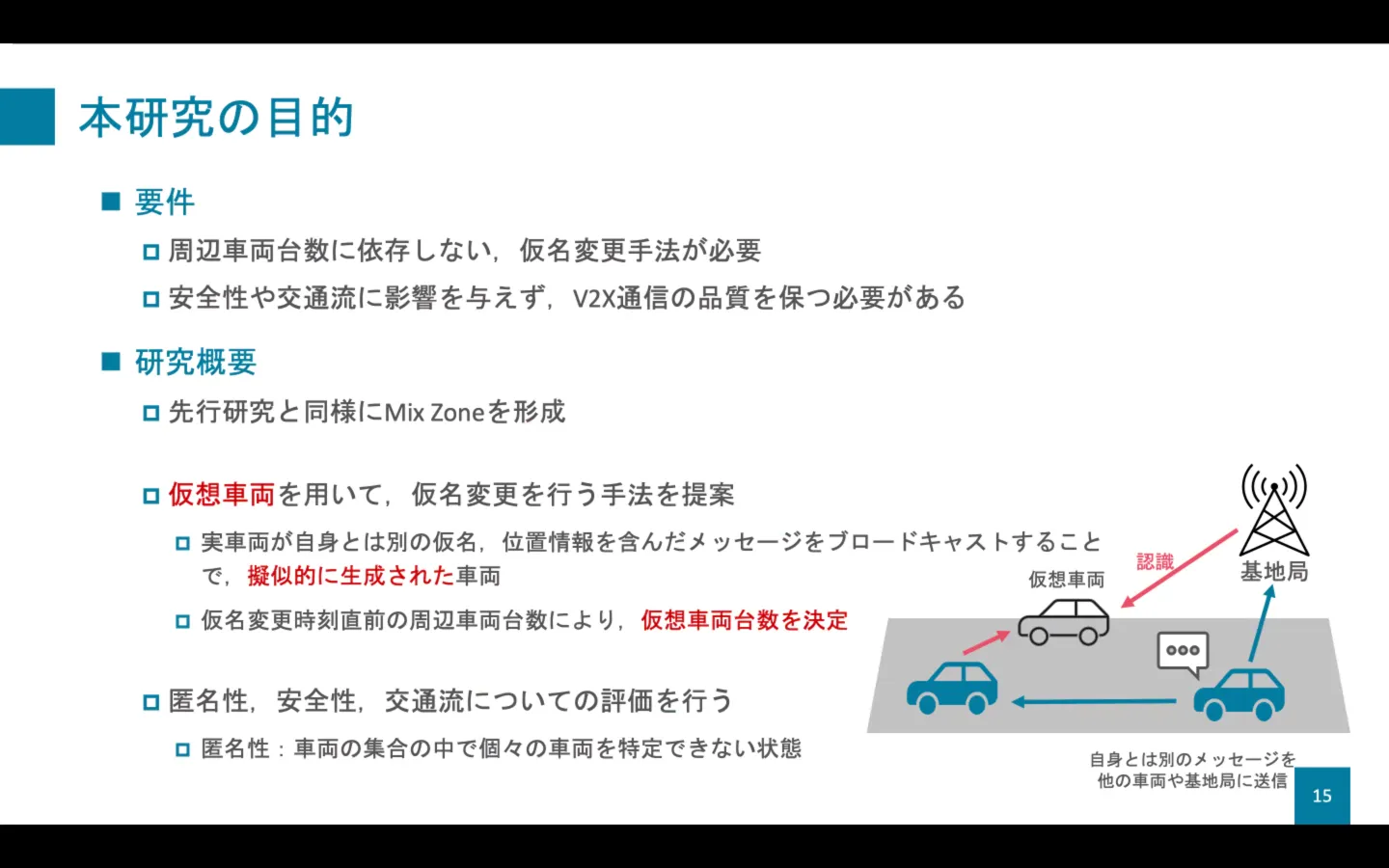
近年,V2X(Vehicle to Everything) 通信に関しての研究が盛んに行われている.この V2X 通信により,車両の事故防止や交通渋滞の削減につながることが期待されている. しかし,V2X 通信を用いたアプリケーションでは,利便性のために,位置情報や個人情報を周辺機器に送信することから,プライバシ保護が重要な課題となる.
例えば,攻撃者に位置情報を含む V2X 通信メッセージを追跡されると,攻撃者は車両の位置追跡を行うことができ,所有者の行動やそこから得られるメタデータ等の把握が可能となる.この課題を解決する有効なプライバシ保護手法として,仮名を用いた手法が知られている.仮名とは,特定の車両の位置情報などを追跡できないようにするため,V2X 通信機器に割り当てられる仮の識別子である. 本研究では,周辺車両台数に応じて,擬似的に生成した仮想車両同士で協調的に仮名を変更することで,攻撃者による位置追跡を困難にさせる手法を提案する.
基地局周辺の混在状況を考慮した車両誘導による V2X 通信の効率化(上原 夏紀)
ITS 高度化や自動運転社会の実現に向けた研究開発が活発している.また,車車間及び車両と路側機を接続する方式の一つとして,セルラー通信方式に基づくセルラー V2X の標準仕様が 3GPP で規格化され,それらの通信技術が ITS・自動運転の高度化に寄与する可能性について,技術 検討や実証実験が進んでいる.上記の技術を用いることで車両間での情報共有に加えて、路側機やネットワーク上の サーバで、車両やインフラ設置センサから収集したデータ、 さらには、既に保有しているでデータにより新たな価値が付与された情報を車両に配信することが期待できる.
Release15 において 5G に向けて 3GPP が新規に規定した無線アクセス技術,NR(New Radio) が策定されるなど,今後は 5G 通信による高速大容量、多数同時接続,超 高信頼・超低遅延通信化が期待される中,現在 5G におけるカバレッジエリアの小ささによるプローブデータ入手の 効率性が課題となっている.
前研究ではダイナミックマップを用いてカバレッジエリアの情報を共有することでプローブデータ入手の効率化を図っているが,一ヶ所に車両が集中する可能性が考慮されていないため QoS が保証されない問題がある. そこで本研究では前研究の仕様に加え,基地局に QoS が保証される最大接続台数を紐付けて管理し,車両に QoS が保証されかつプローブデータが効率的に集められる経路を提供する手法を提案し,それによる交通流の円滑化を評価する.