2021年10月9日の第131回月例発表会(M1)において,竹内 一真(M1),塚崎 拓真(M1),池田 仁(M1),山本 浩太郎(M1)の5名が以下のタイトルで発表を行いました.
AR を用いた時空間表現による仮想ドローン操縦手法(竹内 一真)
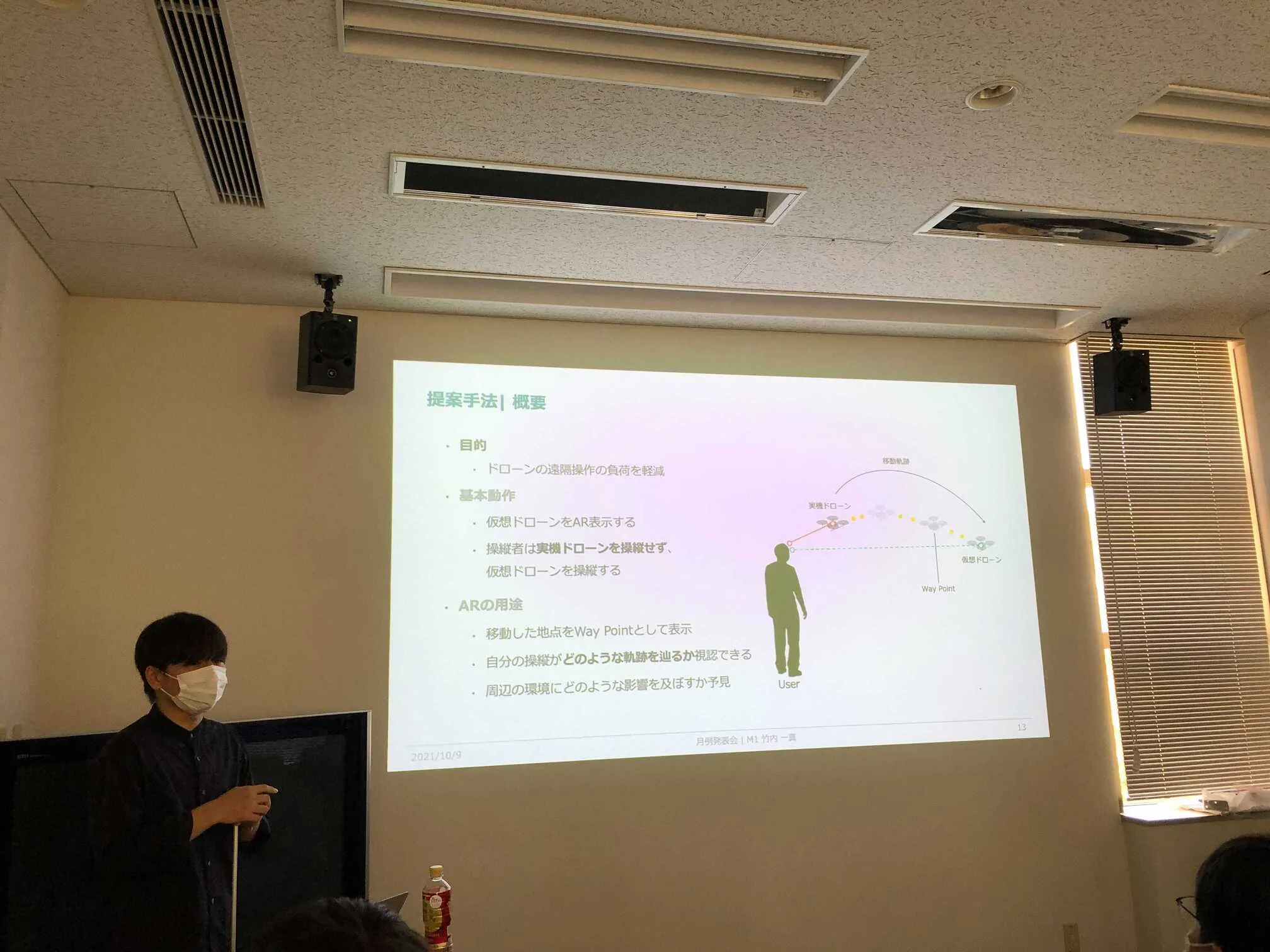
近年,ドローンは空中を移動することで高い機動性を発揮し,建築物や社会インフラの点検まで,幅広い分野で活躍できる機器として注目されている.その中でも,ドローン操縦には自律飛行と遠隔操作の二種類の操縦法が主に使用されている.技術の進歩により,自動的に飛行する自律飛行が注目されつつあるが,人間がドローンを操縦する「遠隔操作」では,人間の意図を直接ドローンに反映できる利点があるため,ドローンを用いて事故を起こすわけにはいかないようなインフラの点検などでは,遠隔操作による操縦が行われている.このように遠隔操作は自律飛行とは異なり,より緊密に操縦者の操縦意図とドローンの動作を結びつける,細かい作業を行うような場面で利用される.しかし,遠隔操作には操縦者の技量、や,高い集中力を要するため,ドローンと障害物の距離の推定や,ドローンの向きや姿勢,どのような動きをするかの推定など,遠隔操作を行いながら他の作業を行うことが困難である.そこで,本研究では操縦者が遠隔操作を手軽に行えるような新しいインタフェースを提案する.具体的には,AR(AugmentedReality)の技術を活用することで,現実のドローンに加えて仮想的なドローンを表示させる.仮想ドローンと操縦者のインタラクションにより,操縦者の技量や高い集中力を軽減した遠隔操作を提供できるか検討する.
ホームネットワークにおける SDN による仮想デバイスを用いたセキュリティプラットフォームの検討(塚崎 拓真)
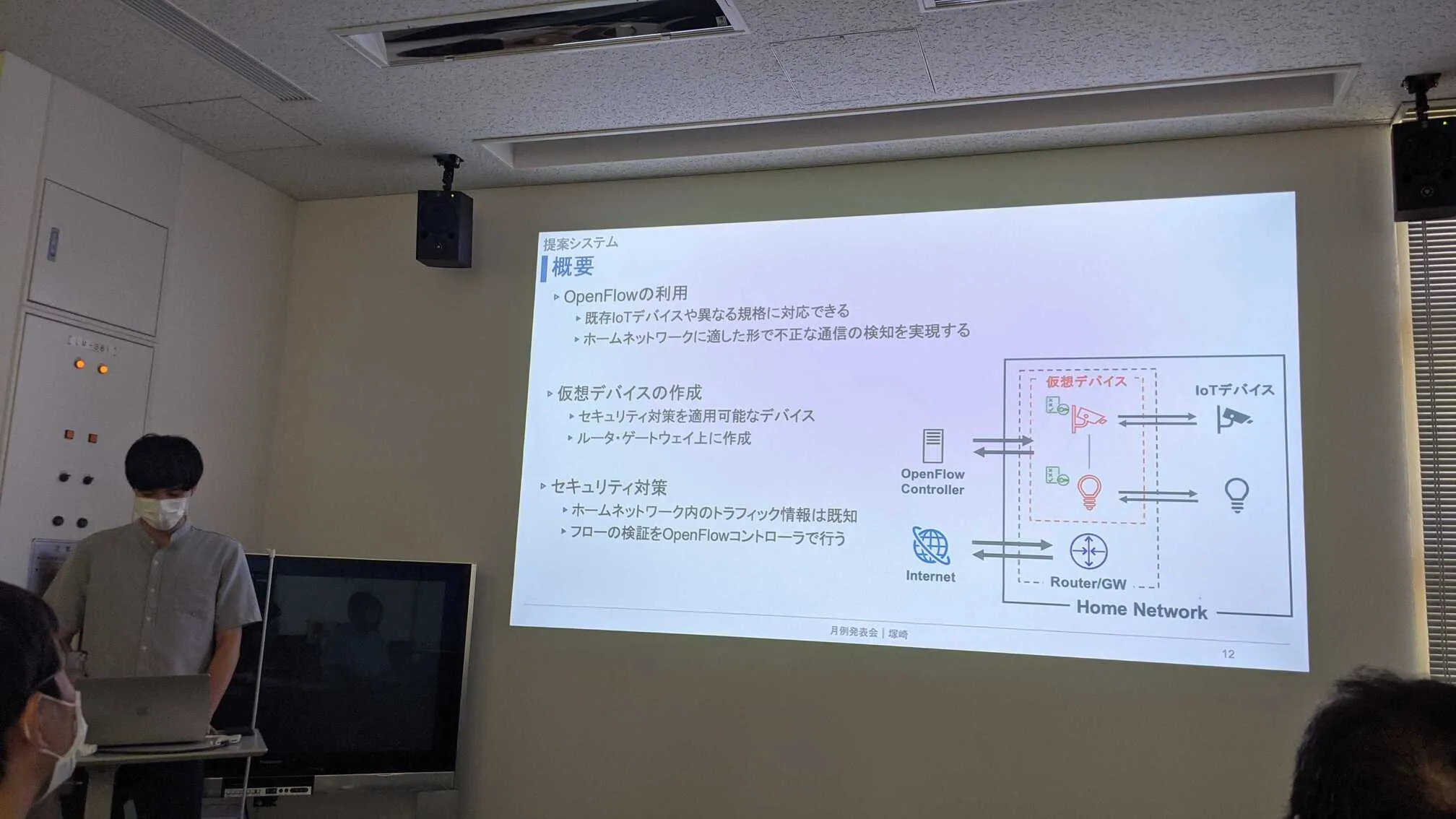
近年,IoT(Internet of Things)が注目を集めるようになり,今後あらゆるモノがネットワークに接続され,利用されることが予想される.それに伴い,ネットワーク内には様々な端末や機器(まとめて,デバイス)が混在することになり,ホームネットワークの形態は多様化していくと考えられる.しかし,IoTの発展で利便性が高まる一方で,これまでネットワークに接続されていなかったモノが接続されることにより,セキュリティ上のリスクも高まっている.IoTデバイスは十分なセキュリティを考慮せずに開発されたものが多いため,悪意のある攻撃者によるサイバー攻撃の標的になりやすい.セキュリティ上の脅威が各種デバイスに顕在した場合,個別に対処するとコストや時間がかかってしまうため,脅威に対し一括に対処する必要がある.しかし,ホームネットワーク内には異なる規格のハードウェアや様々なアプリケーションが混在しているため,それら全てに対応したシステムの構築や更新を続けるのは困難である.そのため,ホームネットワーク内で通信するのであれば,どのデバイスも必ず利用するネットワークを利用したシステムを構築することが望ましい.本研究では,SDNを用いて,ホームネットワークに適した形での不正な通信の検知を検討する.
ROS2 を搭載した小型 UAV の協調制御による 3 次元空間マッピング手法(池田 仁)
近年,UAV(Unmanned Aerial Vehicle)が農業,インフラ点検,運送業など多くの産業分野で注目を集めており,研究開発が盛んに行われている.UAVの自律飛行において,屋外ではGPSを用いた位置計測が一般的であり,GPSの受信が困難である屋内環境や橋梁では自律飛行が困難であるという問題点があった.その問題を解消するための技術としてSLAM(Simultaneous Localization and Mapping)というものがある.SLAMは,GPSが使用できない場所でも自律飛行ができる自己位置推定と3次元空間マッピング技術であり,原発事故で人が立ち入れない原子炉建屋内での調査飛行,トンネルの点検,インフラ設備の点検など,さまざまな応用分野で用いられている.SLAMはLiDARやカメラ,IMU(Inertial Measurement Unit)などからのセンサ情報を元に自己位置推定と周辺のマッピングを行う.そのため,UAVが搭載しているセンサ情報処理機構の性能によって,自己位置推定やマッピングをするのにかかる時間が大きく左右される.現在,UAVのセンサ情報を処理するものとして,一般的にROS(Robot Operating System)が用いられている.しかし,ROSには単一のものしか制御できない,通信のリアルタイム性が低いなどの問題点がある.そのため,ROSを搭載したUAVでは,単一のUAVで3次元空間をマッピングすることになり時間がかかってしまう.そこで本研究では,ROS2(RobotOperatingSystem2)を用いることによりUAVを複数制御し,リアルタイムに通信を行うことにより,SLAMによるマッピングをより効率的に行う手法を検討する.
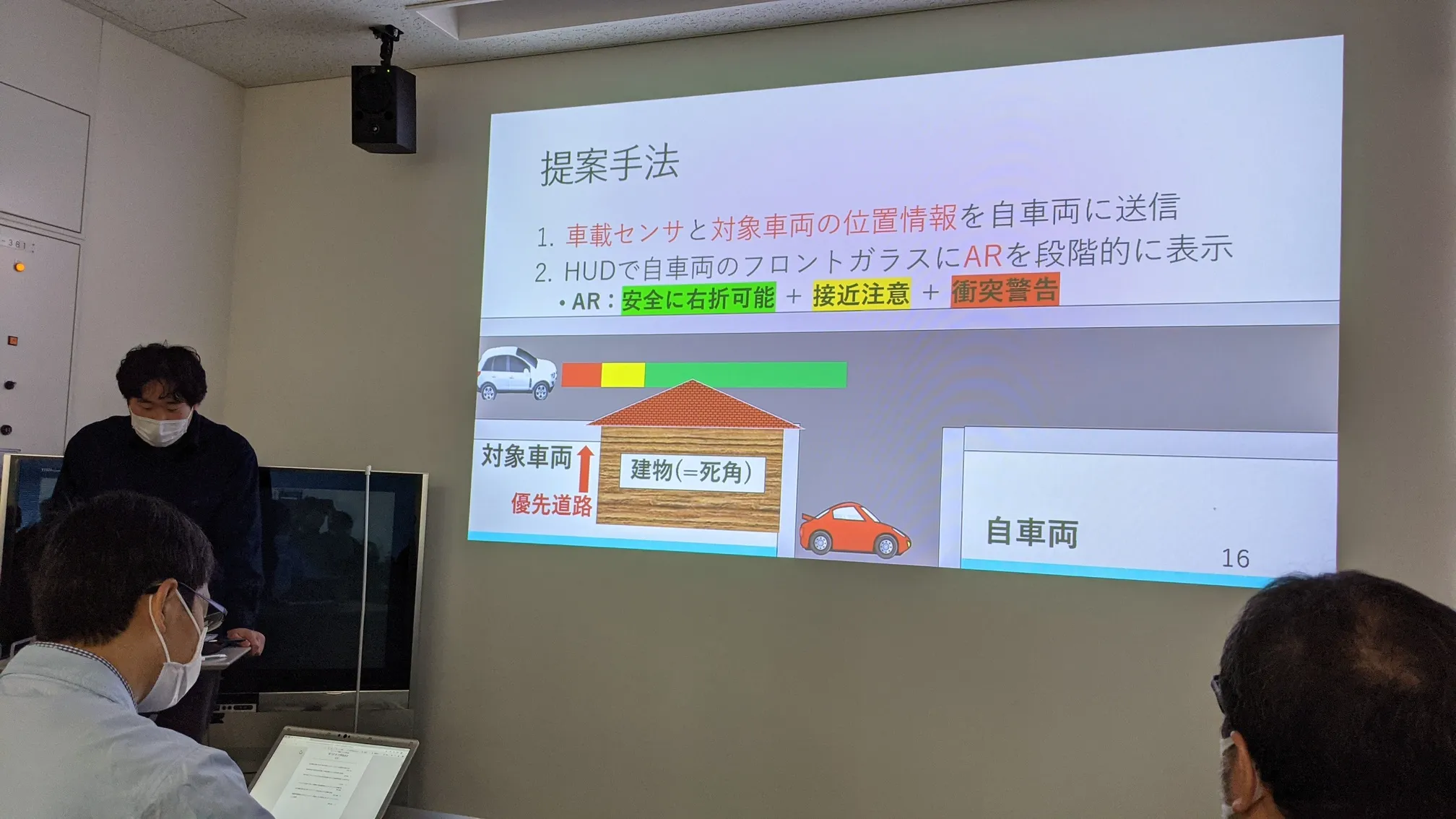
ダイナミックマップの時空間グリッド予約による自動バレー駐車制御方式(山本 浩太郎)
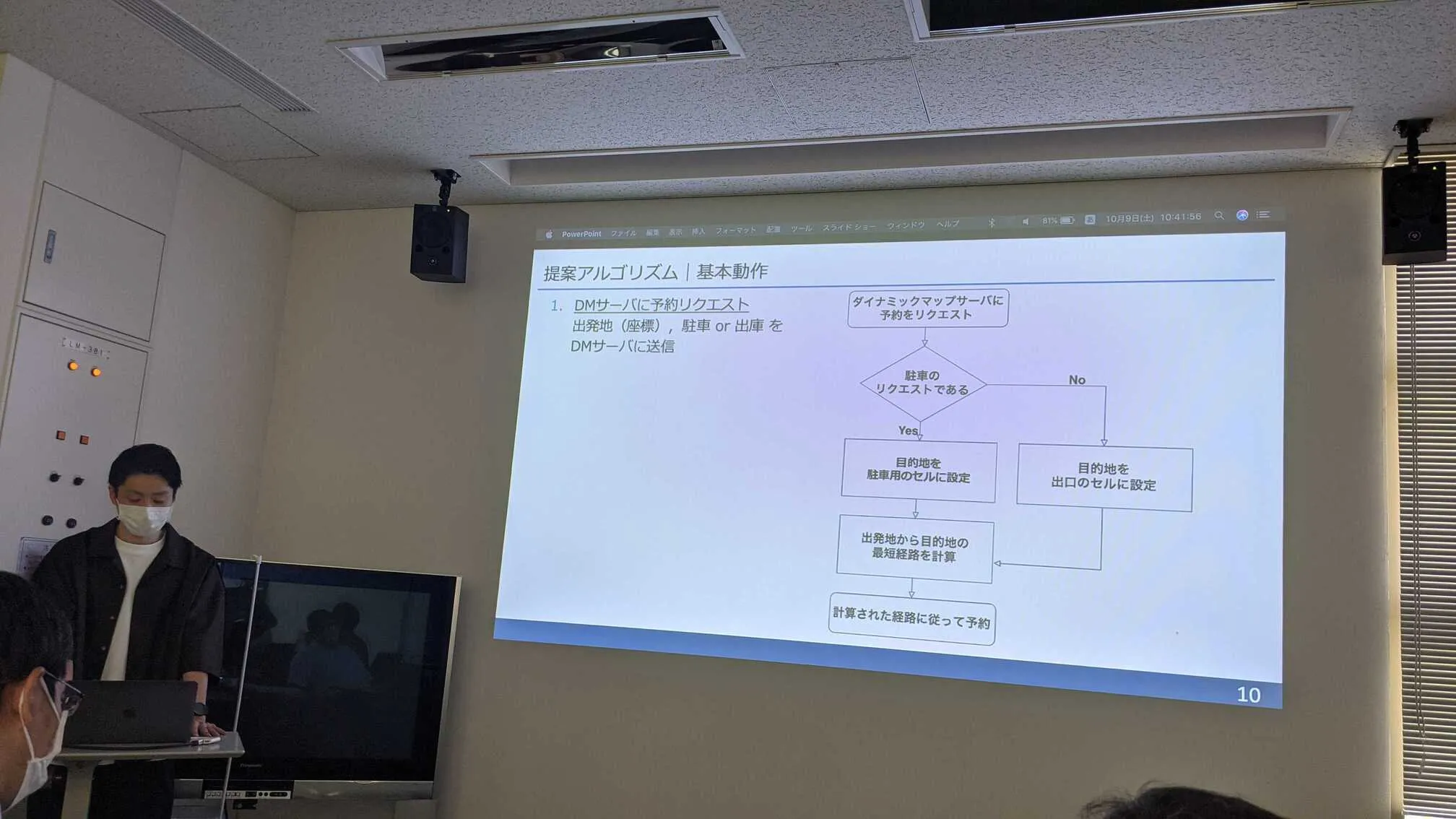
近年,自動バレー駐車(以下,AVPという)システムの研究・開発が行われている.AVPシステムとは,搭乗者の鍵を預かり駐車場側が人手を使って駐車や出庫を行うサービスを,自動運転の技術を使って無人で実現するものである.AVPシステムでは,自動運転技術により搭乗者の乗降場所から駐車場内の駐車スペースに車両を自動で駐車し,また,必要なときに駐車スペースから乗降場所まで自動で車両を呼び出すことができることが想定されている.複数の車両が駐車場内を効率よく移動する際には,各車両間で走行を調停する必要がある.車両の走行調停については,車両側のセンシングや制御機能に依存する方式,車両のセンシング機能に頼らず駐車場に備えるカメラなどを使って車両を遠隔操作するようなインフラに依存する方式,両者の中間をとって機能分担する方式が考えられている.また,車両の走行調停手法としてダイナミックマップ(DM)による時空間グリッド予約の利用が検討されている.DMとは静的な道路情報から動的な車両情報までを階層化して一元的に管理するプラットフォームである.DM上の道路空間が予め定められた大きさのセルに区切られており,時刻と各セルの集合体を時空間グリッドと定義し,DMのデータベース上で管理されている.図1に示すように,車両は走行したい区間について走行し始める予定時刻の数秒前に予約をDMにリクエストする.DMは他車両の予約と衝突が生じないように処理を行い,取得できた予約に基づきパスプラン(走行計画)が立てられる.車両は,得られたパスプランに従って走行する.先行研究ではこの基礎となる仕組みを単一交差点を想定して構築し,通信における計算量や旅行時間において考察が行われ,他の通信を用いる走行調停手法に比べて有用である可能性を示した.しかし,駐車場を想定した場合,その規模や形状は様々であり,先行研究のアルゴリズムを用いると予約の競合が生じる場合がある.本研究では,アルゴリズムを改良し,AVPの制御について検討する.