2024年5月18日の第157回月例発表会において,徳重 柊人(B4),野田 虎之介(B4),松浦 薫(B4),井若 勇志(B4),森 梓恩(B4),藤原 直己(B4),富成 泰生(B4)の7名が以下のタイトルで発表を行いました.
AR環境におけるタッチタイピング可能な仮想入力インタフェースの提案(徳重 柊人)

近年,拡張現実(AR)の技術は急速に普及しつつあります.特に,ヘッドマウントディスプレイ(HMD)を用いたARは,日常生活から医療や教育に至るまで,様々な場面での活用が検討されています.しかしながら,現時点ではハードウェアとソフトウェアの両方に未解決の問題が存在しています.まず,ハードウェアの問題点としては,以下の点が挙げられます:1. 別途物理キーボードが必要であること.2. デバイスの重さによって長時間装着が難しいこと.次に,ソフトウェアにおける主な問題点として文字入力インターフェースの課題が挙げられます.現在の文字入力インターフェースでは,以下の点が問題となっています:1. 1本の指のみの操作に限定されていること.2. 特定の姿勢を強いられること.特に,仮想キーボードでの入力に関しては,HMDに対して正面のハンドトラッキングしか行われていないため,キー入力を視界内で行わなければならないという問題があります.この方法では,入力画面とキーボードを確認するために視線や頭部を動かす必要があり,その結果,タッチタイピングに比べて入力速度が低下してしまいます.さらに,視線や頭部の動きに加えて,入力時に腕を上げた状態を維持しなければならないため,ユーザーの不快感や疲労の原因となります.一方で,タッチタイピングの有効性としては,以下の点が挙げられます:1. 入力速度の向上:キーを確認するための視線移動が不要であるため,直接的に速度の向上が期待できます.2. 入力精度の向上:入力結果を見ながら入力できるため,誤字や変換ミスに気付きやすく,結果として入力精度が向上します.以上の背景を踏まえ,本研究ではAR環境におけるタッチタイピングの問題点を解決することを目指します.具体的には,入力速度の向上とより自然な姿勢での入力を実現するためのインターフェースを提案します.
LIDの動的割り当てを利用したダイナミックマップシステムにおけるエッジサーバの負荷分散手法の提案(野田 虎之介)

ダイナミックマップは,高精度道路地図にセンサなどから得られる動的な情報を重畳することで,自動運転や高度な交通サービスを支えるための情報基盤です.従来のクラウドコンピューティングを用いた一極集中型のシステムでは,大量のアクセスに伴う処理負荷や通信遅延が問題となっていました.これに対し,現在ではエッジサーバを地理的に分散配置し,各エッジサーバが車両や路側センサからのデータを管理する分散型システムが研究開発されています.このアプローチにより,処理負荷の分散と通信遅延の低減が期待されています.しかし,従来のエッジサーバを使用したダイナミックマップシステムには,エッジサーバの計算資源の制限や負荷分散の難しさといった課題があります.そのため,一台のエッジサーバにアクセスが集中した場合,計算資源が不足し,交通安全に関わるサービスの提供に支障をきたす恐れがあります.本研究では,特定のエッジサーバに対してアクセスが増加した際に,そのエッジサーバが性能を維持できなくなる問題を解決するため,車両が集中し計算資源が逼迫しているエッジサーバの管轄の一部を隣接するエッジサーバに移譲する負荷分散手法を提案します.
T2I生成モデルへのプロンプト特効性毒攻撃における画像特性に基づいた部分的摂動予算割り当て設計(松浦 薫)
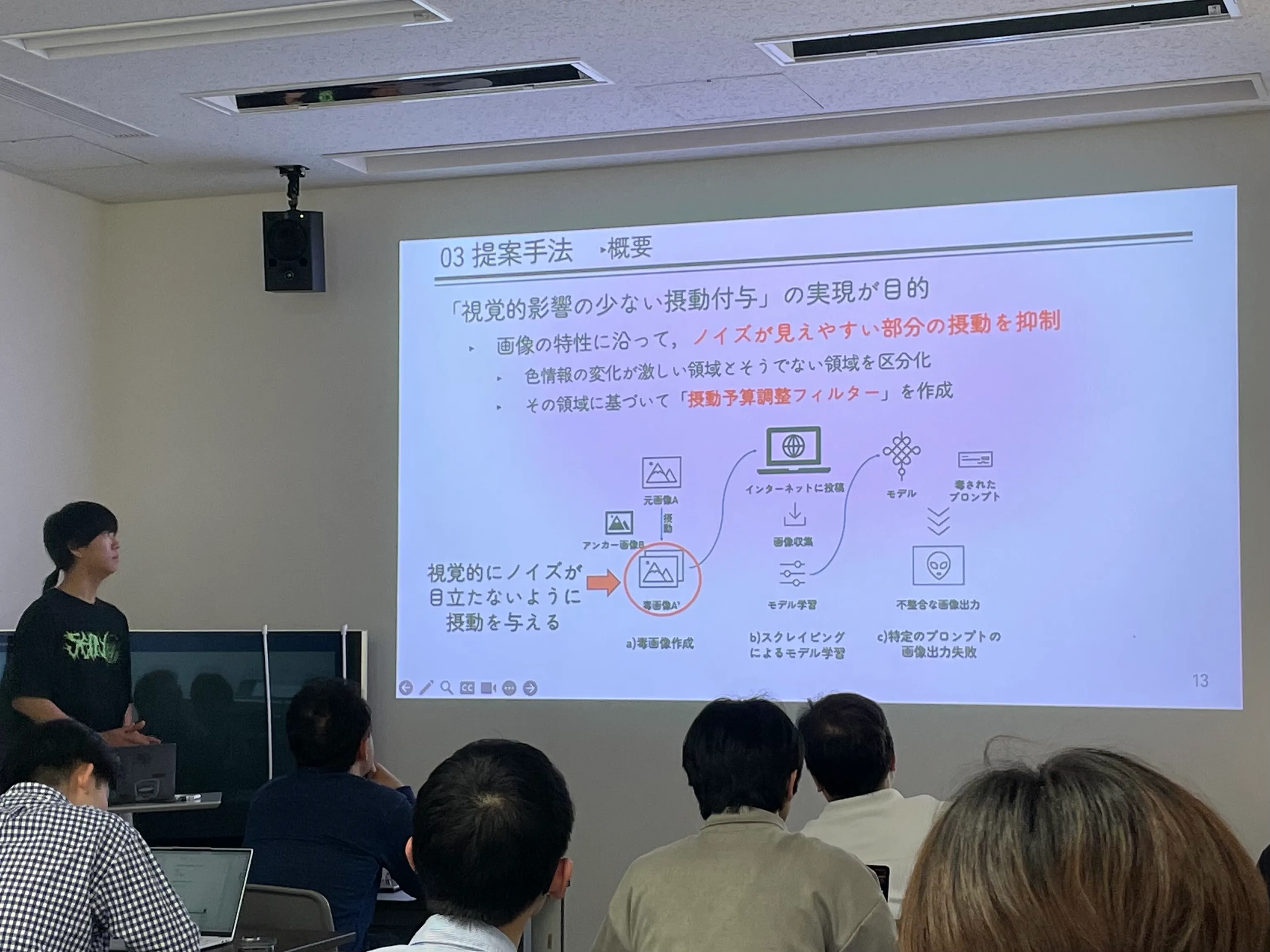
近年, テキストプロンプトを入力すると自動的に画像を生成するAIモデル(以下, T2I生成モデルという)が開発され, Webデザインや芸術作品など幅広い分野で応用されています.しかしながら, そのモデルの学習において知的財産権を無視したWebスクレイピングによるデータセットの作成が行われていることが問題となっています.これまで, インターネットへイラストを投稿するユーザは法的強制力や悪用検出性のないオプトアウトリストや無断使用禁止指示等の手段に頼らざるを得ませんでした.そこで, 投稿する画像に特殊な処理を施してT2I生成モデルの学習に利用されても正常にその画像を学習されないようにするモデルへの毒攻撃に関する研究が行われています.その中でもNightshadeというツールはインターネット上で大きな話題となりました.これは画像を視覚的にほとんど変化させることなくT2I生成モデルの学習を阻害することができるものです.しかしながら, このツールは画像の特性に基づいた画像加工がされておらず, 部分的に不自然な模様が浮き出てしまう場合があります.本研究では摂動(ピクセル値のわずかな変化)による視覚的な影響を考慮して画像の領域分割を行い, 各領域に適した摂動予算(摂動によるピクセル値の変化上限)を課すことで, より目立ちにくい変化を実現する手法を提案します.
時空間グリッド予約における空間効率を考慮した自動バレー駐車制御方式の提案(井若 勇志)

自動運転技術により搭乗者の乗降場所から駐車場内の駐車スペースに車両を自動で駐車し, 必要な時に駐車スペースから乗降場所まで自動で車両を呼び出すことができる自動バレー駐車に関する研究が行われています.ドイツのシュトゥットガルトでは, 無人かつ自動で駐車できる自動バレー駐車がドイツ連邦自動車局に承認され, 世界でも期待されています.複数の車両が自動バレー駐車を効率的に行うためには, 各車両で走行を調停する必要があります.そこで, ダイナミックマップにおける時空間グリッド予約を利用した自動バレー駐車が検討されています.この研究では道路上の空間と時間をグリッドに分割し, 各車両がどの時間にどのセルを走行するかをダイナミックマップ上で管理します.この手法を適用することで, 従来の手法と比較して待ち時間が削減され, 駐車場の回転効率が向上することを示しました.本研究では, 先行研究の課題である駐車スペースの有効活用に着目します.セルを細かく割り当て, 車両の大小を考慮し, 自動バレー駐車の利点であるドアの開閉スペースを設けないことで, ダイナミックマップを利用した時空間グリッド予約における複数の車両移動の駐車スペース効率化する方式を提案します.
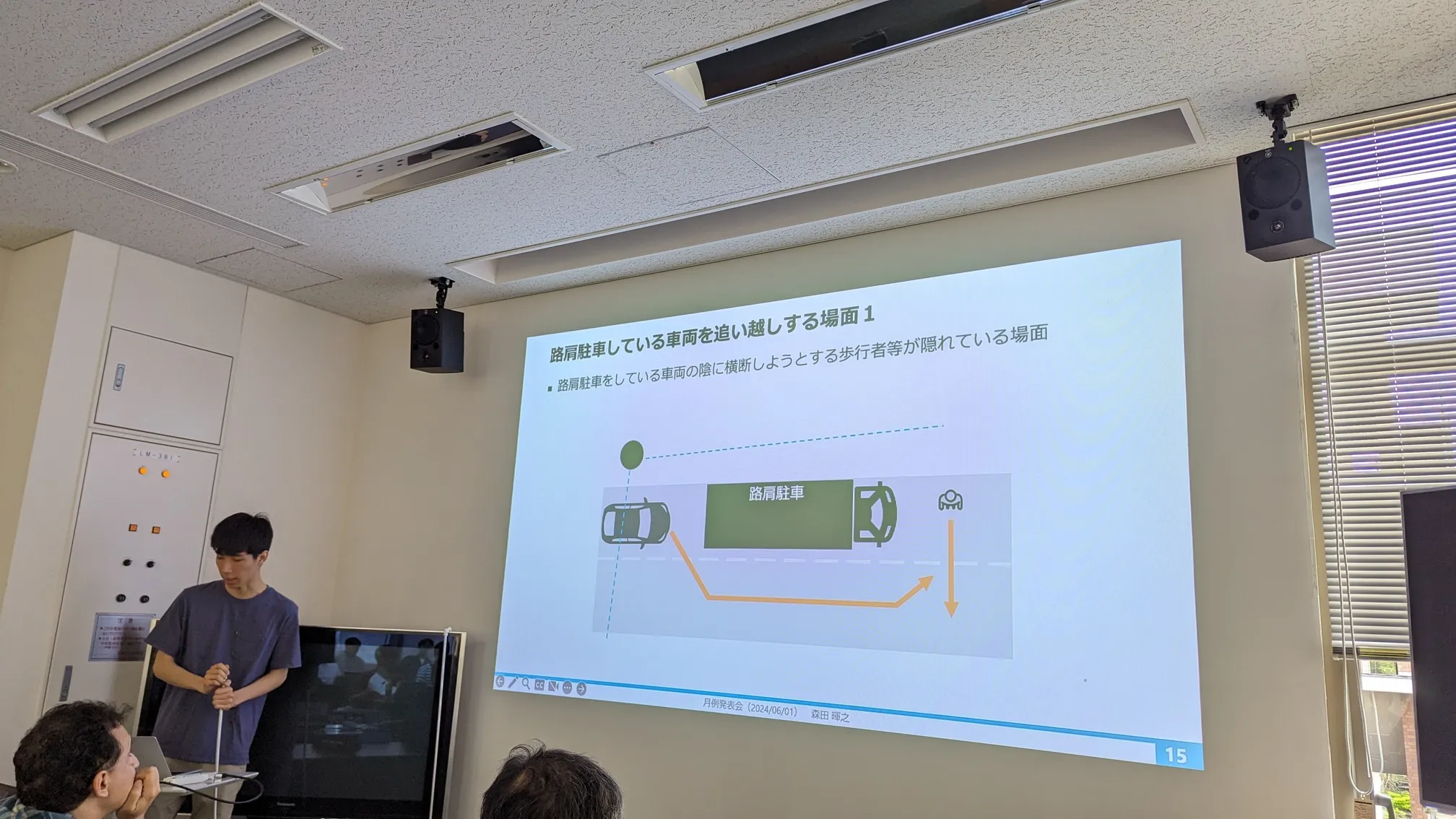
時空間グリッド予約における車線変更地点の広域化による道路合流調停手法の検討(森 梓恩)
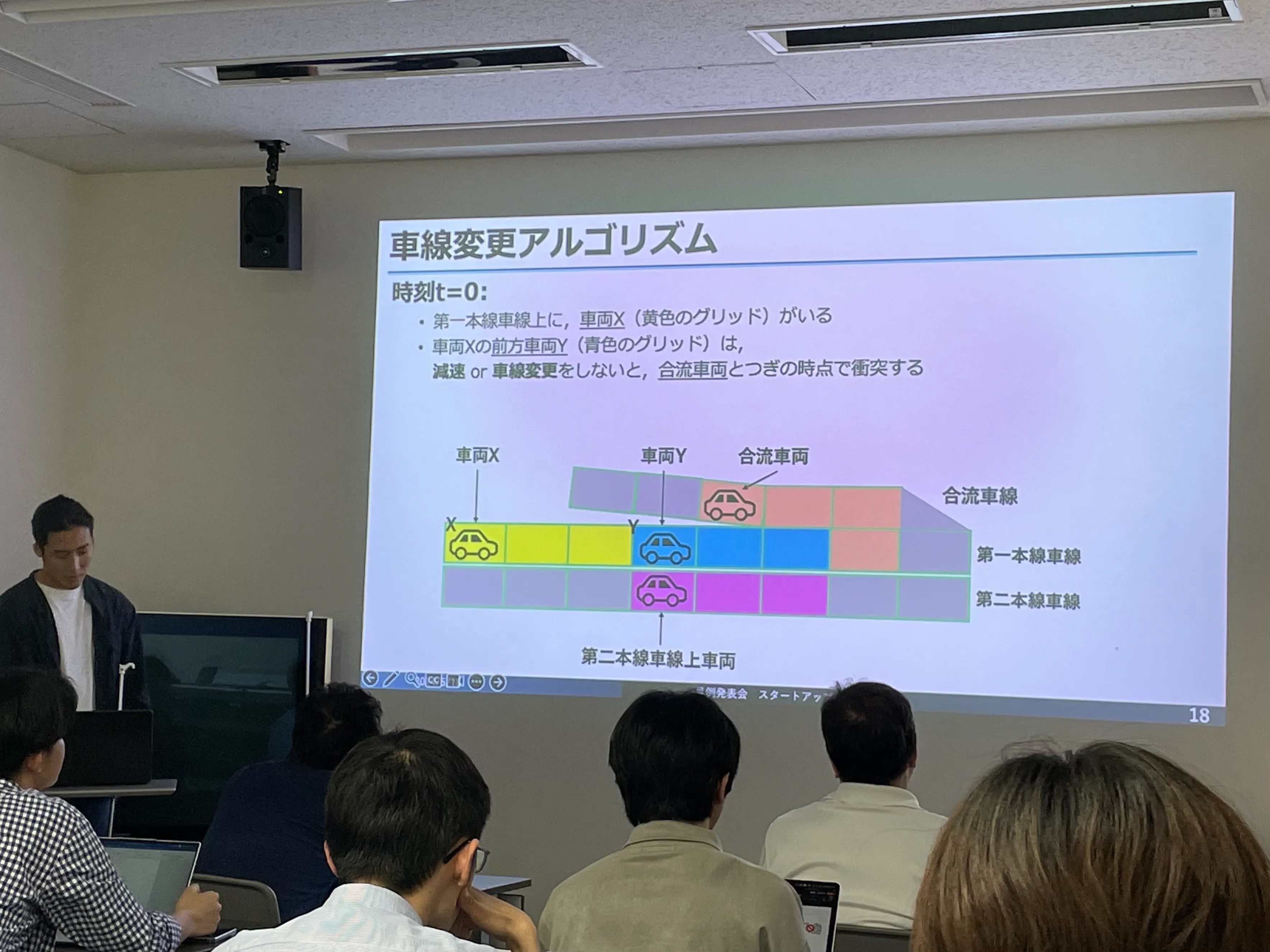
自動運転に関する研究では, 自車両の位置や速度などの車両情報や, 自車両に搭載されたセンサからのセンサ情報などを他車両と共有して, 協調的に走行する協調型自動運転に関する研究が行われています.また, これらの車両情報やセンサ情報などを地図上で管理する仕組みの一つとして, ダイナミックマップが検討されています.ダイナミックマップを利用した走行調停手法として, 時空間グリッド予約による手法が検討されています.道路空間をある大きさで分割し, 時間方向にも分割することで, 各時点の各空間についての単位が時空間グリッドとして定義されます.ダイナミックマップを利用した時空間グリッド予約による走行調停手法は, 計算量の観点から, 従来の車車間通信のような頻繁な通信が必要になる手法より優れた手法であることが示されています.時空間グリッド予約を高速道路の合流調停に用いた先行研究では, 車両の加減速を滑らかに行うことや, 合流地点付近での車線変更を考慮することで, 安全で効率的な合流調停が可能になることが示されています.しかし, これらの手法では, 車線変更地点が一つのみであるため, 車線変更地点に到達するまで減速する車両が連鎖的に発生し走行効率の低下に繋がることが懸念されます.本研究では, 時空間グリッド予約を用いた高速道路の合流調停において, 減速を減らし走行効率の向上と安全性の向上を目標に, 任意の地点で車線変更ができる合流調停手法を提案します.
時空間ボクセル予約による飛行領域を制限したドローンの調停制御(藤原 直己)
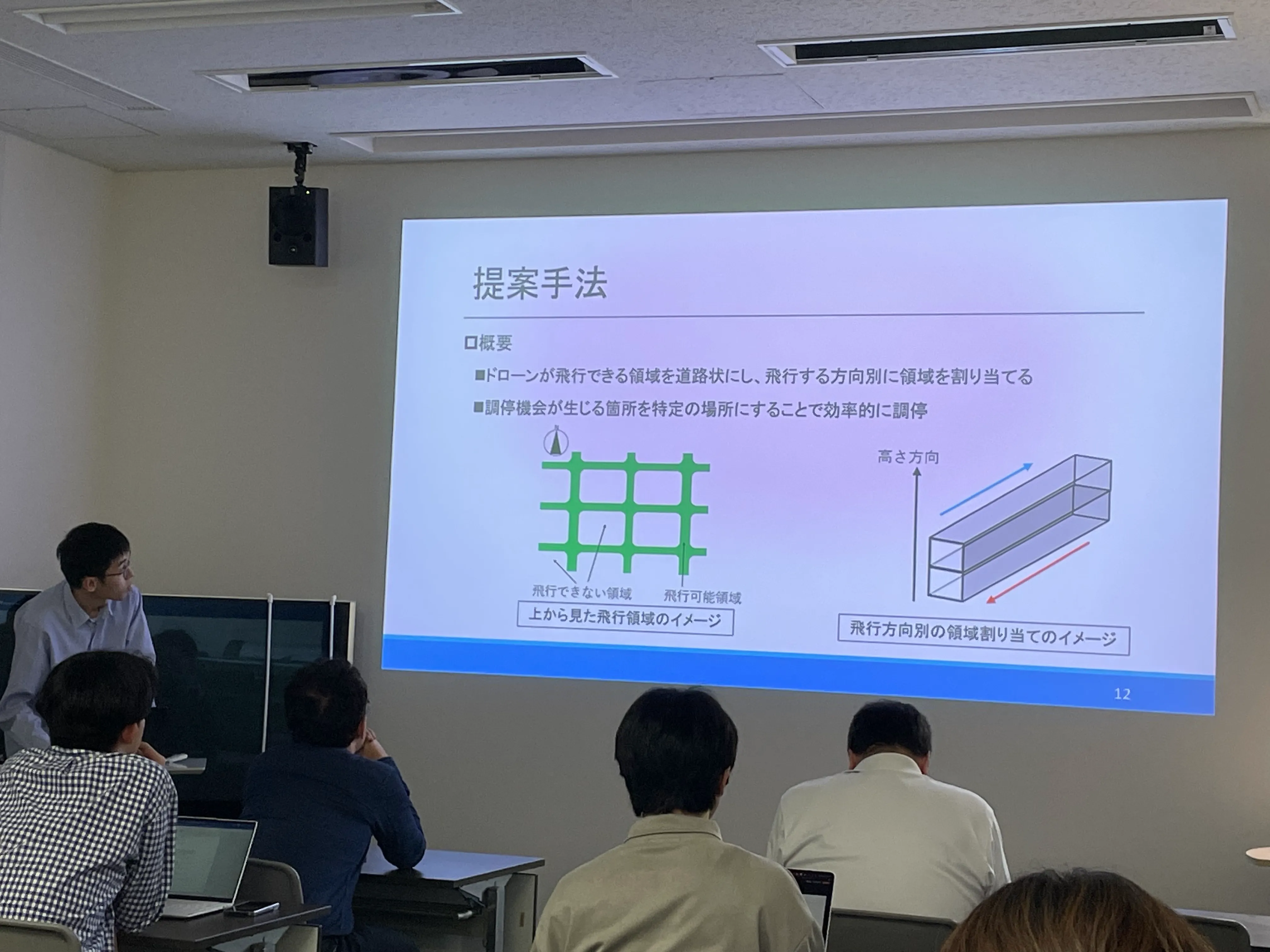
近年,物流業界では人手不足が深刻化しており,この問題を解決するために様々な新しい仕組みが検討されています.国土交通省の総合物流施策大綱では,「物流革命」としてドローンを物流における重要な新技術の一つとして位置付けているように,ドローンは物流業界で注目されつつあります.ドローンを実際に配送システムの一環として運用するなどドローンを多数飛行させるような場合,ドローン同士が衝突する可能性を低下させるために衝突回避が必要となります.ドローンの衝突回避方法には,自律的にドローン同士が位置情報などの情報を通信することで衝突回避する方法があります.しかし,ドローンの台数が増えると通信データ量が膨大になる問題があります.そこで,ドローンの台数が増加しても衝突回避性能が低下しない方法として,本研究では時空間ボクセル予約による飛行可能領域を制限した調停制御の手法を提案します.
スマートフォンを利用した個人認証のアルゴリズムの精度比較(富成 泰生)
近年,セキュリティの重要性が高まる中で,スマートフォンの多要素認証が注目されています.多要素認証は,単一の認証要素だけではなく,複数の要素を組み合わせることで,より高いセキュリティを提供します.また,多要素認証の一つとして生体認証があります.生体認証技術は利便性が高く,偽造が困難でありそれにより高水準のセキュリティを提供できるという利点があります.しかし,従来の認証方法にはいくつかの課題があり一部の状況下で精度が低下する可能性があります.例えば,マスクを着用している場合には顔認証が使用できない,指が濡れている場合では指紋認証が使用できないなどが挙げられます.このような課題に対して,スマートフォンのセンサデータから加速度と移動距離を取得し,歩数計を利用し歩幅を取得する歩行時の個人の識別を行う手法が提案されています.この手法は,センサデータを利用することで,ユーザがマスクを外す,指を拭くといった手間が省かれ不快感を感じにくい認証方法です.人数が増加した際に,似た特徴を持ったユーザの増加により精度が低下し,個人認証として機能しない可能性があります.また,ユーザの事前情報を歩行時しか測定していないため歩行者の速度が変化した場合正しく個人を認証できない可能性があります.本研究では,スマートフォンにより歩幅と加速度を取得して,多要素認証による個人認証を行う手法の精度向上と利便性改善を目的とします.歩幅と加速度を用いた個人認証手法の認識率を向上させるため,勾配ブースティング,k-最近傍法,SVMの3つのアルゴリズムを歩行時と走行時で比較し,精度向上と利便性の改善を目指します.