2024年6月1日の第158回月例発表会において,森田 暉之(M2),松下 翔太(M2),坂本 拓馬(M2),松村 学(M2),山崎 慎也(M2),東田 悠希(M2),コウ イチボン(M2)の7名が以下のタイトルで発表を行いました.
協調型自動運転におけるフリースペース情報共有の有効性(森田 暉之)
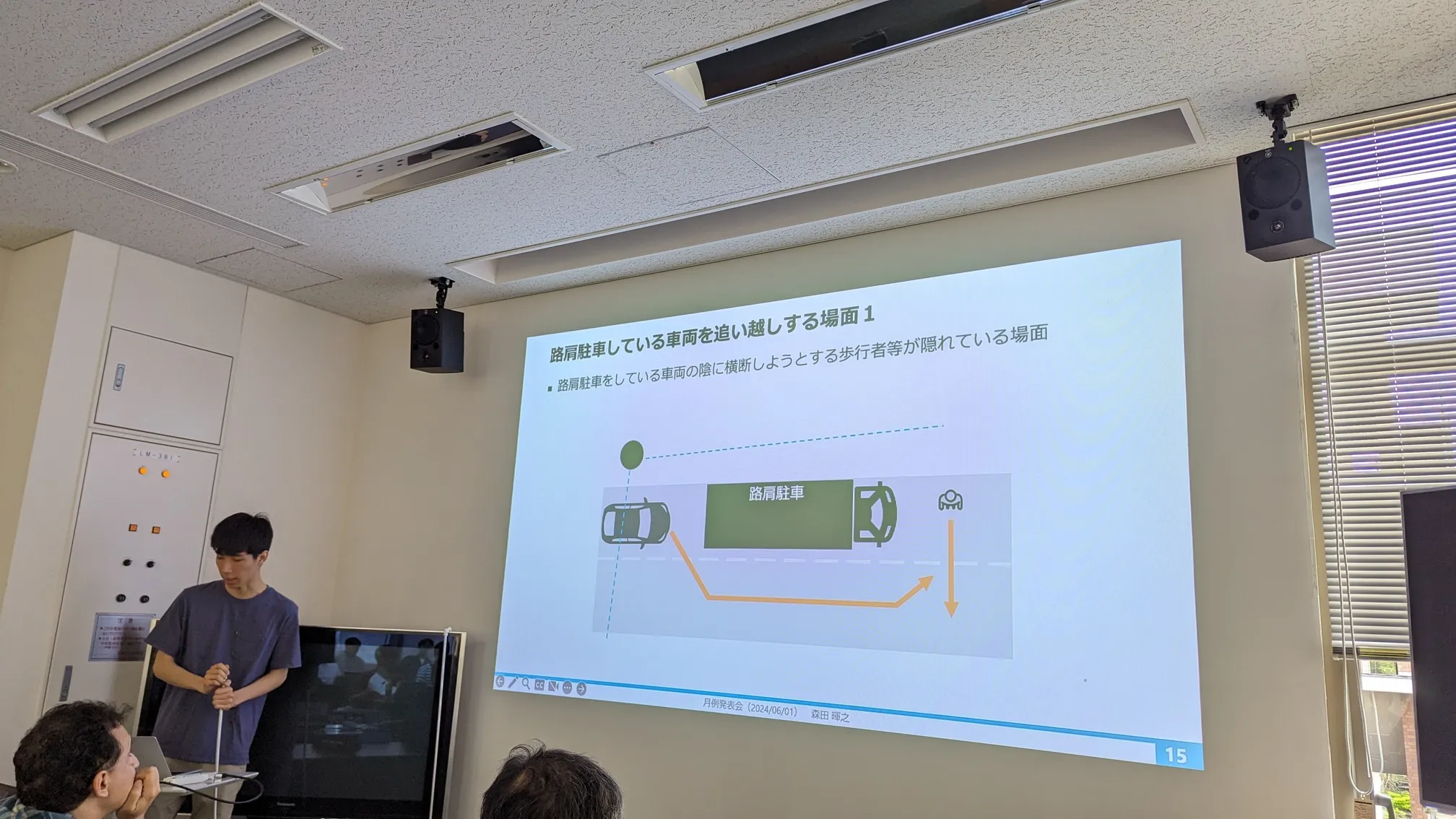
近年、通信を介して、路側センサを備えた路側機や周辺の他車両との間で情報共有を行う、協調型自動運転の研究が進められている。車載センサの検知範囲外の情報を自車両以外から取得することで、周辺環境に関連する豊富な情報を利用した走行を実現できる。協調型自動運転では、センサで検知した物標の種類や位置情報、速度情報などが物標情報として共有される。しかし、周辺環境におけるすべての物標情報を取得できる保証はなく、実際に物標が存在するにもかかわらず、物標情報が得られない可能性がある。また、変化の激しい複雑な道路環境において、物標情報のみでは回避できない、潜在的な危険性が存在する。本研究では、物標が存在しない領域をフリースペースと定義し、物標情報と併せて共有することを検討する。図1に示すように、フリースペースは、センサの検知できている領域と検知できていない領域とを判別できるという点で物標情報と異なる性質を持つ。この性質の違いが現れる場面において、車両の走行を含むシミュレーション実験を行い、協調型自動運転におけるフリースペース情報の有用性を示す。
協調型自動運転のためのオブジェクト移動を考慮した占有格子地図の検討(松下 翔太)
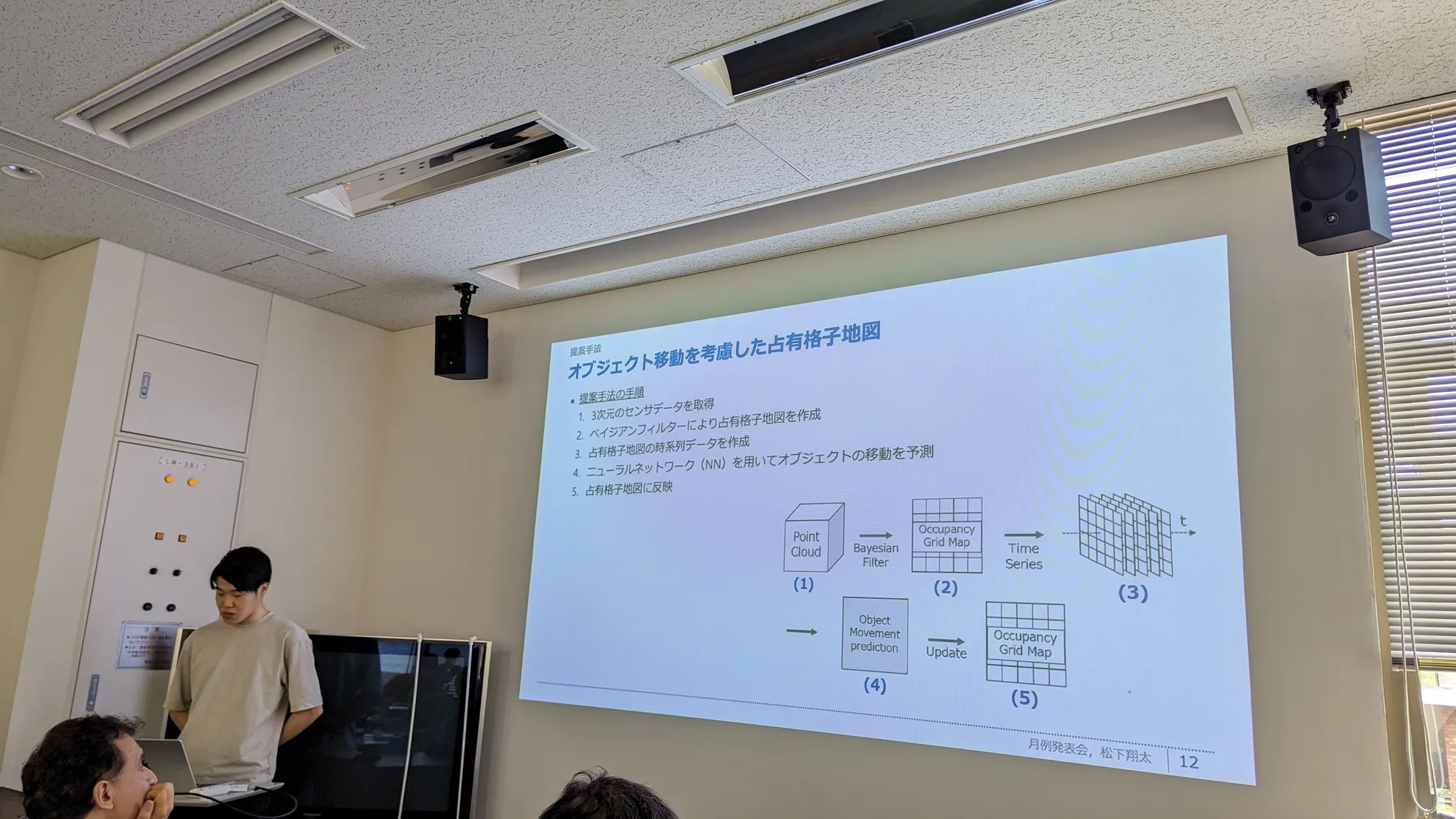
近年,車載センサや路側センサから得られたセンサ情報を通信技術を用いて共有することで,高度な自動運転を実現する協調型自動運転が注目されている.協調型自動運転では,得られたセンサ情報を統合することで,自車両からは死角となっている歩行者や車両などのオブジェクトを検知することができる.センサ情報を統合する手法として,センサ間で共通な格子状の地図を用いる手法である占有格子地図がある.しかし,占有格子地図は各セルが独立してオブジェクトの存在確率を計算するため,セル間でオブジェクトが移動することを考慮できない.そのため,車両の死角からオブジェクトが飛び出した場合,車両の急停止や急減速が発生し,走行の安全性が低下するという問題がある.そこで本研究では,占有格子地図の時系列データを用いて,オブジェクトの移動を予測する手法を提案し,安全性の向上を検討する.
MUD・SDN・IDS を用いたホームネットワークにおける IoT デバイスのセキュリティシステムの提案(坂本 拓馬)
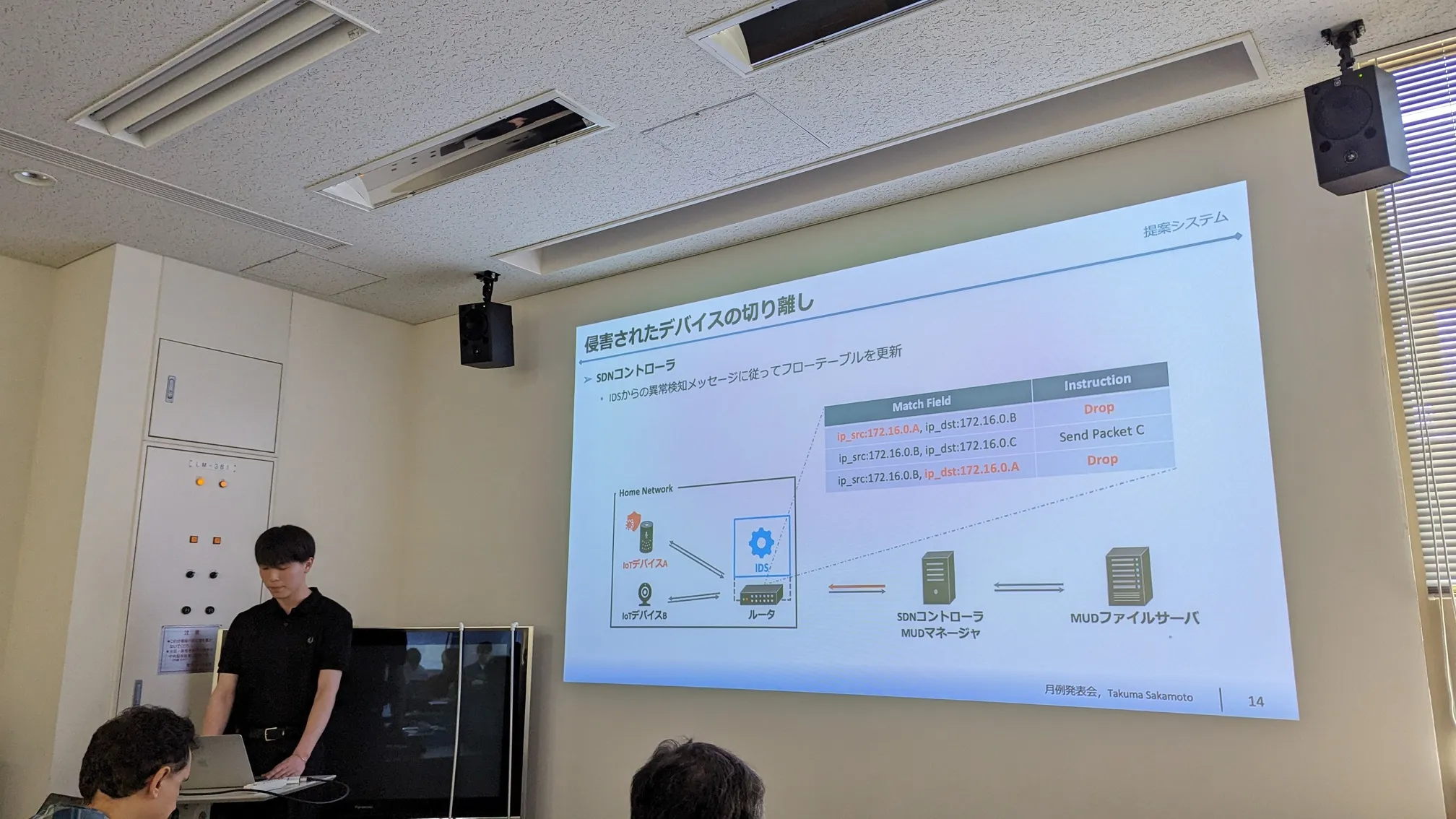
近年,IoT(Internet of Things)の発展により,多くのモノがインターネットに接続され,利便性が高まる一方で,セキュリティ上のリスクも高まっている.IoTデバイスは,最低限の性能を発揮するCPUやメモリしか保持していないことが多く,適用できる機能が限られているという問題がある.そのため,ログ出力や暗号化などのセキュリティ対策をIoTデバイスに直接適用することは困難となる.また,ホームネットワークのユーザは一般的にセキュリティに関しての知識を持っておらず,ユーザ自身でセキュリティの設定を行うことは困難である.そこで,ユーザの負担を減らしつつ,セキュリティ対策を施す手法の1つとして,MUD(Manufacturing Usage Description)という規格が提案されている.MUDではIoTデバイスの製造元が通信ポリシーを記述したMUDファイルを作成し,その通信ポリシーに従って通信制御を行う.実際に,SDN(Software Defined Networking)を用いて中小規模のネットワークにMUDを適用する方式が提案されている.しかし,製造元はすべての使用環境を想定することはできないため,適切な通信ポリシーが作成されないことでセキュリティの問題や,IoTデバイスの機能を最大限活用できないなどの問題が発生する.また,MUDによるセキュリティ対策は家庭内に構築したLAN環境などのローカル環境において,攻撃の侵入を許したIoTデバイスからの攻撃のようなローカル環境内部からの攻撃には弱いといった問題がある.そこで本研究では,SDNを用いてホームネットワークにMUDを適用する.また,IDS(Intrusion Detection System)を用いて侵害されたローカル環境内のIoTデバイスからの攻撃を検知し,侵害されたIoTデバイスをSDNを用いてネットワークから切り離すことで攻撃による被害を最小化するシステムを提案する.
自動運転と手動運転の混在環境における時空間グリッド予約による道路合流調停手法(松村 学)
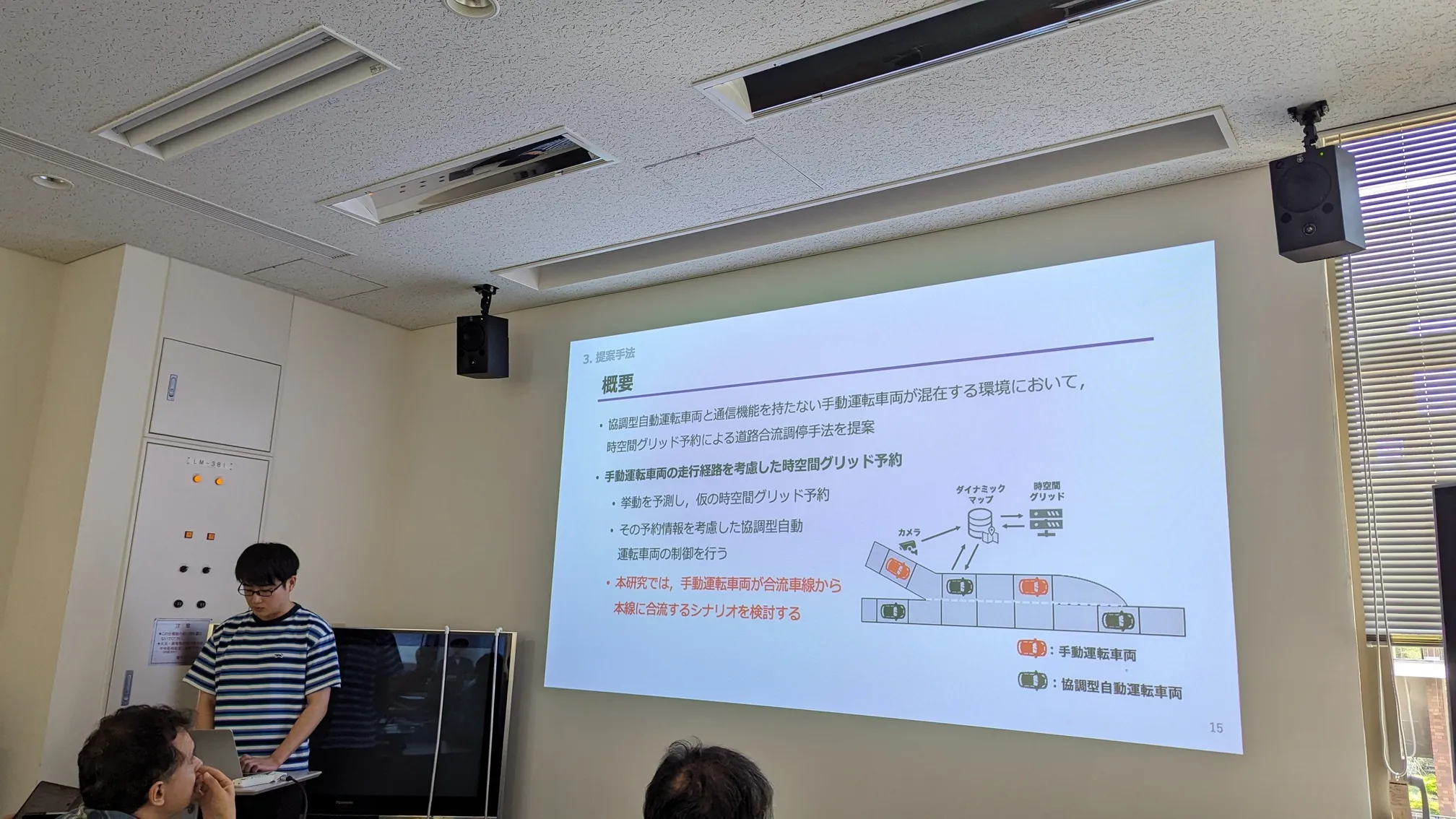
近年、協調型自動運転車両に関する研究が進められている.協調型自動運転では、V2V(Vehicle-to-Vehicle)通信やV2I(Vehicle-to-Infrastructure)通信を用いて,自車両の情報を基に事前に走行経路を決定することで自動運転車同士が協調的に走行することが可能となる.協調型自動運転の走行調停手法としてダイナミックマップによる時空間グリッド予約の利用が検討されている.時空間グリッド予約の概要を図1に示す.時間と道路空間を区切って作成したセルの集合体を時空間グリッドとして定義し,車両は走行したい時空間グリッドを事前に予約することで車両走行の調停をとる.しかし,時空間グリッド予約による走行調停手法は全ての車両が自動運転車両であることを前提としている.自動運転車両の完全な普及は長期にわたることが想定されているため,通信機能を持たない従来車両を考慮した自動運転車両の制御手法の提案が必須である.本研究では,協調型自動運転車両と通信機能を持たない従来車両が混在する状況において,時空間グリッド予約による道路合流調停手法を提案する.手動運転車両の走行経路を予測した時空間グリッド予約を行うことで,手動運転車両との混在状況を考慮した協調型自動運転車両の時空間グリッド予約を実現する.協調型自動運転車両を制御することで効率的かつ安全な合流調停を目指す.
車両の走行環境を考慮した協調認識メッセージにおける冗長性緩和手法の検討(山崎 慎也)
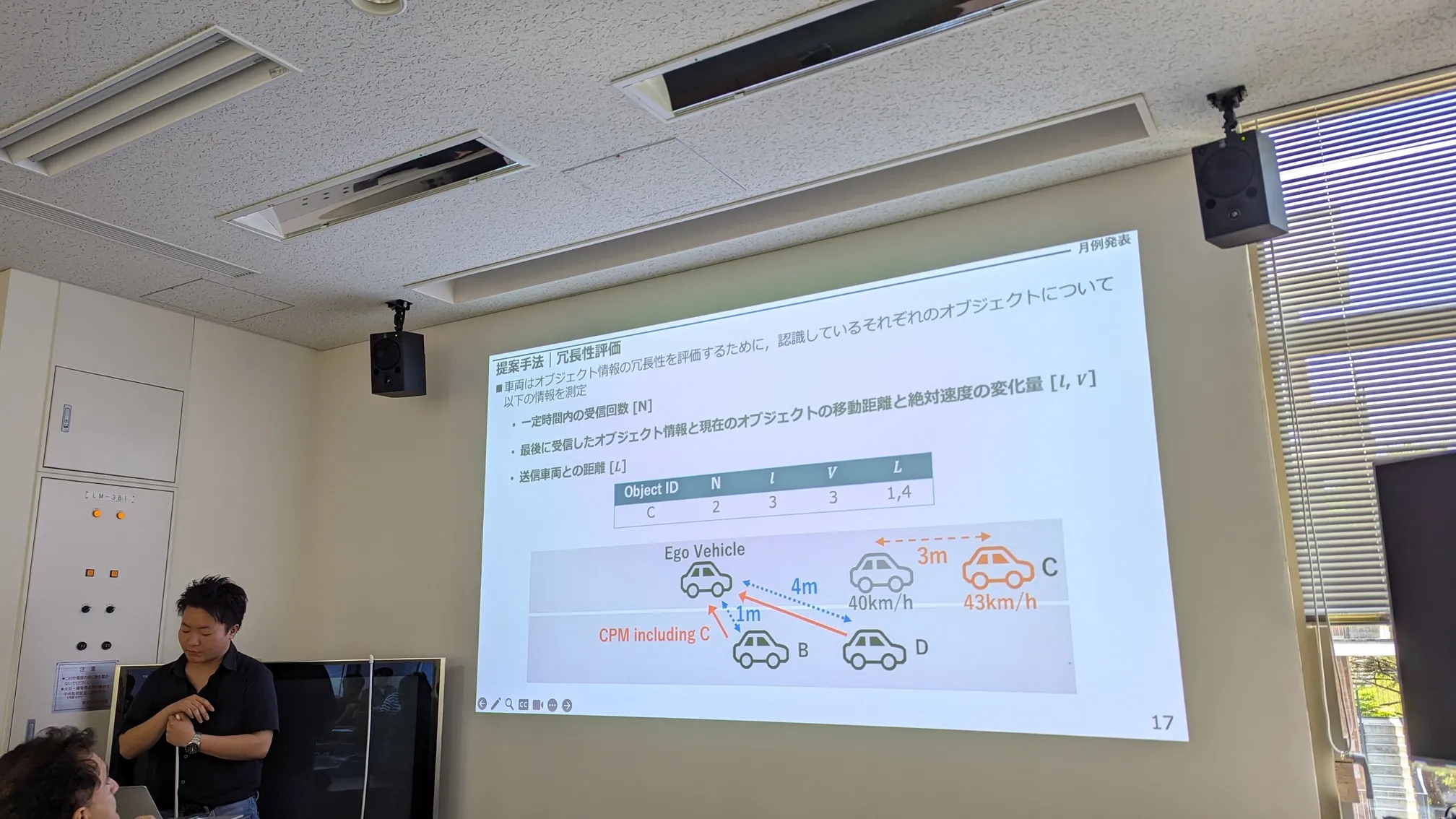
近年,車両の周辺環境の認識を向上させる技術としてCPS(Collective Perception Service)に関する研究が盛んに行われている.車両と路側機がセンサで検知したオブジェクトの座標,速度,加速度,方向などのオブジェクト情報をV2X(Vehicle-to-Everything)通信を用いて他の車両や路側機と共有することで,車両の周辺環境の認識が向上し,交通の安全性の向上が期待されている.現在,ETSI(European Telecommunications Standards Institute)はCPSの標準化に取り組んでおり,車両と路側機がセンサで検知したオブジェクト情報を送信するためのメッセージであるCPM(Collective Perception Message)の規格を定めている.車両がセンサで検知したオブジェクト情報と以前に受信したCPMに含まれるオブジェクト情報をCPMに含みブロードキャストすることでオブジェクト情報を共有する.しかし,複数の車両がCPMを定期的にブロードキャストすることにより,冗長なオブジェクト情報を複数回共有してしまうため,通信帯域が逼迫する恐れがある.通信帯域が逼迫すると車両が必要とするCPMを受信することができなくなる可能性があり,車両の周辺環境の認識の低下に繋がる.この問題に対して,ETSIは冗長なオブジェクト情報を削除することでCPMのメッセージサイズを縮小する手法であるRMR(Redundancy Mitigation Rule)を複数提案している.しかし,それぞれのRMRによってオブジェクト情報の冗長性の判断基準が異なるため,車両台数や車両の速度,加速度などによってCPSの性能が低下する恐れがある.本研究では,提案されている3つのRMRを組み合わせて冗長性が大きいオブジェクト情報を抽出し削除することで,メッセージサイズを削減し通信帯域の逼迫を低減し周辺車両の認識を向上させる手法を提案する.
LSHに基づいた類似車両抽出によるV2X通信の仮名変更方式の検討(東田 悠希)

近年,車両とあらゆるものが通信を行うV2X(Vehicle-to-Everything)通信に関する研究が盛んに行われている.V2X通信では,自車両の速度や位置情報等を含んだメッセージを周囲の車両等に送信することで車両情報を共有する.共有された情報は,交通の安全や効率化のアプリケーションに利用することで,車両同士や歩行者との事故防止,渋滞の緩和などに繋がることが期待されている.しかし,メッセージは利用の際に復号化に時間を要すると遅延が増えて安全性に影響を与えるため,暗号化は推奨されておらず,メッセージの中には平文で送信される情報が含まれている.そのため,悪意のある攻撃者がメッセージを盗聴すると,攻撃者は車両の位置情報を追跡することができ,ドライバの行動や自宅等の位置プライバシを侵害する恐れがある.位置プライバシを保護するために,仮名を用いた方式が検討されている.この方式では,車両ごとに割り当てられる一意な識別子の代わりに,仮名と呼ばれる仮の識別子を割り当て,仮名を距離や時間等の様々な条件で繰り返し変更することで攻撃者を混乱させることが出来る.しかし,仮名を用いる方式にもリンク攻撃と呼ばれる攻撃が存在し,仮名変更後でも仮名変更前の車両とリンクして,攻撃者が追跡を継続出来る問題がある.そこで本研究では,車両の速度や位置情報等の車両情報で,より類似する車両情報を持つ車両群をLSH(Locality Sensitive Hashing)により抽出する.抽出した車両群で更に協調して仮名を変更することで,攻撃者による車両の特定を困難にし,高い位置プライバシの保護を可能にする方式を提案する.
Graph Neural Networks for Dynamic Resource Allocation in V2X Communications(Huang Yifan)
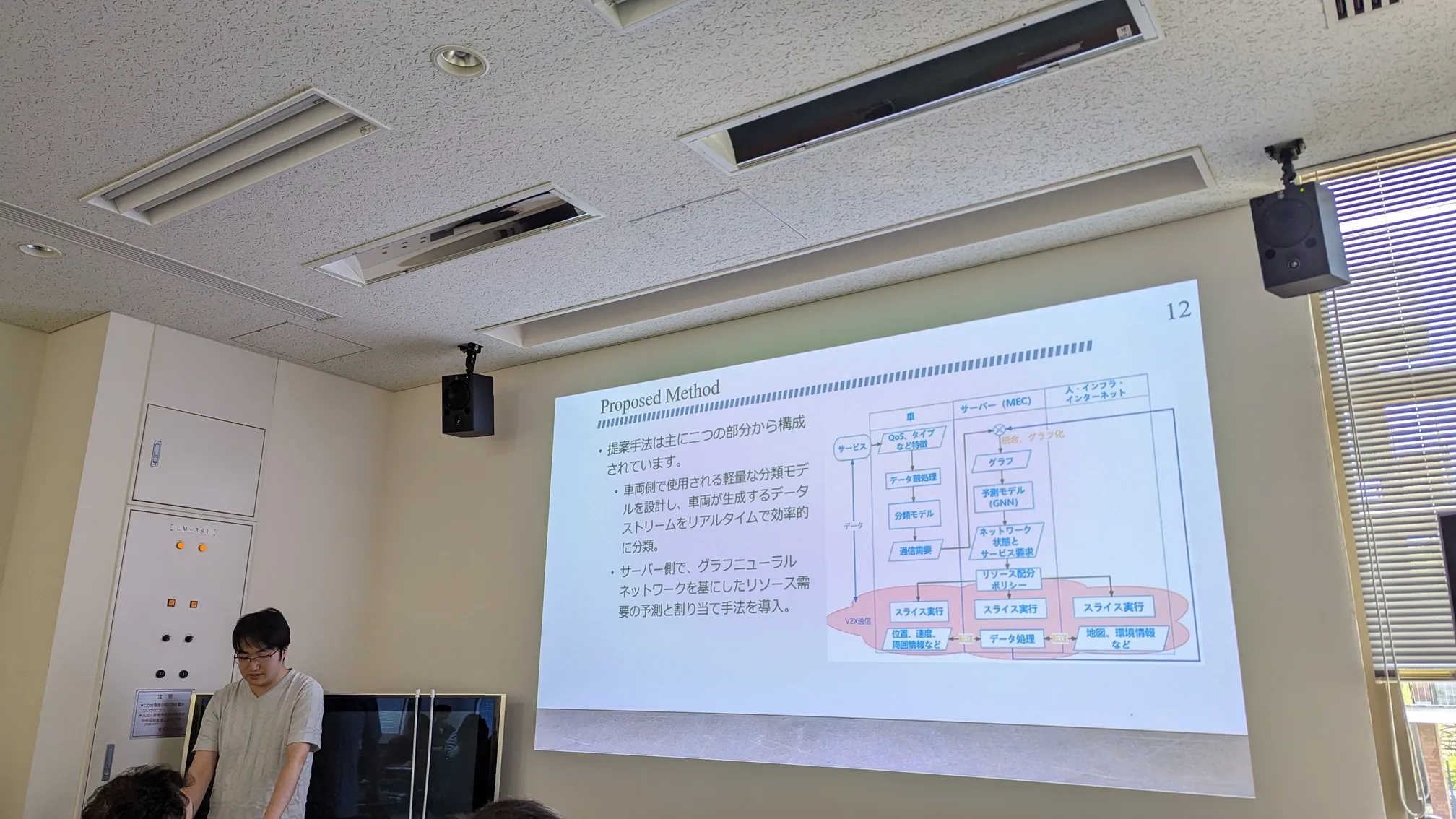
The term V2X refers to "vehicle to everything," which denotes the exchange of information between a vehicle and the external environment, including V2N (Vehicle-to-Network), V2V (Vehicle-to-Vehicle), V2I (Vehicle-to-Infrastructure), and V2P (Vehicle-to-Pedestrian) in intelligent connected communications. However, V2X also poses new challenges for wireless network resource management. Therefore, a method needs to be designed to maximize the communication quality during information exchanges. Traditional communication resource allocation methods struggle to rapidly meet the dynamic and diverse demands of V2X communication. To address the quality issues in V2X communication, I have proposed a new network slicing framework for dynamic resource management in V2X communications. By utilizing graph neural networks (GNN), the proposed method can not only adapt more effectively to changing conditions but also ensures timely and reliable satisfaction of diverse service demands.