2024年7月13日の第159回月例発表会において,髙田 陽輝(M1),田牧 浩月(M1),梅田 寛斗(M1),松本 翔汰(M1),岩井 駿人(M1)の5名が以下のタイトルで発表を行いました.
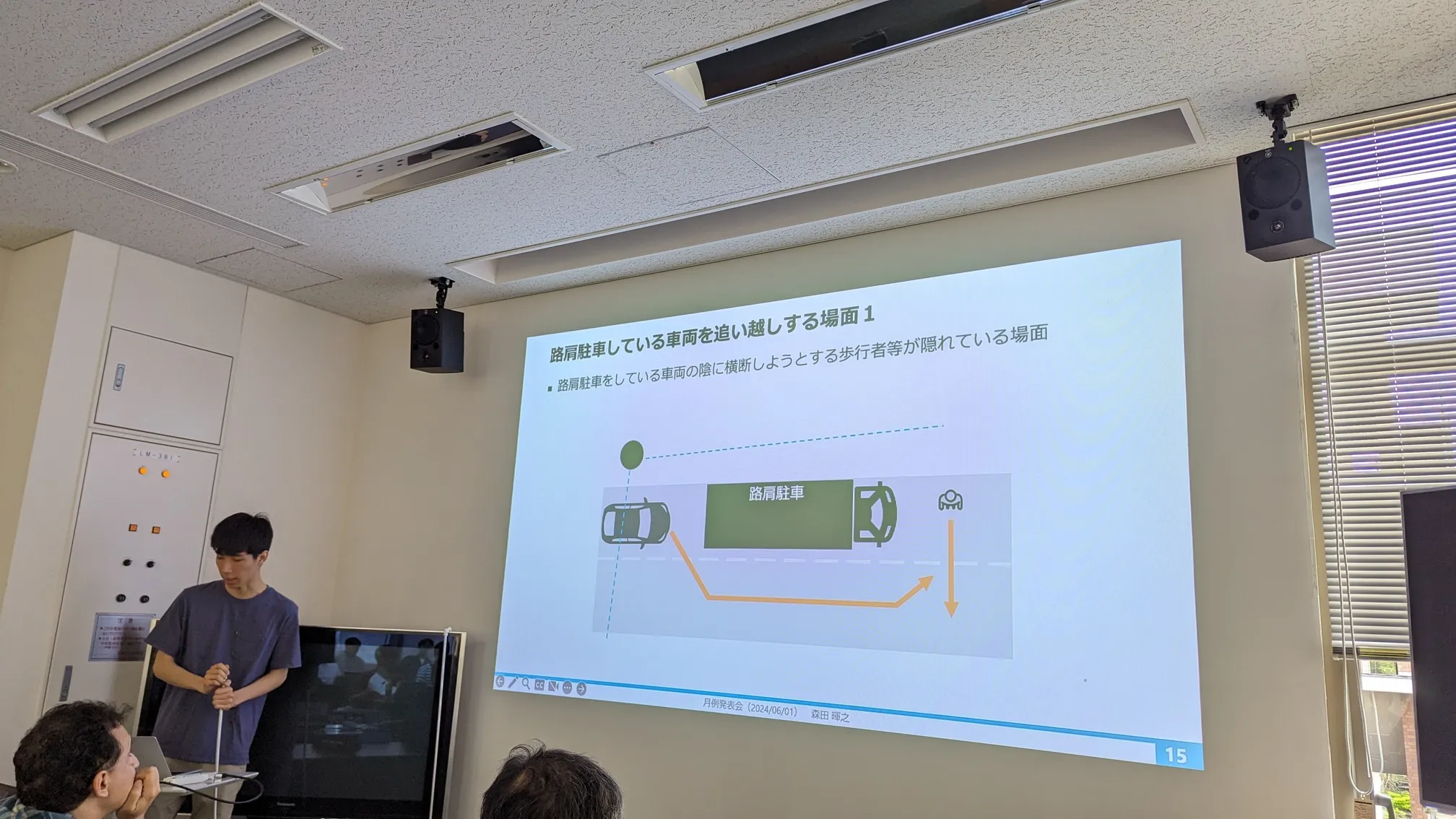
ドライバの視線情報に基づくAR視線誘導を利用した運転支援システムの検討(髙田 陽輝)
平成30年から令和4年において,交通事故発生件数と死亡事故件数は減少傾向にある一方,発生件数に対する死亡事故件数が占める割合は僅かに増加傾向にある.また,平成24年から令和4年における致死率及び死者数の推移を見ると,死者数は減少傾向にある一方で,致死率は増加傾向にある.この原因として,他の年齢層に比べて致死率が高い高齢者の人口が増加していることが考えられ,致死率の増加を防ぐためには更なる交通事故発生件数の減少が必要不可欠である.交通死亡事故発生件数を法令違反別に見ると,安全運転義務違反が約半数を占めており,安全運転義務違反の中でも,運転操作不適,漫然運転,安全不確認,脇見運転が多くの割合を占めている.しかし,漫然運転や安全不確認,脇見運転による事故は,ドライバが十分な注意を払って運転することにより防止できるものである.そこで,本研究では視線誘導によってドライバの意識を危険な箇所へ向けることで,ドライバに対して十分な注意を払った運転を促すシステムを提案する.ドライバが装着するARグラスを通じて,ドライバの視線情報の取得や,ドライバに対する視線誘導を行う.取得した視線情報からドライバの意識が危険な箇所に向いているのかを判定し,意識が向いていないならば,AR表示を利用して該当箇所へ意識を向けさせるシステムを提案する.
複数の自動運転車両と複数歩行者とのコミュニケーションが可能なeHMIの検討(田牧 浩月)

近年,自動運転車両の普及が進んでいるが,自動運転車両と歩行者間の相互作用は,人間が運転する手動運転車両と歩行者間の相互作用とは大きく異なる.手動運転車両の場合,横断歩道や無信号交差点などの道路空間では,歩行者は車速情報や運転者とのジェスチャーやアイコンタクトなどのコミュニケーションをとることで,スムーズな意思決定することができる.しかし,自動運転車両の場合は,運転者がいない場合や運転者が前を向いていない場合を考えなければならず,歩行者は横断して良いかどうかを判断するための情報が少ないため,スムーズな意思決定をすることができない.そこで,自動運転車両と歩行者間とのコミュニケーションに有効な様々な外部ヒューマンマシンインターフェース(eHMI)が提案されている.しかし,現状では主に車両にeHMIを表示する手法が提案されており,複数歩行者に対応できない問題が挙げられる.例えば,2人の歩行者が横断したい状況を想定すると,車両に表示されている「通行可能」の意味を含んだシンボルを見ただけではどちらの歩行者を想定しているのか,あるいは両者に向けて表示しているかが分からない.また,複数の車両が存在した場合は,歩行者はすべての車両を確認しなければならないため,より複雑性が増して判断が難しくなる問題が挙げられる.そこで本研究では,歩行者のそれぞれの位置に最も近い車道にeHMIを表示することで,複数の自動運転車両と複数の歩行者がいる状況での安全性向上と安心感向上を検討する.
時空間ボクセル予約の階層管理による複数ドローンの効率的経路計画手法の検証(梅田 寛斗)
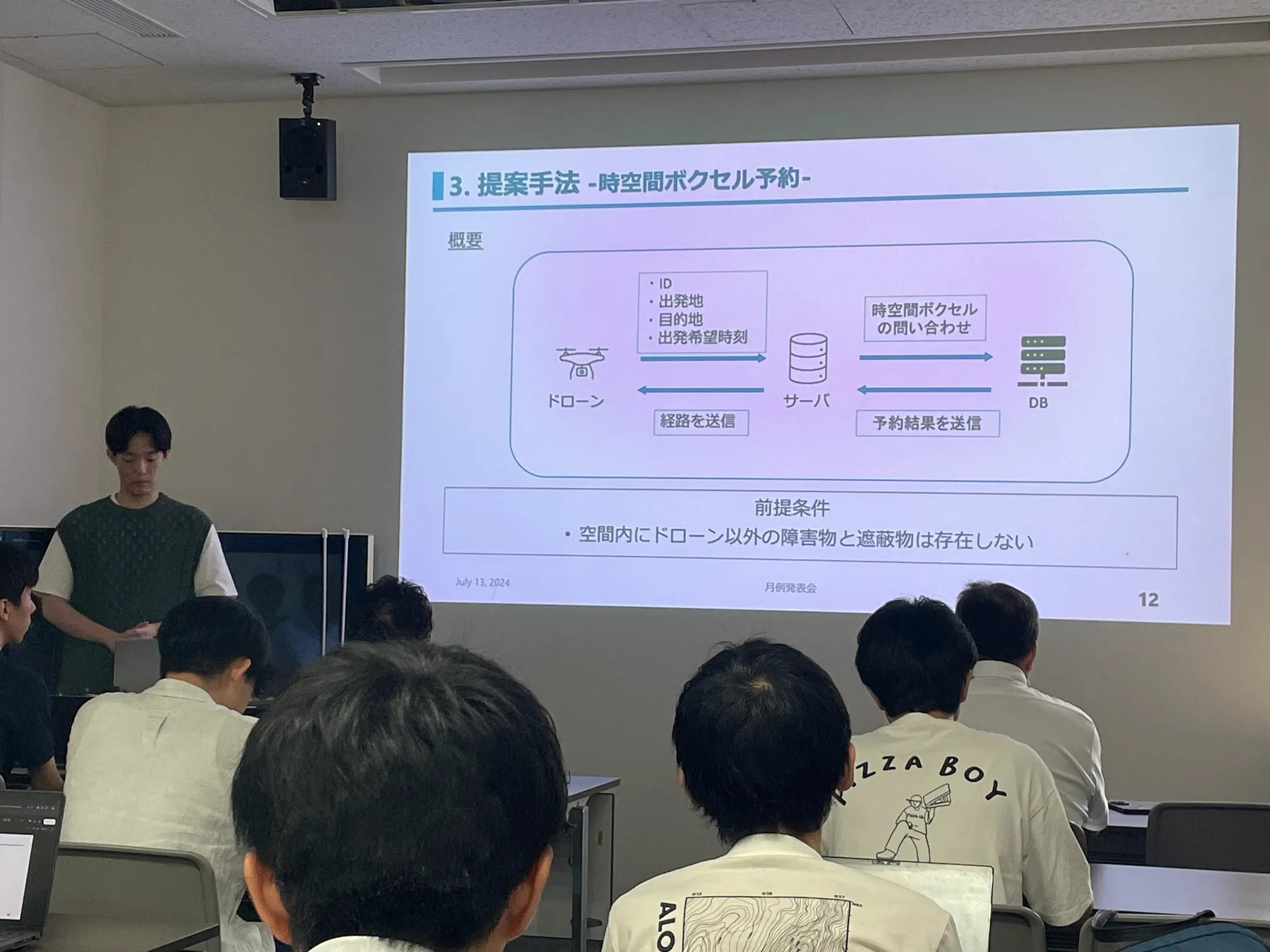
近年,ドローンはホビー用から産業分野まで多岐にわたる領域で活用されている.特に,宅配ドローンや3次元測量,インフラ点検などの分野でドローンを活用した取り組みが活発になっている.しかし,ドローンはバッテリー容量が少ないため,飛行時間や飛行距離が制約されている.そのため,バッテリーの消耗を最小限に抑えながら目的地に到達するために,効率的な経路を計画する必要がある.さらに,ドローンが複数飛行する環境では飛行経路の交差による衝突の問題が発生する.全てのドローンの経路を計算して衝突を回避しようとする場合,ドローンの台数が増加するにつれ計算量が膨大になるという問題点がある.そこで本研究では,複数ドローンの経路計画時の計算時間を短縮することを目的とし,時空間ボクセル予約の階層管理による効率的な経路計画手法を提案する.
ダイナミックマップを用いた通信相手特定によるユニキャストV2X通信の効率化(松本 翔汰)
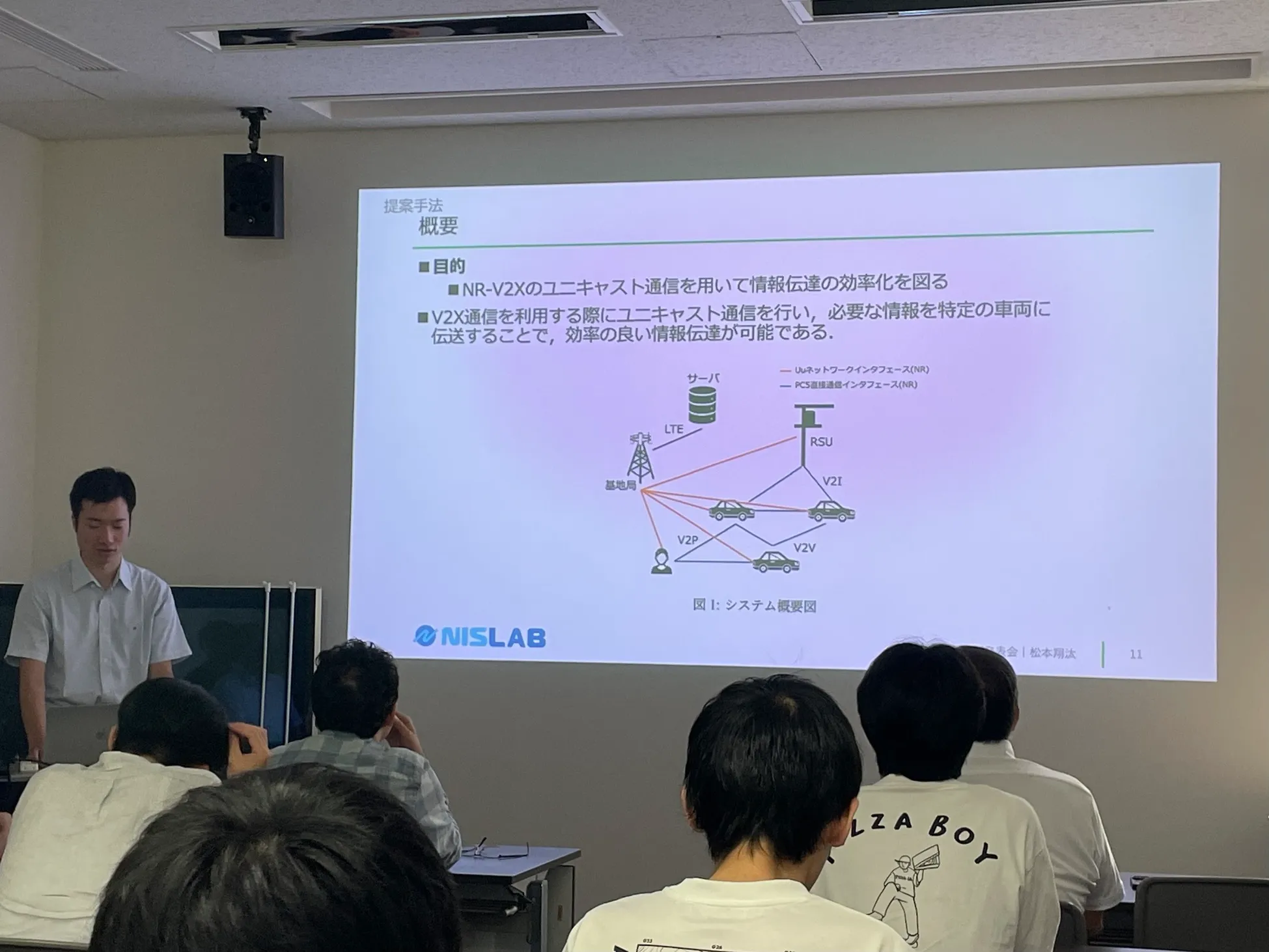
近年自動運転の技術が普及しつつある.政府の官民ITS構想・ロードマップでは,自家用車における高速道路におけるレベル4を2025年めどに実現する目標を掲げている.このような中,自律型自動運転システムをベースに,通信を用いて入手した交通環境情報等を活用することでより高度な自動運転が行うことが可能となる協調型自動運転の研究が盛んになっている.協調型自動運転の通信手法としてV2V(Vehicle-to-Vehicle)通信,V2I(VehicletoInfrastructure)通信,V2P(Vehicle-to-Pedestrian)通信,V2N(Vehicle-to-Network)通信があり,まとめてV2X通信と呼ばれる.V2X通信を行う際にLTEを利用する場合,LTE-V2Xと呼ばれる.また,近年5G技術の登場により,5Gの通信を用いられる場合があり,これをNR-V2Xと呼ぶ.LTE-V2Xではユニキャスト通信がサポートされておらず,ブロードキャストで通信を行わなければならない.しかし,NR-V2Xはユニキャスト通信がサポートされている.本研究では,各車両の位置や,速度などの情報をサーバに集約し,それらの情報をNR-V2Xのユニキャストで特定の相手に送信することを想定する.情報をブロードキャストする場合とユニキャストする場合の送信成功率などを比較し,V2X通信の効率化を図る.
BYTEに基づく多段階分類による物体追跡手法の提案(岩井 駿人)
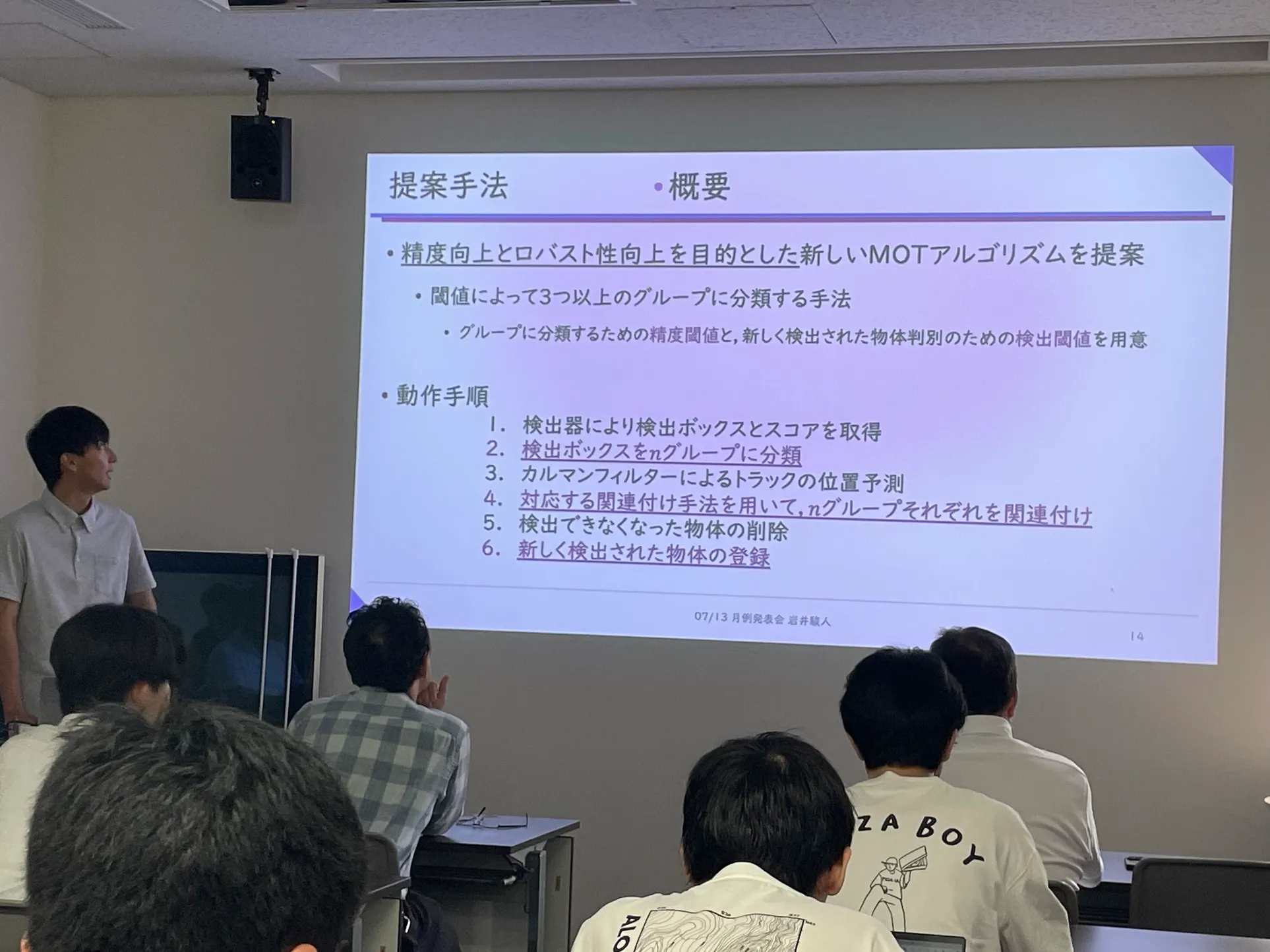
近年,物体追跡(MultipleObjectTracking,以降MOT)の研究分野が多くの注目を集めている.これは,自動運転技術や監視システム,ロボティクスなど,様々な分野での応用が期待されているためである.特に,自動運転車の普及に伴い,限られたリソースの中で正確かつリアルタイムで動作するMOT技術の必要性が高まってきている.このような背景から,MOTアルゴリズムの最適化が重要な課題となっている.MOTの実現には,大別して2種類のアルゴリズムが存在する.1つ目がTracking-by-Detectionと呼ばれるもので,検出と追跡のフェーズを分けて考える手法である.検出フェーズでは,検出器によって人物や物体を指す検出ボックスを探す.追跡フェーズでは,これまでの追跡結果であるトラックレットと検出ボックスを関連付ける.つまり,検出器と関連付け手法がTracking-by-Detectionの要になり,もう片方の手法に比べ精度が高くなりやすい特徴がある.2つ目がEnd-to-Endと呼ばれるもので,物体検出と追跡をまとめて考える手法である.こちらは処理速度が速くなりやすい特徴がある.MOTの性能評価には,MOT20やMOT17というデータセットが,アルゴリズムのベンチマークとして広く用いられている.これらのデータセットを基に,数多くのアルゴリズムが提案・実装されてきた.本研究では,現段階でMOT20やMOT17などにおいて,世界最大レベルの性能を記録しているBYTEと呼ばれるアルゴリズムに着目する.BYTEを改良したアルゴリズムは多く存在するが,本研究では追跡精度と閾値に対するロバスト性に焦点を当てたMOTアルゴリズムを提案する.