2022年1月8日の第134回月例発表発表会(M2)において,奥西 理貴(M2),中井 綾一(M2),中田 輝(M2),田中 佳輝(M2),細野 航平(M2),林 聡一郎 (M2),東山 紘樹(M2)の7名が以下のタイトルで発表を行いました.
ヘテロジニアスネットワークでのモバイル端末における到達性を考慮したマルチパス QUIC のパケットスケジューラ (奥西 理貴)
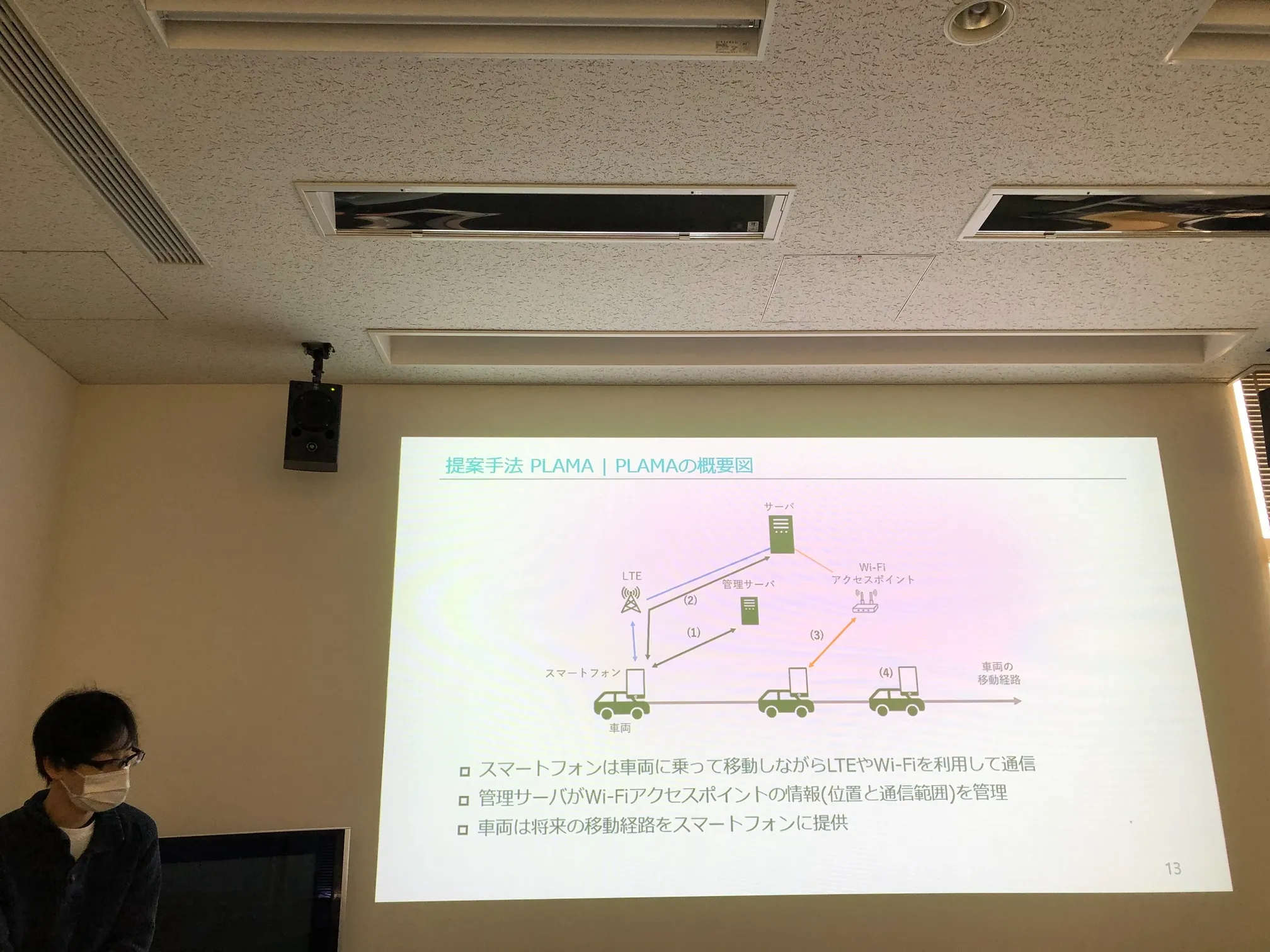
公共交通機関や自家用車での移動中にスマートフォンを用いてビデオストリーミングやゲームなどの大容量コンテンツを楽しむ機会が増加している.こうしたコンテンツの利用に十分な帯域を確保するため,スマートフォンに搭載されているセルラ通信や無線 LAN など複数のインターフェースを同時に使用することが重要となる.これをトランスポート層で制御し実現する技術が,マルチパストランスポートプロトコルである.一方で,スマートフォンの移動によって無線 LAN が通信範囲外となり,無線 LAN を介する通信経路上に送信された一部のパケットがスマートフォンに到達できず,パケットロスとなる状況が想定される.そのため,パケットの到達性を考慮して送信する通信 経路を選択することが重要となる.
本研究では,スマートフォンが事前に取得した周辺の基地局やアクセスポイントの情報と,公共交通機関や自動車から取得した将来の移動経路に基づき,走行位置ごとにパケットを送信する通信経路を適切に選択することで,移動に伴い発生するパケットロスを削減する手法を提案する.
V2X 通信プライバシ向上のための周辺車両数に応じた可変仮想車両による仮名方式 (中井 綾一)
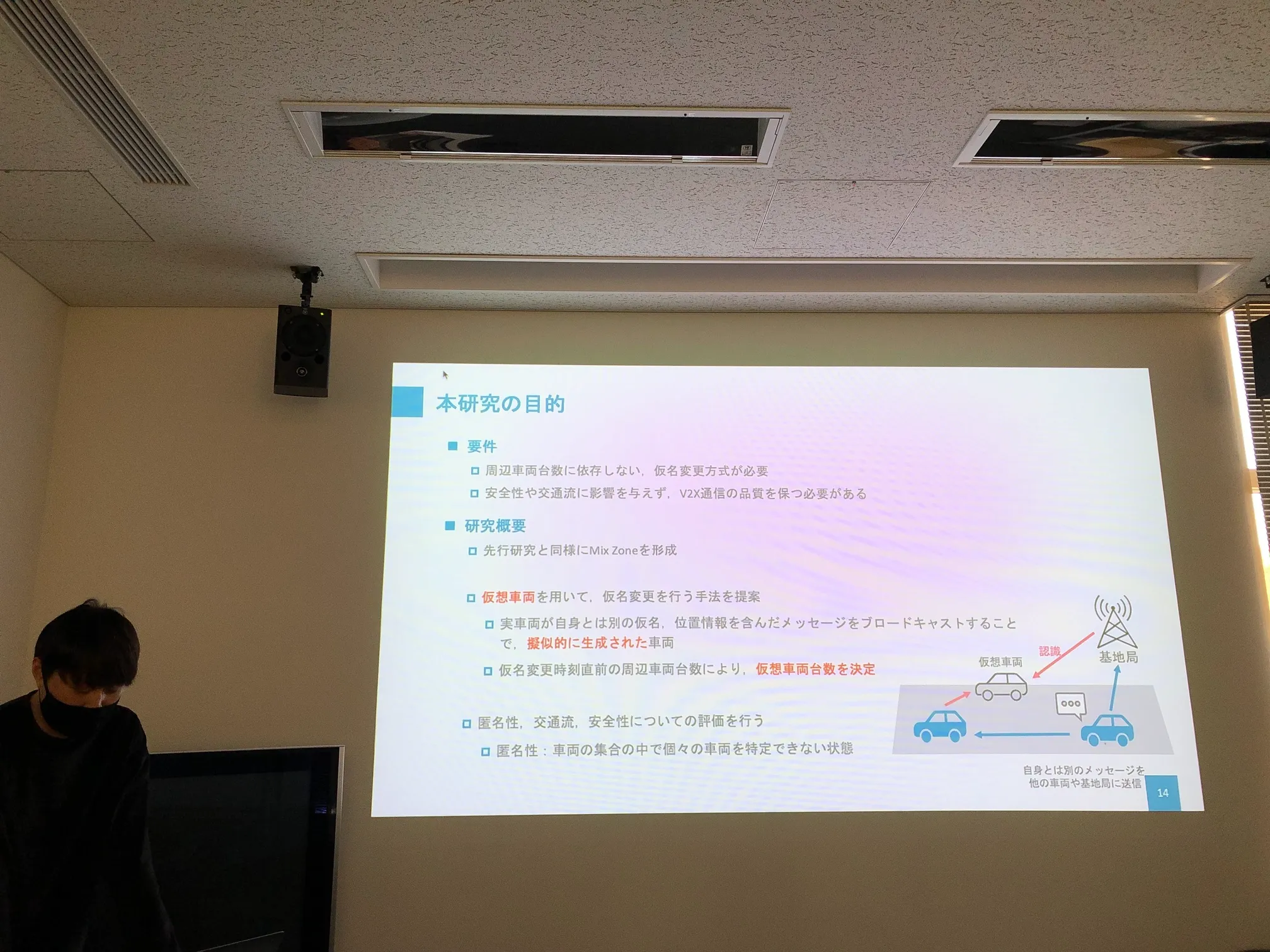
近年,V2X(Vehicle to Everything) 通信に関しての研究が盛んに行われている.この V2X 通信により,車両の事故防止や交通渋滞の削減につながることが期待されている.しかし,V2X 通信を用いたアプリケーションでは,利便性のために,位置情報や個人情報を周辺機器に送信することから,プライバシ保護が重要な課題となる.
この課題を解決する有効な手法として,仮名を用いた手法が知られている.仮名とは,特定の車両の位置情報な どを追跡できないようにするため,V2X 通信機器に割り当 てられる仮の識別子である.
本研究では,周辺車両台数に応じて,擬似的に生成した仮想車両同士で協調的に仮名を変更することで,攻撃者による位置追跡を困難にさせる手法を提案する.
時空間グリッド予約を実現するマイクロロードプライシングのブロックチェーン管理による高速化 (中田 輝)
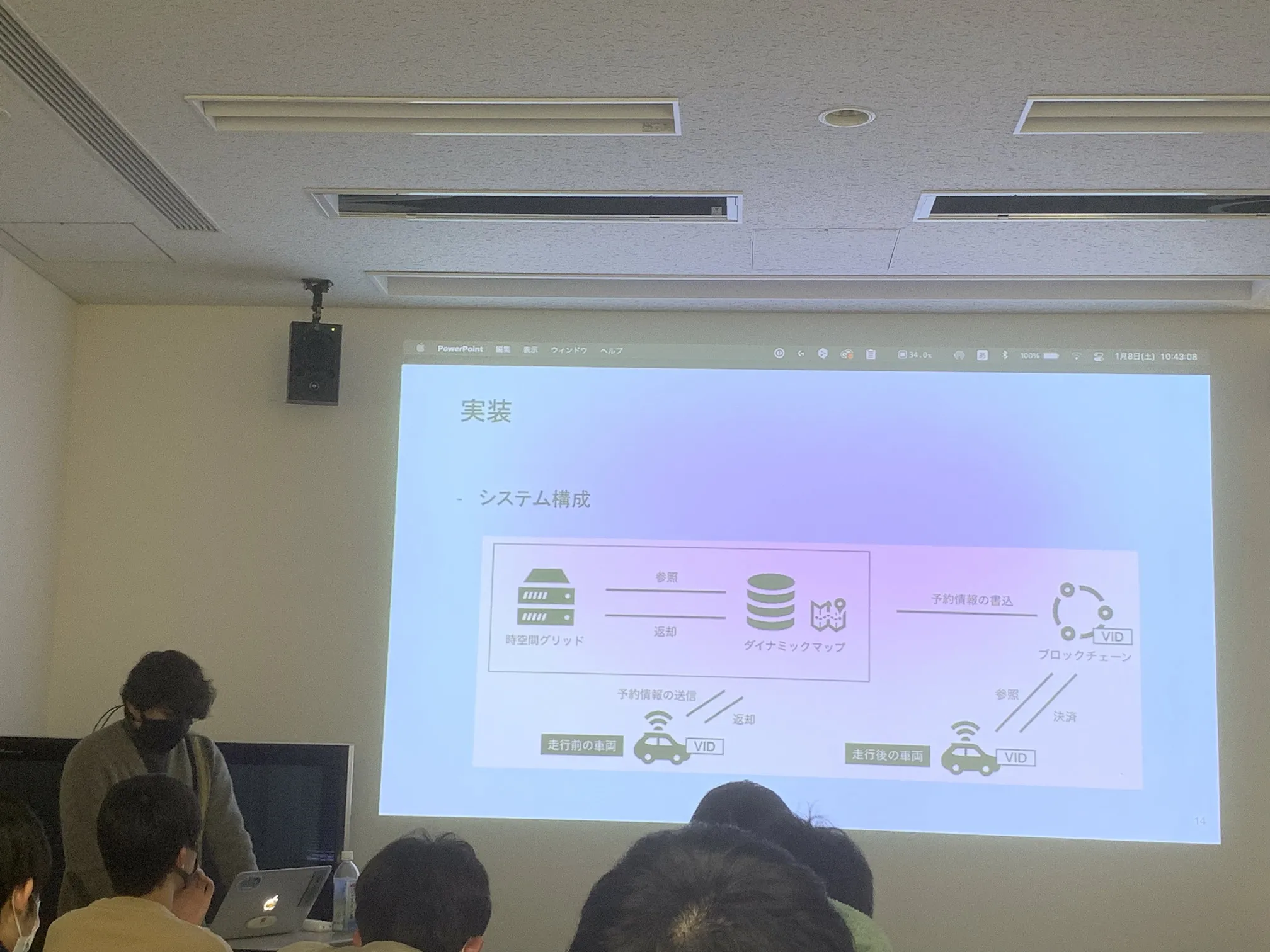
近年,静的な地図上に動的な情報を重ね合わせた仮想的なデータベースであるダイナミックマップに関する研究が進められており,協調型自動運転車両の走行調停において重要な役割を果たすと期待されている.その応用として, このダイナミックマップを利用することによって,自動運転車がこれから走行をする経路の時間と空間を事前に予約し,他の車両を排除することでよりスムーズな走行を可能にする時空間グリッド予約という考え方を確立した.この際,ダイナミックマップでの時空間グリッド予約に料金徴収による優先度を設けるために,道路をグリッドに分割しそれぞれに値段を付け仮想通貨によって支払いを行うマイクロロードプライシングという方式を考え,その実現性に ついての検証を行った.その結果,交差点などの限定的な範囲での実現可能性が示され,ガソリン税に代わる新たな収入源の確保としても期待できることが分かった.
本研究ではこれを発展させ,予約情報の管理をブロックチェーン上で行うことで予約の処理と予約料金の支払いを分離する.これにより,提案するシステムを高速化し,より広範囲での実現を目指す.
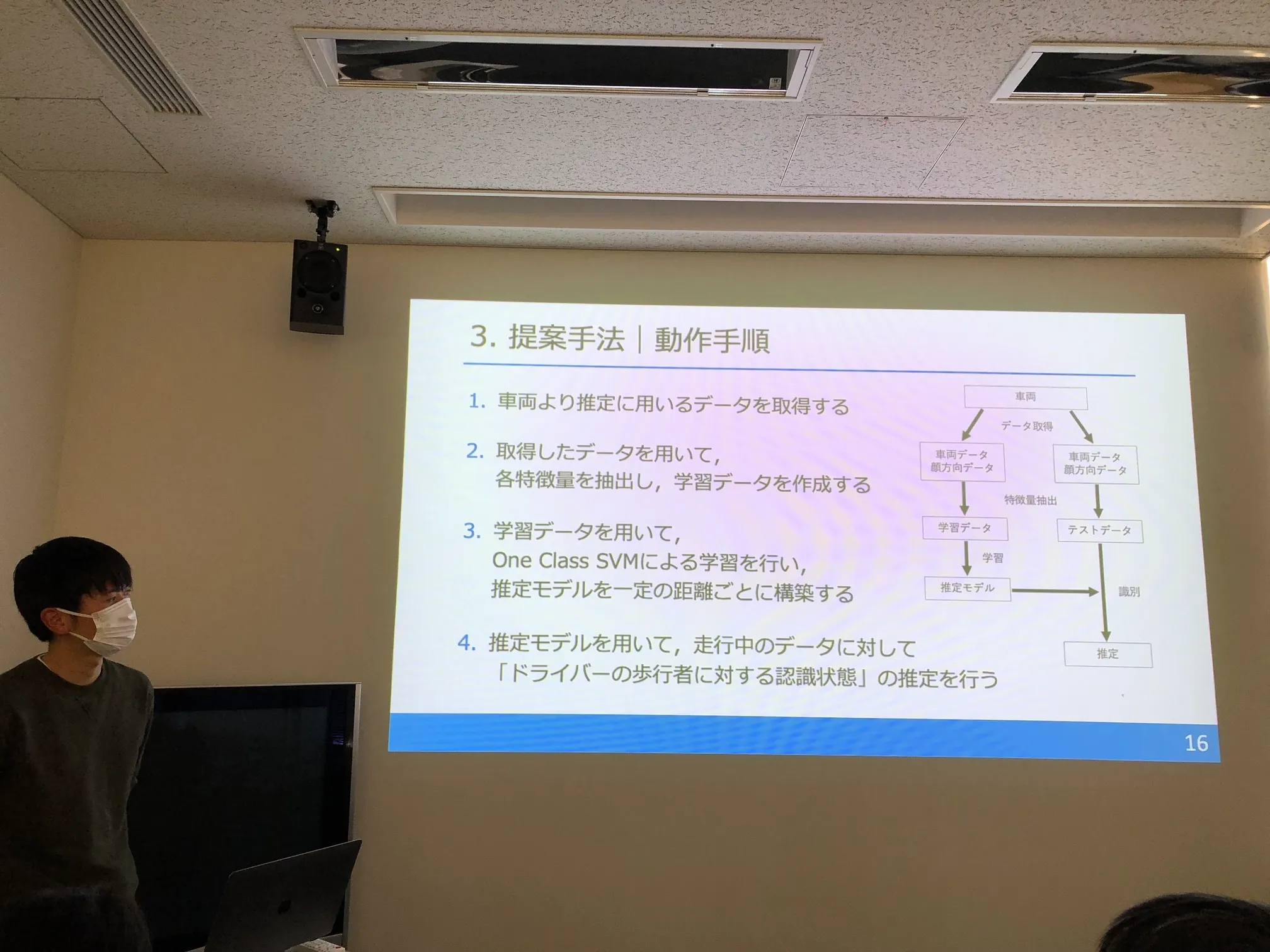
走行情報と顔方向に基づくドライバーの歩行者に対する認識の推定 (田中 佳輝)
近年,ITS の分野において研究開発が活発に行われ,道路交通の安全性や利便性の向上を目的とした様々な運転支援システムが普及してきている.その中の1つに,衝突の危険がある際にドライバーに対して警報や警告を行うことで安全運転を支援する衝突警告システムがある.このシステムは,車両に搭載されたカメラやミリ波レーダーなどのセンサを利用し,車両や歩行者などの対象物との距離や相対速度をセンシングすることで実現される.また,V2X 通信を利用することで,周辺の車両や歩行者との位置情報や速度情報などの共有が可能となり,それらの情報を利用した協調型運転支援システムの研究が行われている.このようなシステムでは,センシングのみでは得られない情報を利用した運転支援が可能となり,より安全性や利便性の高い運転支援が実現できると期待されている.
しかし,現在検討されている協調型運転支援システムは,ドライバーの周辺環境に対する認識状態を考慮した運転支援を行っていない.例えば,周辺に存在する全ての歩行者に対して警告を行った場合,既に認識している歩行者に対する警告による煩わしさや警告に対する慣れによる効果の低下,システムへの信頼性の低下といった問題が発生する.そのため,衝突警告システムにおいて,ドライバーの歩行者に対する認識状態を推定することができれば,既に認識 している歩行者に対する警告を削減し,警告に対する煩わしさや慣れによる効果の低下,システムへの信頼性の低下を軽減するなど,より効果的な情報提供の手法を検討することが可能となる.
協調型自動運転に向けたエッジサーバ利用によるダイナミックマップシステムの開発 (細野 航平)
車両に搭載されたセンサで認識できる範囲は限定的であり,周囲の車両や道路インフラ装置のセンサが検出した情報を,通信を介して共有することにより,安全性向上を目指した協調型自動運転の研究が行われている.ダイナミックマップは,高精度道路地図上にセンサなどから得た動的な情報を重畳できるようにした情報通信プラットフォームで,自動運転等の高度な交通サービスを支える上で必要な情報基盤と考えられている.ダイナミックマップの動的情報として,一般に100ミリ秒周期で車両から送信されるセンサ情報などが管理され,これに基づいてアプリケーションが動作するため,低遅延での情報処理が求められる.ダイナミックマップはインターネット上のクラウドの利用を想定するが,クラウドに膨大な車両からのデータが集約されると処理負荷や通信遅延の原因となり,スケーラビリティが問題になると考えられる.
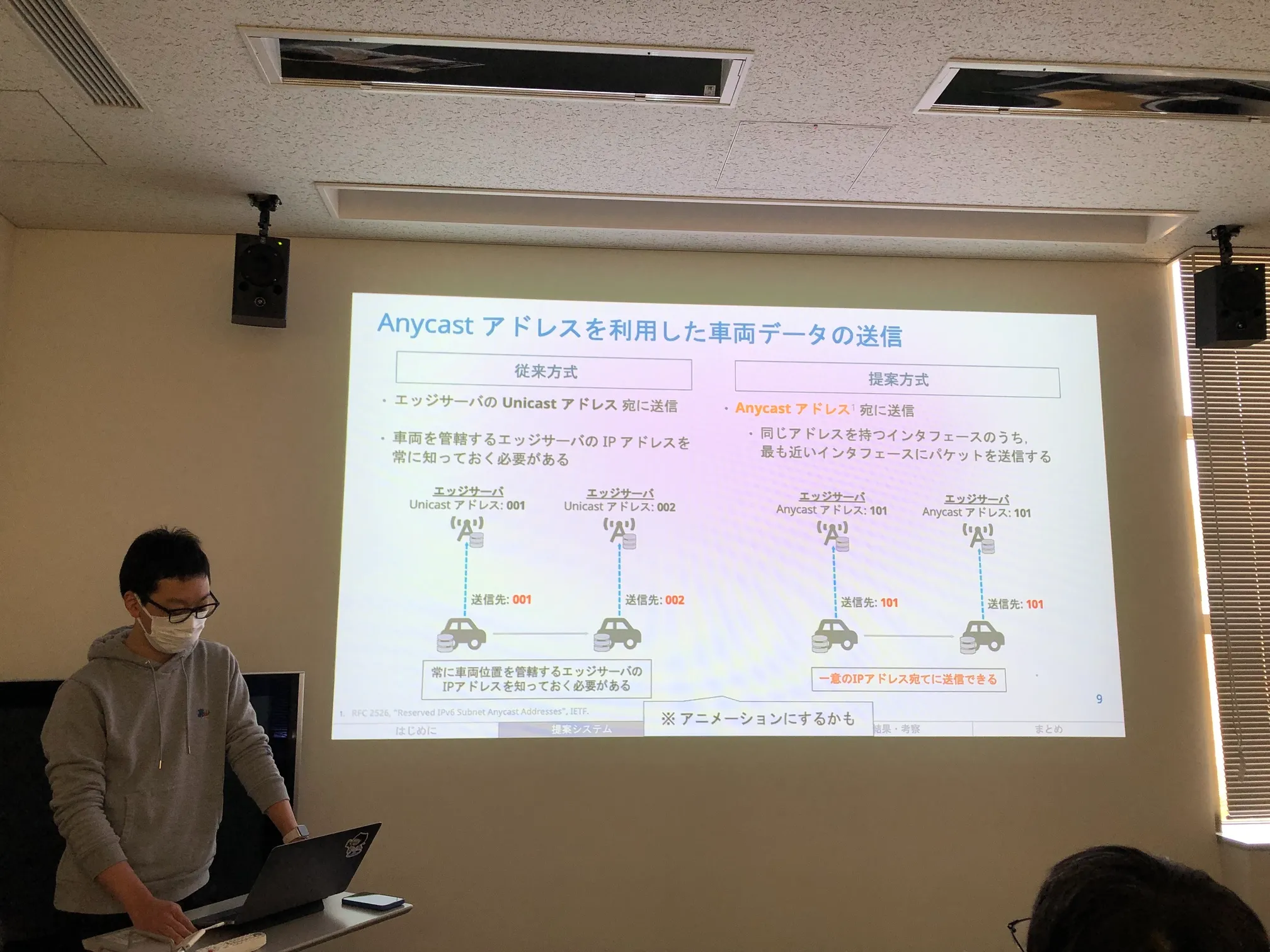
そこで,クラウドと車両の間にエッジサーバを配置することで,処理負荷の分散や通信遅延の軽減が期待されている .車両から送信されたデータを,地理的に分散配置されたエッジサーバで逐次処理し,処理結果を車両へと通知する.しかし,ダイナミックマップにおいて,エッジサーバは車両データをリアルタイムに処理するだけでなく,対象となるエリア内の全ての車両データを集約する必要がある.また,高速に移動する車両とエッジサーバとの接続方法や車両の管理方法も問題となる.さらに,車両から送信されたデータが意図しないエッジサーバに受信された場合は,適切なエッジサーバにデータを転送する必要がある.本研究では,クラウドのスケーラビリティの問題を軽減するため,エッジサーバを配置し,道路上を移動する複数の車両とエッジサーバの地理的な連携の課題を解決するダイナミックマップシステムを開発する.
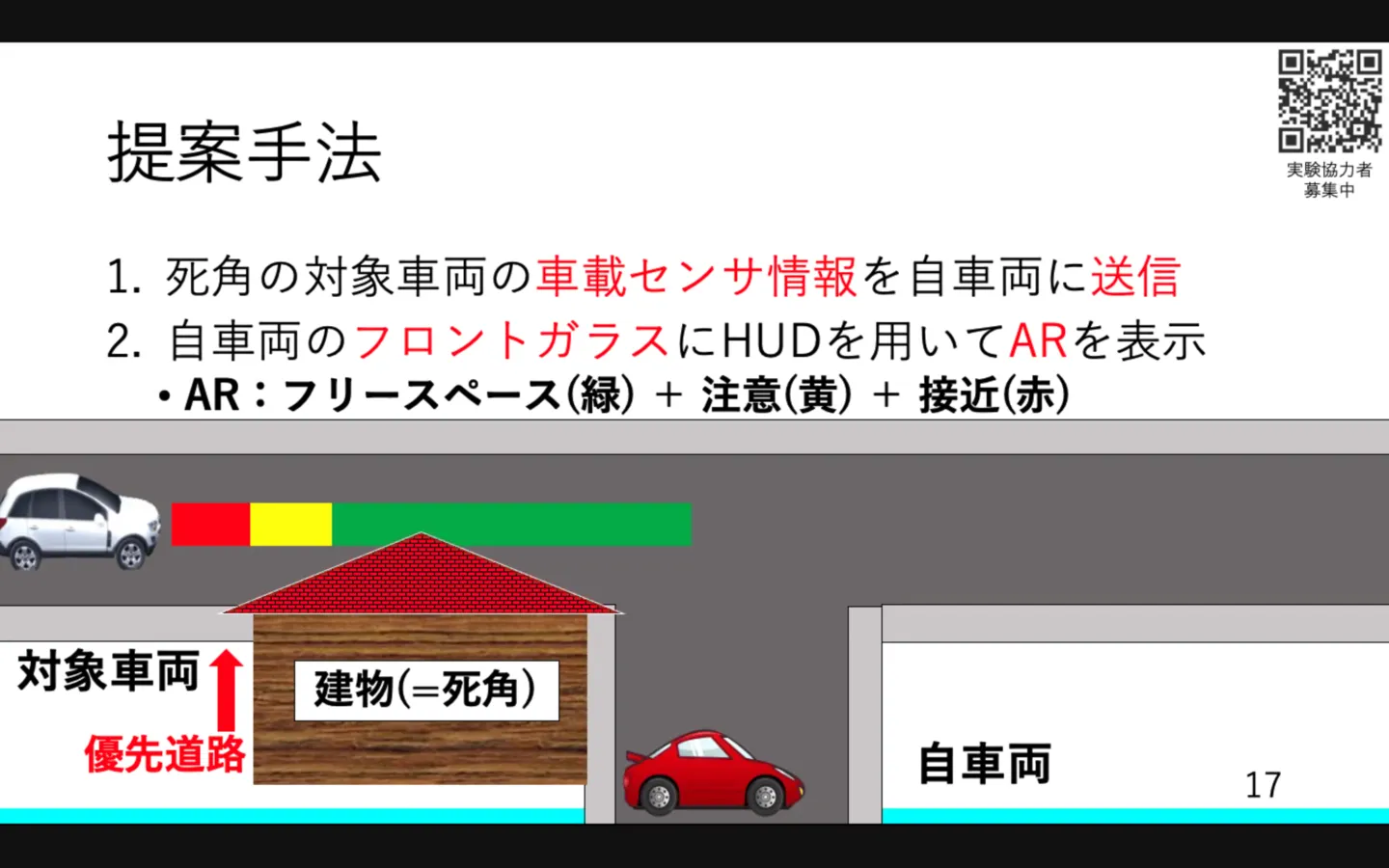
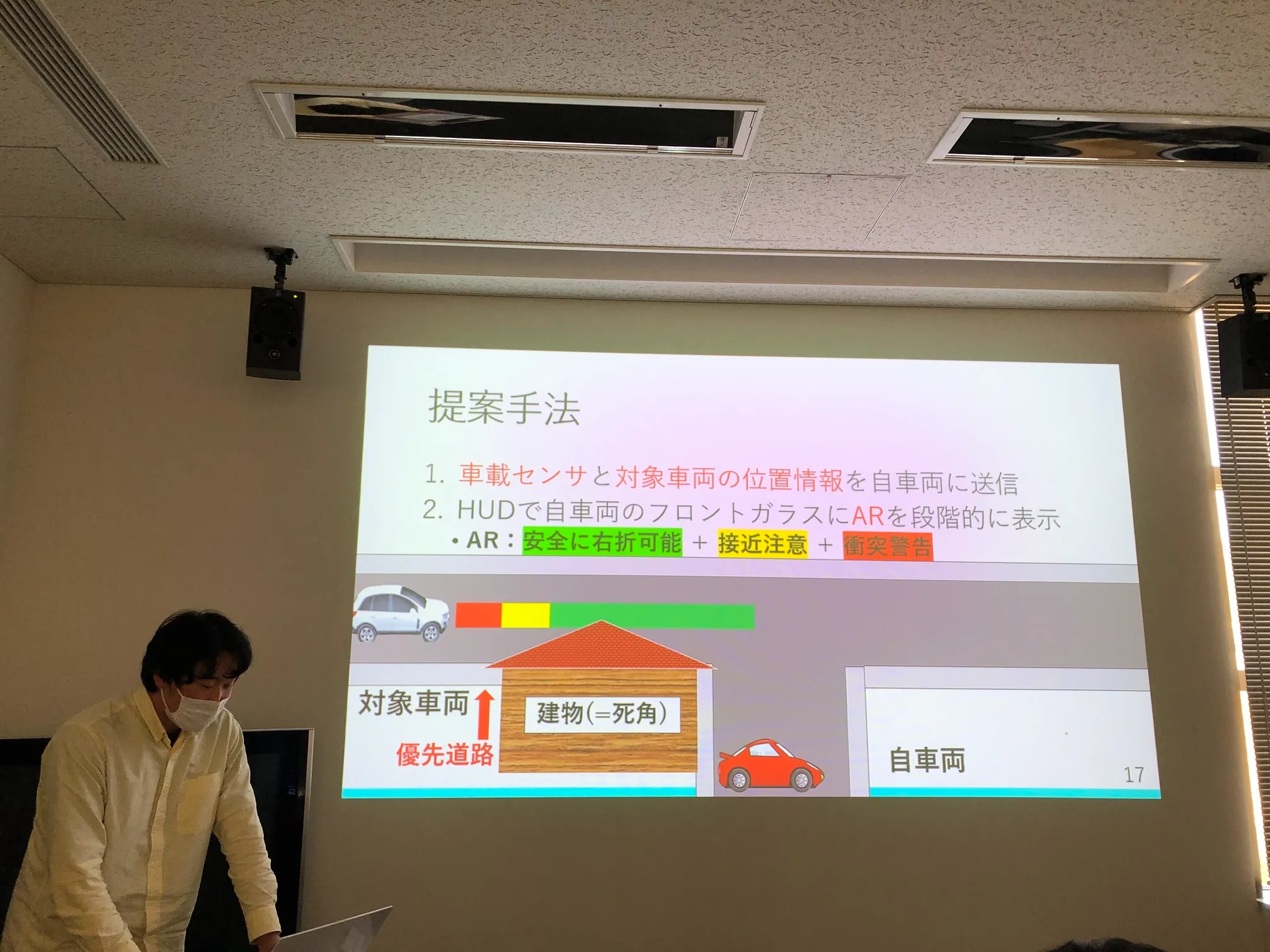
安全運転支援のための AR を利用したフリースペースの段階的可視化手法 (林 聡一郎)
車両同士の交通事故の中でも追突についで出会い頭衝突が多発している.その原因の1つとして,交差点による死角で対象車両の認識が困難となることが挙げられる.現在 は,高度交通システム (ITS:Intelligent Transport Systems) で活用される技術によって見通しの悪い交差点における安全運転支援の研究が行われている.しかし,交差点における死角による衝突事故は減少する傾向にとどまる.よって,安全運転支援システムで用いられる車載センサや無線通信機能,ディスプレイを活用した新たな安全運転支援システムを検討する必要がある.
安全運転支援システムでは,一般に普及しつつあるス テレオカメラやレーザー光を用いる LiDAR で距離測定や物体検出が可能である.また,5G や Wi-Fi といった無線通信規格によって車車間通信が可能である.さらに,HUD(Head Up Display) によって車両のフロントガラスに AR を表示してドライバに情報を提示できる.
本研究では,車載センサや無線通信機能,HUD を活用し,死角のある交差点における車両同士の衝突事故を防止する新たな安全運転支援システムを提案する.
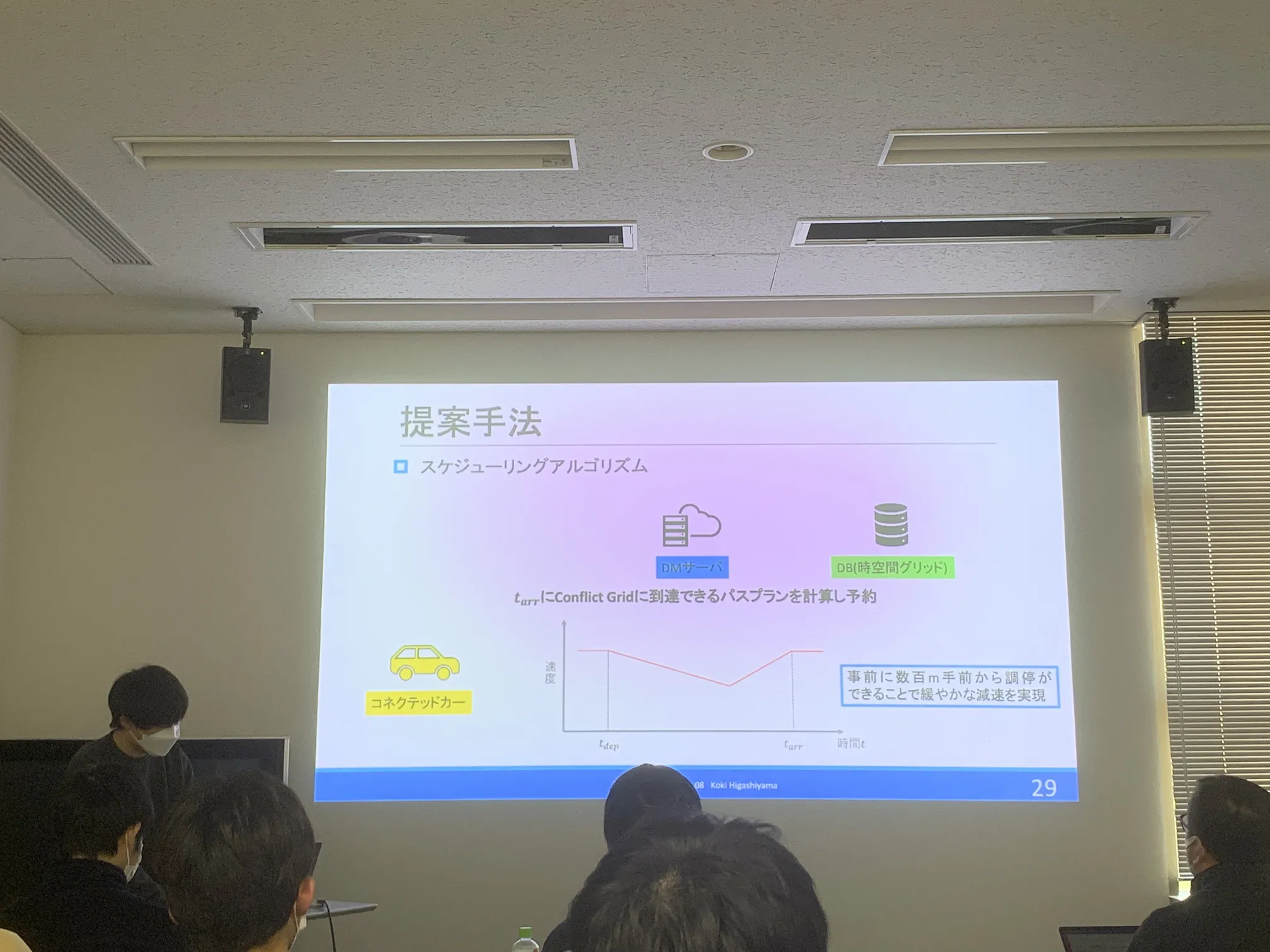
ダイナミックマップの時空間グリッド予約による道路合流調停手法 (東山 紘樹)
近年,自動運転に関する研究が盛んにおこなわれている.車両が自らのセンサで周囲の状況を把握し自律的に自動走行を行うものに加えて,通信を用いて他の車両やインフラと情報を共有して協調型自動運転を実現するコネクテッドカーについても検討が進められている.
コネクテッドカーの走行調停手法としてダイナミック マップ(DM)による時空間グリッド予約の利用が検討さ れている.先行研究ではこの基礎となる仕組みを単一 交差点を想定して構築し,通信における計算量について考察が行われ,他の通信を用いる走行調停手法に比べた優位性を示した.しかし,車両挙動が考慮されていないという問題点がある.そこで本研究では,問題点の解決と高速道路を想定した合流部での調停に適したアルゴリズムを検討する.