2024年12月21日の第163回月例発表会において,森 梓恩 (B4),藤原 直己(B4),松浦 薫(B4),徳重 柊人(B4),富成 泰生(B4),野田 虎之介(B4),井若 勇志(B4),ケイ コウゼン(M1)の8名が以下のタイトルで発表を行いました.
車両位置情報を利用した車車間通信隠れ端末問題軽減のための無線リソース割り当て手法の検討(森 梓恩)
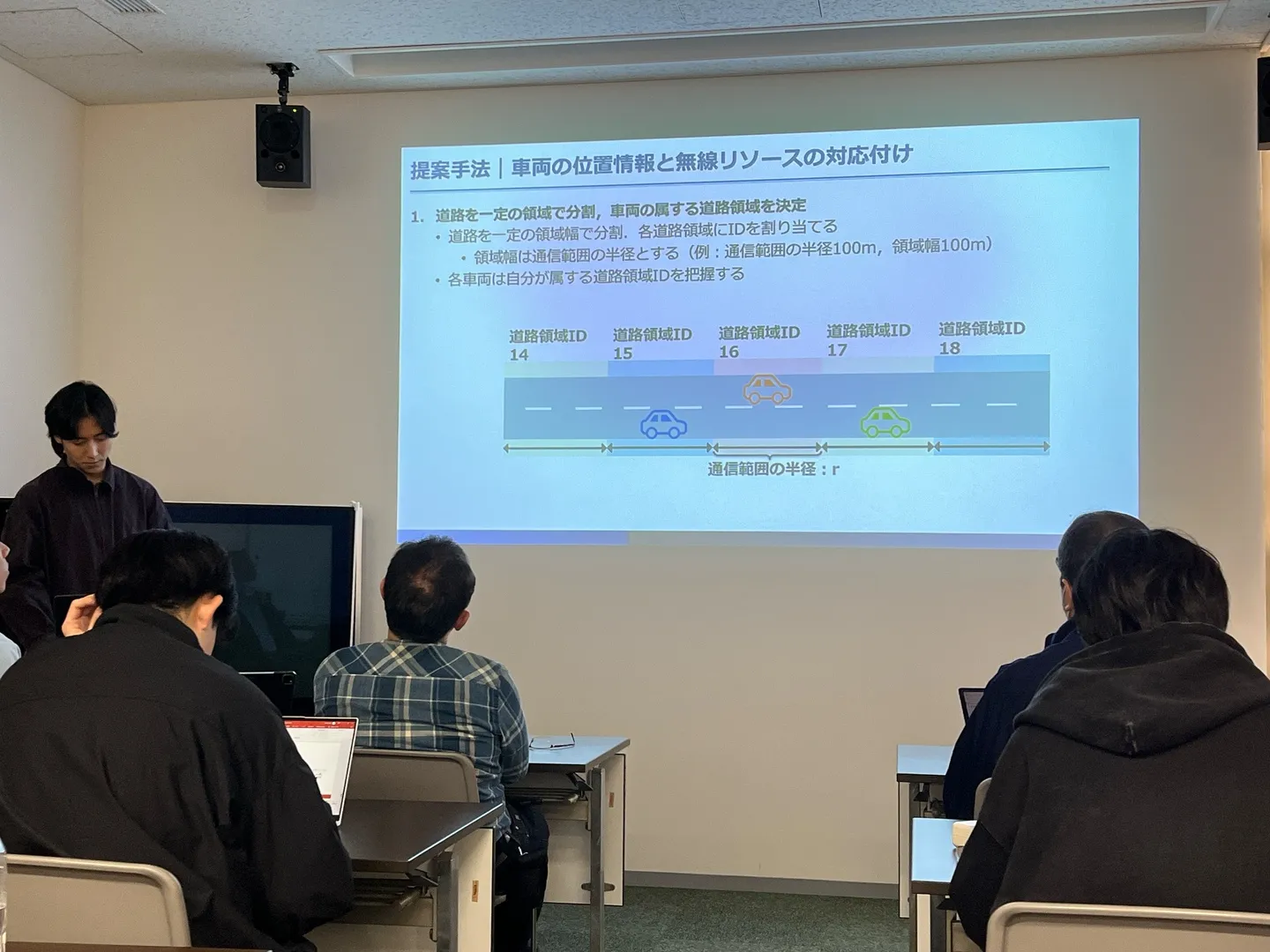
高信頼・低遅延な車車間通信の実現のために、セルラ通信を活用したCellular V2X (C-V2X)が注目されている。C-V2Xにおける車車間通信では、パケットを送信する時間と周波数を表す無線リソースに対して、無線リソースの使用状況や無線リソース予約情報を基に無線リソースを自律的に選択するSPS (Semi-Persistent Scheduling)方式が導入されている。しかし、SPS方式では隠れ端末問題が考慮されていない。隠れ端末問題とは、互いに通信範囲外に位置する隠れ端末車両同士が同じ無線リソースを選択している場合、隠れ端末車両同士の通信範囲が重なる重畳領域に位置するさらし端末車両において、パケット衝突が発生し、パケットが受信できないという問題である。そこで、隠れ端末問題が発生する恐れがある隠れ端末車両同士が異なる無線リソースを選択するように、車両位置情報と無線リソースを対応付ける無線リソース割り当て手法を検討する。車車間通信のシミュレーションにおいて、パケット受信率、パケット衝突率、スケジューリング遅延を評価する。
時空間ボクセル予約による複数ドローンの飛行調停手法の検討(藤原 直己)

近年、物流業界では労働力不足の深刻化やカーボンニュートラルへの対応が課題となっている。ドローンは、国土交通省の総合物流施策大綱において、物流における重要な新技術のひとつとして位置付けられており、都市部のような建造物等の構造物が多数存在する環境においての活用が検討されている。ドローンを配送システムとして運用する際、ドローンが環境内で複数台飛行する場合は、周辺環境の障害物だけでなく、他のドローンとの衝突を避けるために衝突回避行動をとる必要がある。ドローンの衝突回避方法には、各々のドローンが障害物を感知することで衝突を回避する方法と、ドローン同士が位置情報などの情報を共有することで衝突を回避する方法がある。しかし、ドローンの台数が増えることによる空域の混雑や、構造物が多数存在する環境での飛行は衝突回避性能の低下を引き起こすという問題がある。そこで本研究では、構造物が多数存在する環境において、ドローンの台数が増加しても衝突回避性能を維持することを目的とし、時空間ボクセル予約による複数ドローンの飛行調停手法を検討する。
メディア配信の安定性を考慮したマルチパスQUICのバックアップパケットスケジューリングの検討(松浦 薫)
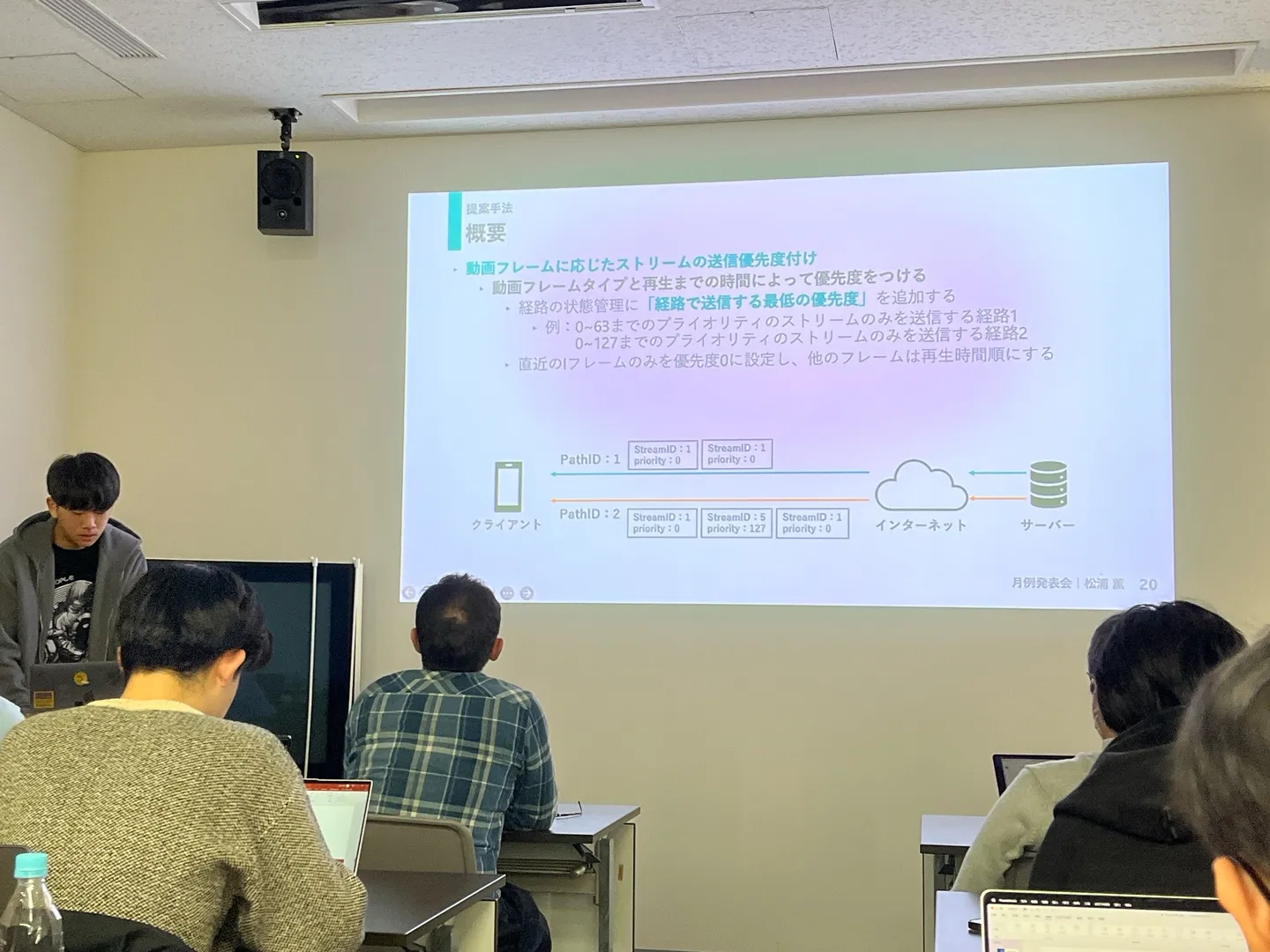
近年,スマートフォンなどのモバイル端末が普及し,動画配信や音楽など様々なメディアストリーミングコンテンツが展開されている.これらの大容量コンテンツを快適に利用するためには継続的に通信帯域を確保することが重要となる.
AR環境におけるタッチタイピング可能な仮想入力インターフェースの検討(徳重 柊人)
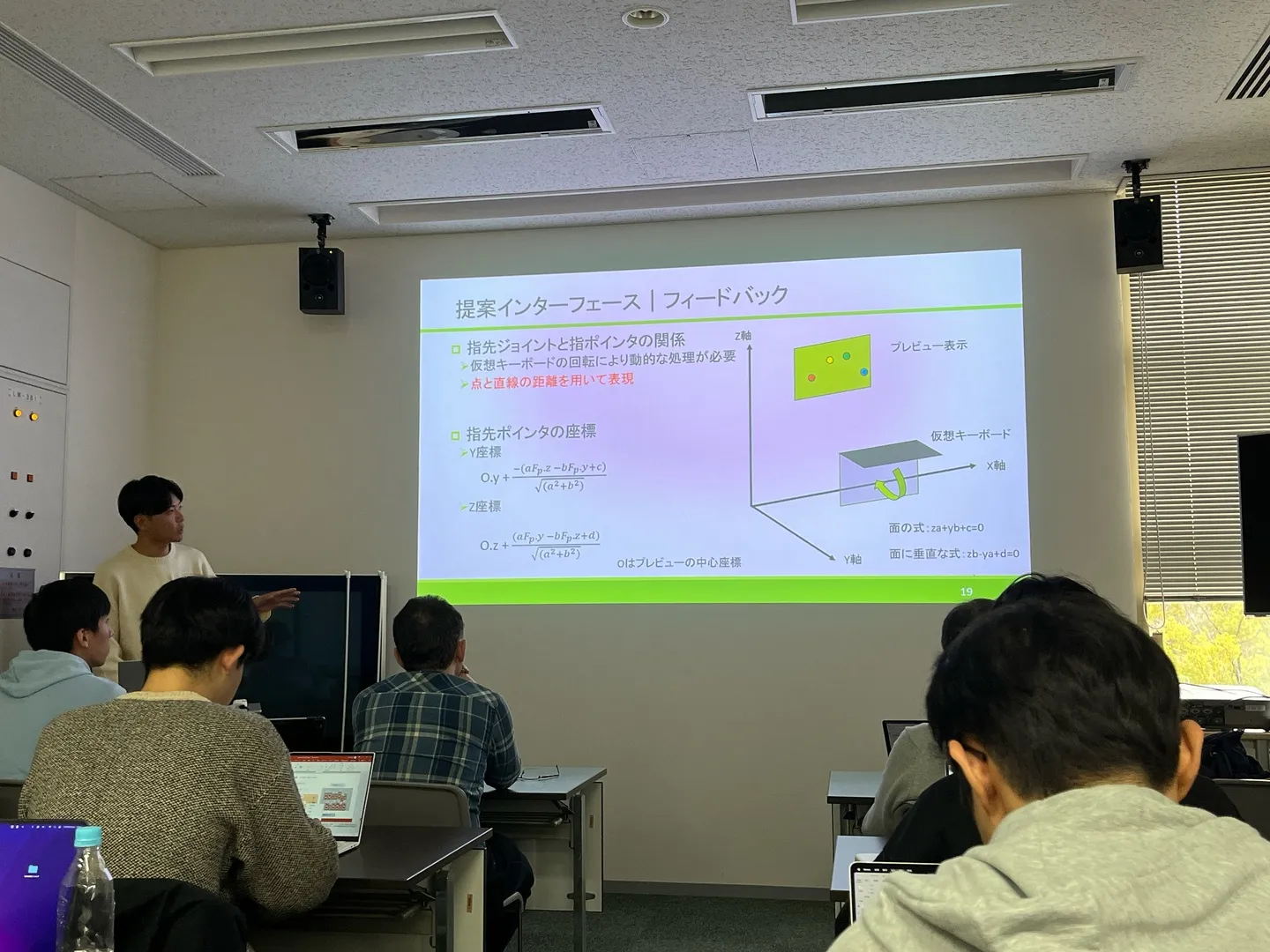
近年、AR (Augmented Reality)に関する研究が進展しており、特にHMD (Head Mount Display)を用いたARHMDは、汎用的な対話型情報端末としての利用が検討されている。ARHMDにおける入力インターフェースには、コントローラや物理キーボードなどの物理デバイスを用いる手法と、手を用いる手法が存在する。物理デバイスによる入力は直感的な操作が可能であるが、ARHMDに加えて入力機器が必要となる。一方、手を用いた入力は仮想的なオブジェクトに直接触れて操作する形式であり、ARHMDのみでの入力が可能になる。しかし、課題として、複数の指による入力が困難である点や、手が視界に入ることで視認性が低下する点が挙げられる。また、キーを直接操作する必要があるため、視線や頭部、腕の動きが求められ、物理デバイスと比較して入力速度やユーザビリティが低下する問題も指摘されている。本研究では、AR環境での入力をより効率的で使いやすいものにするため、頭部や視線の移動を抑えたタッチタイピング入力が可能な仮想入力インターフェースを提案し、被験者実験を通じてその有用性を検討する。
路側センサと歩行者端末の統合利用による歩行者移動情報を活用した歩行者特定の精度向上(富成 泰生)
近年、交通事故の発生件数や死傷者数は年々減少傾向にある。しかしながら、依然として歩行中の交通事故における重傷者数は6,800件に達しており、衝突事故防止技術のさらなる高度化が求められている。こうした課題を受け、路側センサやカメラを用いた歩行者特定の研究が進んでいるものの、歩行者への直接的な警告を行うことは難しい状況にある。車両だけでなく歩行者にも警告を提供することで、交通事故の軽減が期待できる。歩行者の情報を検知する手段としては、路側センサであるLiDARと、歩行者端末であるスマートフォンに搭載されたGPSセンサが挙げられる。LiDARは検出範囲内で高精度に歩行者の位置情報を取得できる。一方、GPSセンサは5~10mの誤差があるものの、歩行者の属性や速度情報といった歩行に関する情報を取得可能である。LiDARから取得できる高精度な歩行者の位置および速度情報と、GPSセンサから得られる位置および速度情報を組み合わせることで、LiDARが検知した歩行者とその歩行者が所持するスマートフォンを一致させて特定することが可能となり、歩行者への警告が実現できる。そこで本研究では、路側センサと歩行者端末を統合利用し、位置および速度情報に加えて歩行者の移動情報として軌跡情報を活用することで、歩行者特定の精度向上を目指す。
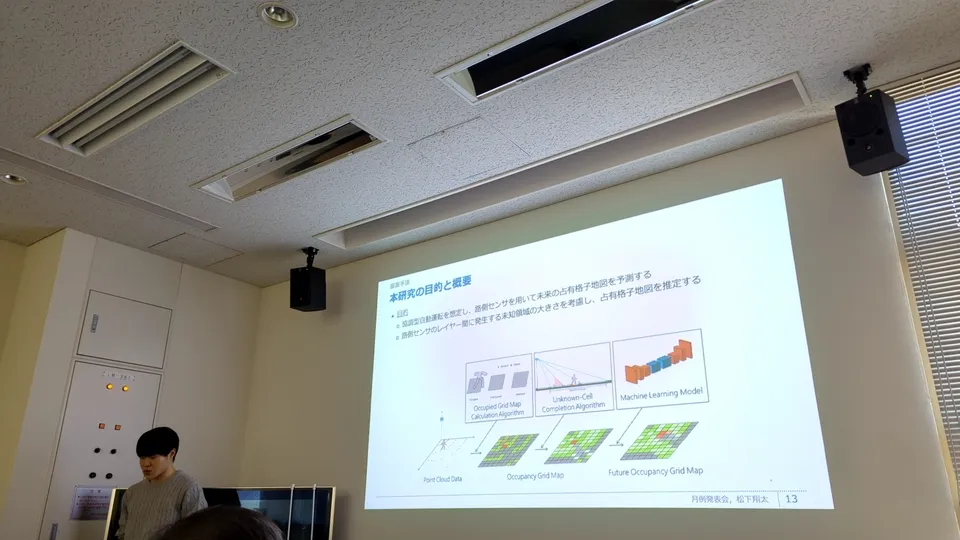
ダイナミックマップシステムのための車両走行環境に基づくエッジサーバ動的負荷分散手法(野田 虎之介)

車両や路側センサから取得した動的な情報を高精度道路地図に重畳することが可能な情報通信プラットフォームであるダイナミックマップシステムは、自動運転をはじめとする高度な交通サービスを支えるために必要不可欠な情報基盤である。従来のクラウドコンピューティングを基盤とする中央集約型ダイナミックマップシステムでは、大量のアクセスに伴う処理負荷の増大や通信遅延が課題とされてきた。これに対し、現在ではエッジサーバを地理的に分散配置し、各エッジサーバで車両や路側センサからのデータを管理する分散型システムが研究開発されており、このアプローチにより処理負荷の分散および通信遅延の低減が期待されている。しかしながら、従来のエッジサーバを用いたダイナミックマップシステムには、エッジサーバの計算資源が限られていることや、車両が位置している場所の地理的な情報が必要不可欠であるため、負荷分散が困難なシステム構造という課題がある。そのため、特定のエッジサーバにアクセスが集中した場合、計算資源が不足し、交通安全に関わるサービスの提供に支障をきたす恐れがある。本研究では、特定のエッジサーバへのアクセスが増加した際、そのエッジサーバが性能を維持できなくなる問題を解決するため、車両が集中し計算資源が逼迫しているエッジサーバの管轄エリアの一部を隣接するエッジサーバに移譲することで負荷分散を実現する手法を提案する。
時空間グリッド予約における空間効率を考慮した自動バレー駐車制御方式の提案(井若 勇志)

近年、搭乗者の乗降場所から駐車場内の駐車スペースに車両を自動で駐車し、必要な時に乗降場所まで自動で車両を呼び出すことができる自動バレー駐車に関する研究が進展している。ドイツでは、無人かつ自動で駐車可能な自動バレー駐車が承認され、世界的に注目を集めている。複数の車両が効率的に自動バレー駐車を行うには、各車両間で走行を調停する仕組みが必要である。この課題に対し、ダイナミックマップにおける時空間グリッド予約を利用した自動バレー駐車が提案されている。先行研究では、従来の方式と比較して待ち時間が削減され、駐車場回転効率の向上が示された。しかし、この方式では車両サイズを考慮しておらず、駐車場の空間を効率的に活用できないという課題がある。そこで本研究では、駐車場全体をグリッドに分割し、各車両に対して複数のグリッドを予約することで、車両サイズの違いに対応可能な自動バレー駐車制御方式を提案する。また、時空間グリッド予約を活用して駐車スペースを動的に確保することで、駐車場の空間効率向上を図る。
Reducing Latency in ITS with KCP and Edge Computing with Intelligent Load Balancing Algorithms(ケイ コウゼン)
The Internet of Vehicles (IoV) is an emerging technology for smart cities, enabling connected vehicles to publish driving data that Intelligent Transportation Systems (ITS) can subscribe to for providing cooperative services. The event-driven architecture, characterized by its ability to react to real-time service functions based on event triggers, is well-suited for developing situation-aware traffic applications. However, due to vehicle mobility and limited bandwidth in wireless communication, data generated by vehicles and transmitted to remote vehicular clouds may experience delays or be lost. These challenges can adversely impact the accuracy and responsiveness of cooperative services hosted in the cloud. Addressing these network issues is crucial for event-driven ITS systems, which rely on timely and reliable data delivery .KCP, a low-latency Automatic Repeat-reQuest (ARQ) algorithm, enhances communication reliability by incorporating Error Correction Code (ECC) or Forward Error Correction (FEC). Meanwhile, edge computing emerges as a promising paradigm for reducing response latency and saving bandwidth in wireless IoV networks by offloading computation tasks from the cloud to network edges. This approach not only mitigates the impact of network delays but also improves the efficiency and reliability of IoV-based applications.