2024年度の修士論文試問会において,東田 悠希(M2),黄 一凡(M2),松村 学(M2),松下 翔太(M2),森田 暉之(M2),坂本 拓馬(M2),山崎 慎也(M2)の7名が以下のタイトルで発表を行いました.
局所性鋭敏型ハッシュを利用したコネクティッドカーのプライバシ保護方式(東田 悠希)

情報通信技術を搭載したコネクティッドカーは,自車両の速度や位置情報等の車両情報と識別子を含むメッセージを定期的にブロードキャストし,交通の安全や交通流効率化を促進することが期待されている.しかし,このメッセージはほとんどが平文で送信されるため,悪意のある攻撃者にメッセージを盗聴されると,識別子から車両の位置情報を追跡され,運転者の勤務先や自宅などのプライバシを侵害される可能性がある.この問題に対し,車両毎に一意に割り当てられた固定の識別子に代わり,仮名と呼ばれる一時的な識別子を用いるプライバシ保護方式が標準化されている.仮名を様々な条件で継続的に変更することにより,識別子を基に車両を特定する攻撃者の追跡を困難なものとする.しかし,このプライバシ保護方式にもリンク攻撃と呼ばれる仮名変更後の車両と仮名変更前の車両を特定する攻撃が存在する.本研究では,より類似する車両情報を持つ類似車両を,近傍点探索アルゴリズムの局所性鋭敏型ハッシュによりクラスタリングし,類似車両で仮名変更のタイミングを統一して仮名を変更することで,より高いプライバシ保護を可能にするプライバシ保護方式を提案する.
Graph Neural Networks for Dynamic Resource Allocation in V2X Communications(黄 一凡)
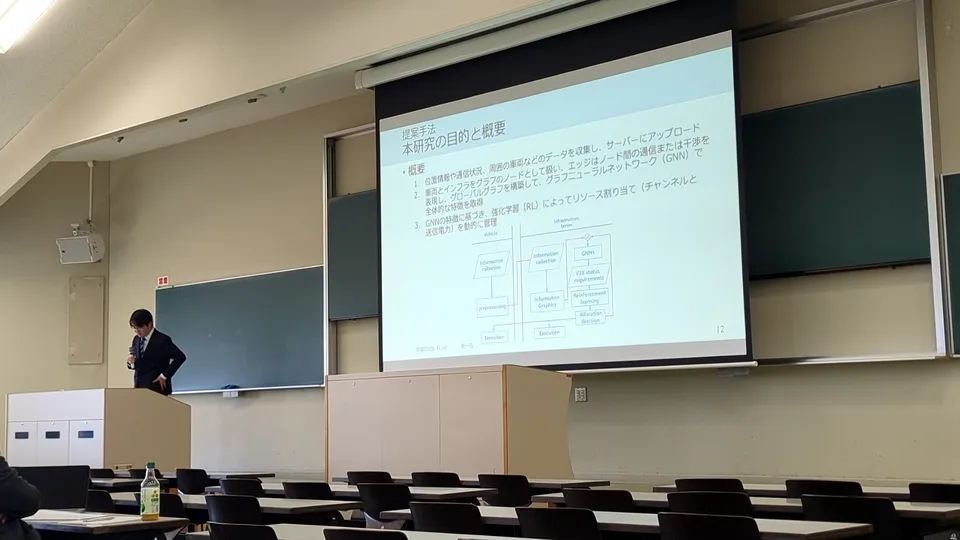
V2X, or "vehicle to everything," refers to the exchange of information between a vehicle and its external environment, enhancing safety and efficiency. This technology enables real-time data transmission without relying on base stations, offering low latency and high reliability essential for autonomous driving. The efficient allocation of communication resources, such as channels and transmission power, is critical to maintaining network performance and mitigating interference. However, classic optimization algorithms, while effective in static environments, struggle to adapt to dynamic and complex V2X scenarios. Related work has explored different approaches to resource allocation in V2X communications. Deep Neural Networks (DNNs) have been used to reduce computational costs and improve real-time performance, but they lack flexibility and rely on fixed structures. On the other hand, Deep Reinforcement Learning (DRL) has shown adaptability and high success rates in V2V communication by treating vehicles as independent agents. However, DRL can face challenges like resource conflicts as the number of vehicles grows. This research focuses on developing a dynamic resource allocation method for V2X communications using Graph Neural Networks (GNNs) and reinforcement learning to optimize performance and reduce interference in complex vehicular networks. The goal is to optimize channel and power allocation to ensure low-latency, high-reliability V2V communication, while maximizing V2I throughput.
自動運転と手動運転の混在環境における時空間グリッド予約による道路合流調停手法(松村 学)
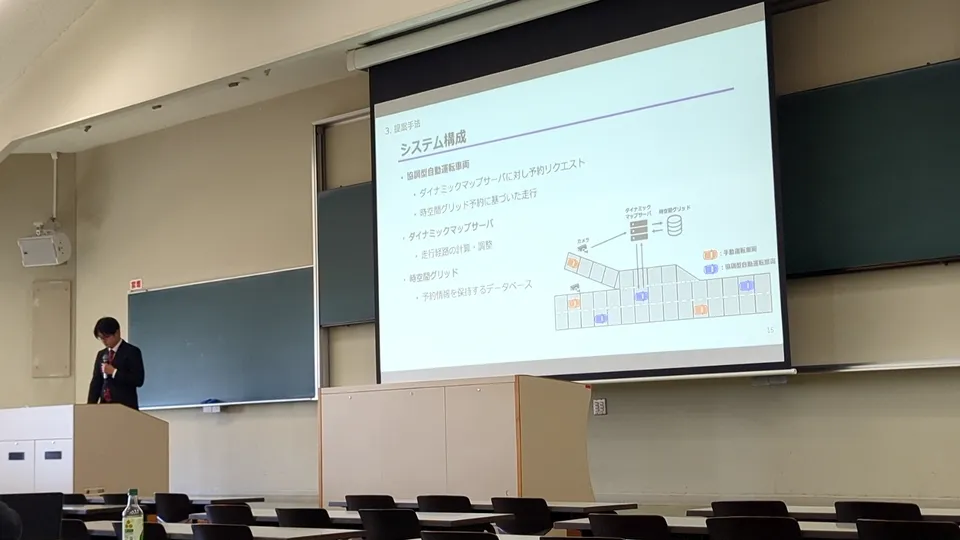
近年、協調型自動運転車両に関する研究が進められている.協調型自動運転では,V2V(Vehicle-to-Vehicle)通信やV2I(Vehicle-to-Infrastructure)通信を用いて,自車両の情報を基に走行経路を事前に決定することで自動運転車同士が協調的に走行することが可能となる.協調型自動運転の走行調停手法として,ダイナミックマップによる時空間グリッド予約の利用が検討されている.時空間グリッド予約の概要を図1に示す.時間と道路空間を区切って作成したセルの集合体を時空間グリッドとして定義し,車両は走行したい時空間グリッドを事前に予約することで車両走行の調停をとる.しかし,時空間グリッド予約による走行調停手法は,全ての車両が自動運転車両であることを前提としている.自動運転車両の完全な普及は長期にわたることが想定されているため,通信機能を持たない従来の手動運転車両を考慮した自動運転車両の制御手法の提案が必須である.本研究では,協調型自動運転車両と通信機能を持たない手動運転車両が混在する環境において,時空間グリッド予約による道路合流調停手法を提案する.手動運転車両の走行経路を予測した時空間グリッド予約を行うことで,手動運転車両との混在環境を考慮した協調型自動運転車両の時空間グリッド予約を実現する.協調型自動運転車両を制御することで効率的かつ安全な合流調停を目指す.
協調型自動運転のための路側センサによる占有格子地図を用いたオブジェクト移動予測手法(松下 翔太)
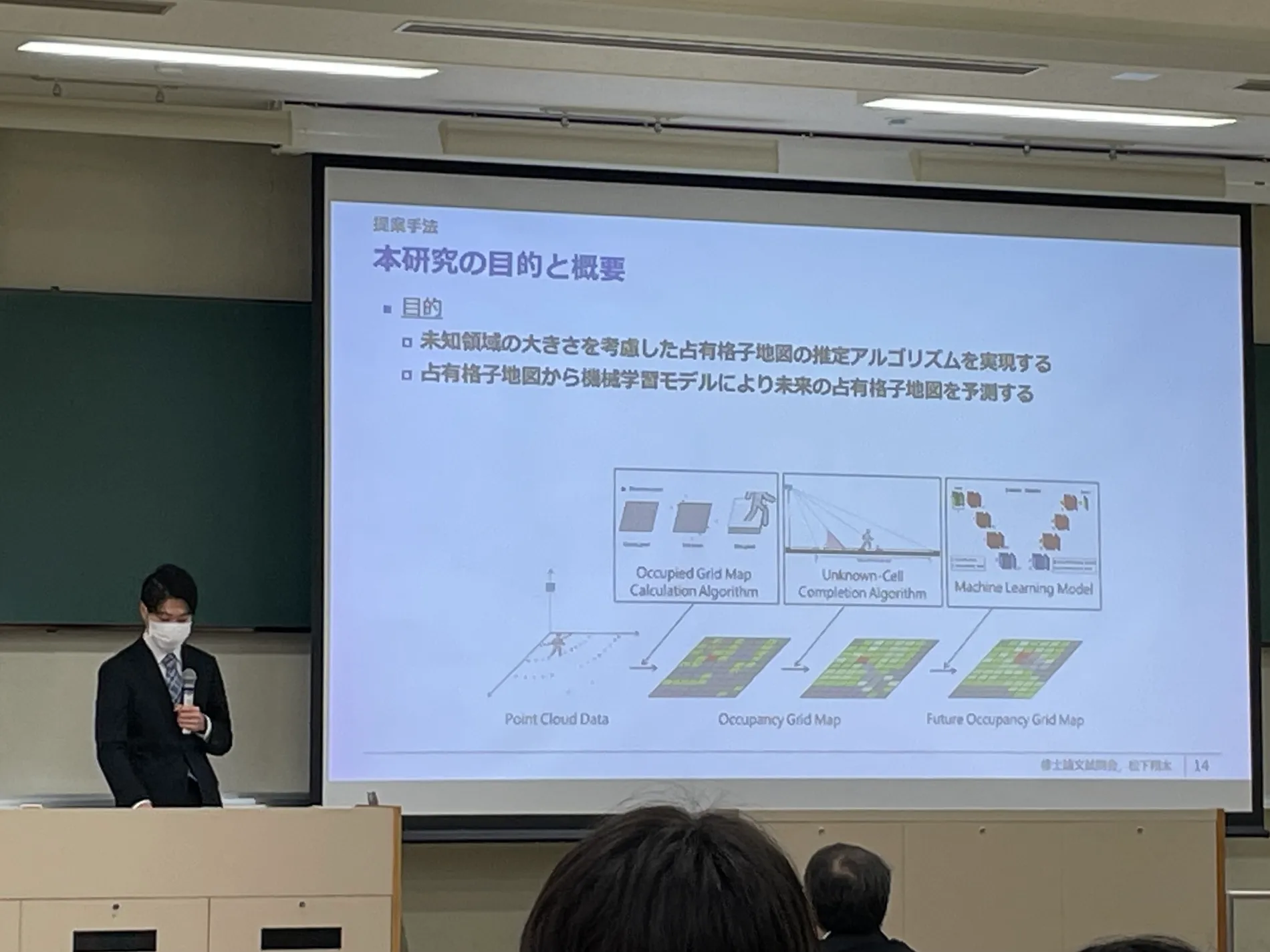
近年,自車両の車載センサに加え,通信技術を介して取得した他車両の車載センサや路側センサの情報を活用する協調型自動運転の研究が行われている.センサとしてレーザー光で対象物までの距離を計測するLiDARセンサ(Light Detection And Ranging)が広く使用されており,センサ情報の共有にはセンサ間で共通の格子状の地図である占有格子地図を用いる手法が検討されている.しかし,路側センサは車載センサと比較して高所に設置されるため,センサが検知できない未知領域が増加し,道路環境を正しく占有格子地図に反映できない問題がある.加えて,車載センサの既存の推定アルゴリズムでは,発生する未知領域を認識できないため,歩行者や車両などのオブジェクトが存在しないと推定された領域であっても,オブジェクトが突発的に出現する危険性がある.また,占有格子地図は各セルが独立して占有確率を推定するため,セル間のオブジェクトの移動を考慮できない問題がある.そのため,オブジェクトが車道へ移動してきた場合に,車両の急減速や急停車を引き起こす危険性がある.本研究では,未知領域の大きさに基づき占有確率を決定するアルゴリズムを適用して占有格子地図を推定し,得られた占有格子地図から機械学習によりオブジェクト移動を考慮した未来の占有格子地図を予測する手法を提案する.
協調型自動運転におけるフリースペース情報共有の有効性(森田 暉之)

近年,車両が路側センサを備えた路側機や周辺の他車両との間で通信を介して情報共有を行い,効率的な走行を実現する協調型自動運転が注目を集めている.自車両の車載センサで見通せない領域の情報を取得することで,車載センサの検知範囲を超えた周辺環境の認識が可能となる.自車両の車載センサの情報だけを用いて自動運転制御を行う,自律型自動運転も協調型自動運転の一部である.協調型自動運転では,センサで検知された物標は物標情報として共有される.ここで,物標は車両や歩行者,障害物等を指し,物標情報は物標の大きさと位置座標,速度,固有の識別番号で構成される動的な情報である.物標情報により,車両は周辺環境に存在する物標との位置関係や走行可能な領域を把握できる.しかし,すべての物標に関して物標情報を取得できる保証はなく,通信エラーやセンサの設置環境の悪化により物標が存在するにもかかわらず物標情報を取得できないとき,物標は存在せず安全性は一様とみなされる.また,物標情報の出力はセンサの検知範囲で物標を検知した際に行われるため,物標が存在しないことによる無出力と,物標の検知漏れによる無出力を判別できない.つまり,物標情報のみでは,センサで検知できている領域と検知できていない領域を区別できない.本研究では,道路上及びその周辺を対象に物標が存在しない領域をフリースペースと定義し,センサに基づいてフリースペースと判定された領域をフリースペース情報として,物標情報と併せて共有することを検討する.物標情報で安全を確保できない状況を想定してシミュレーション実験を行い,フリースペース情報共有の有効性を示す.
製造者通信ポリシーを用いたネットワーク仮想化技術によるIoTセキュリティシステム(坂本 拓馬)
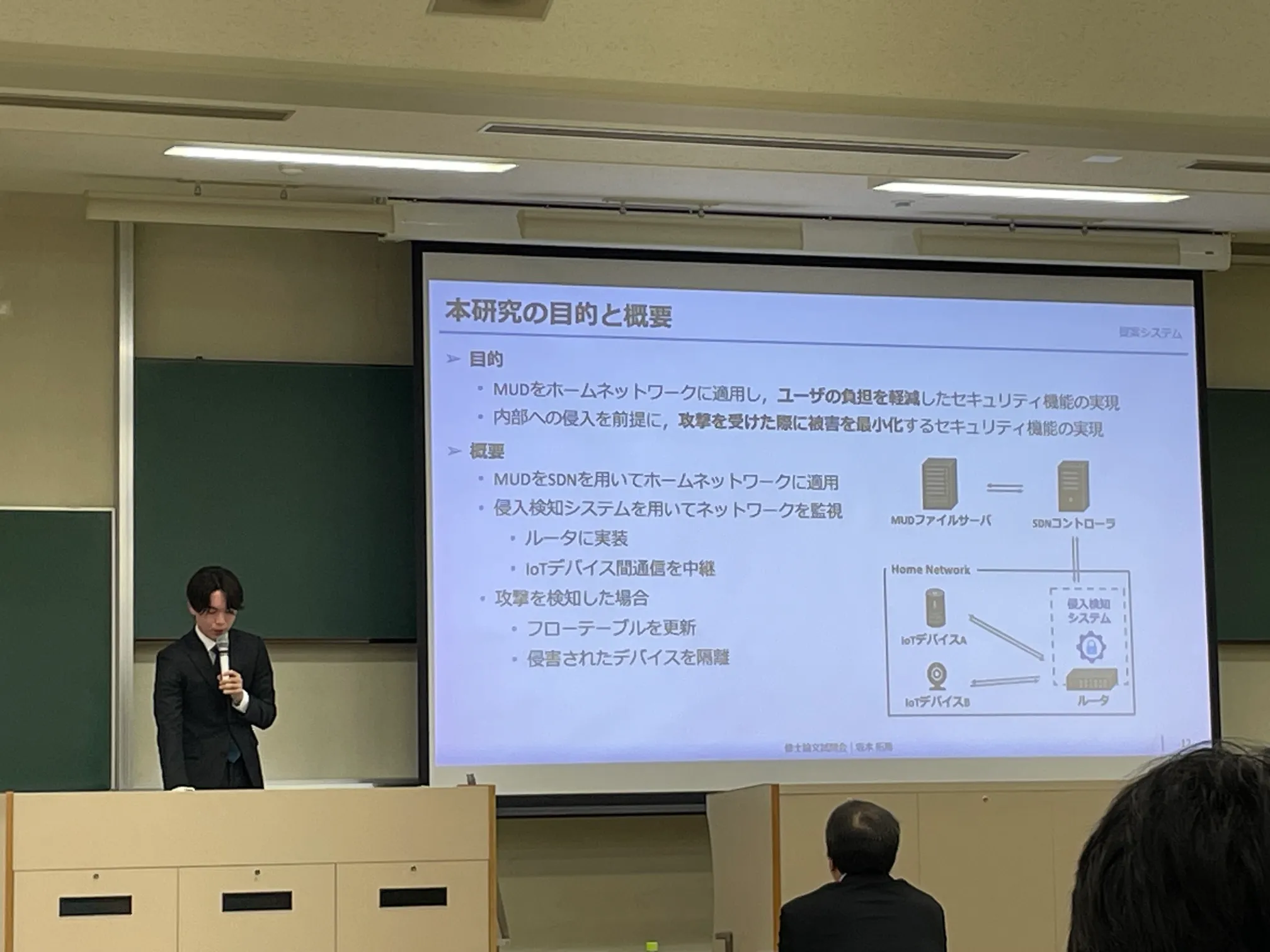
近年,Internet of Things(IoT)の発展により,多様なモノがインターネットに接続され利便性が高まる一方で,セキュリティ上のリスクも高まっている.IoTデバイスは,最低限の性能を発揮するCPUやメモリしか保持していないことが多く,セキュリティ対策をIoTデバイスに直接適用することは困難である.また,ホームネットワークのユーザは一般的にセキュリティ知識を持っておらず,ユーザ自身でセキュリティの設定を行うことは困難である.そこで,IoTデバイスの製造元が通信要件を定義し,通信制御を行うManufacturing Usage Discription(MUD)が提案されている.実際に,Software Defined Netoworking(SDN)を用いて中小規模のネットワークにMUDを適用する方式が提案されている.しかし,ローカル環境内部からの攻撃には弱いといった問題がある.そこで本研究では,MUDをネットワーク仮想化技術を活用してホームネットワークに適用する.また,侵入検知システムによって通信を監視し,攻撃を検知した場合,攻撃元デバイスをネットワークから隔離することでセキュリティリスクを最小化するシステムを提案する.
車両の走行環境を考慮した協調認識メッセージにおける冗⻑性緩和手法(山崎 慎也)
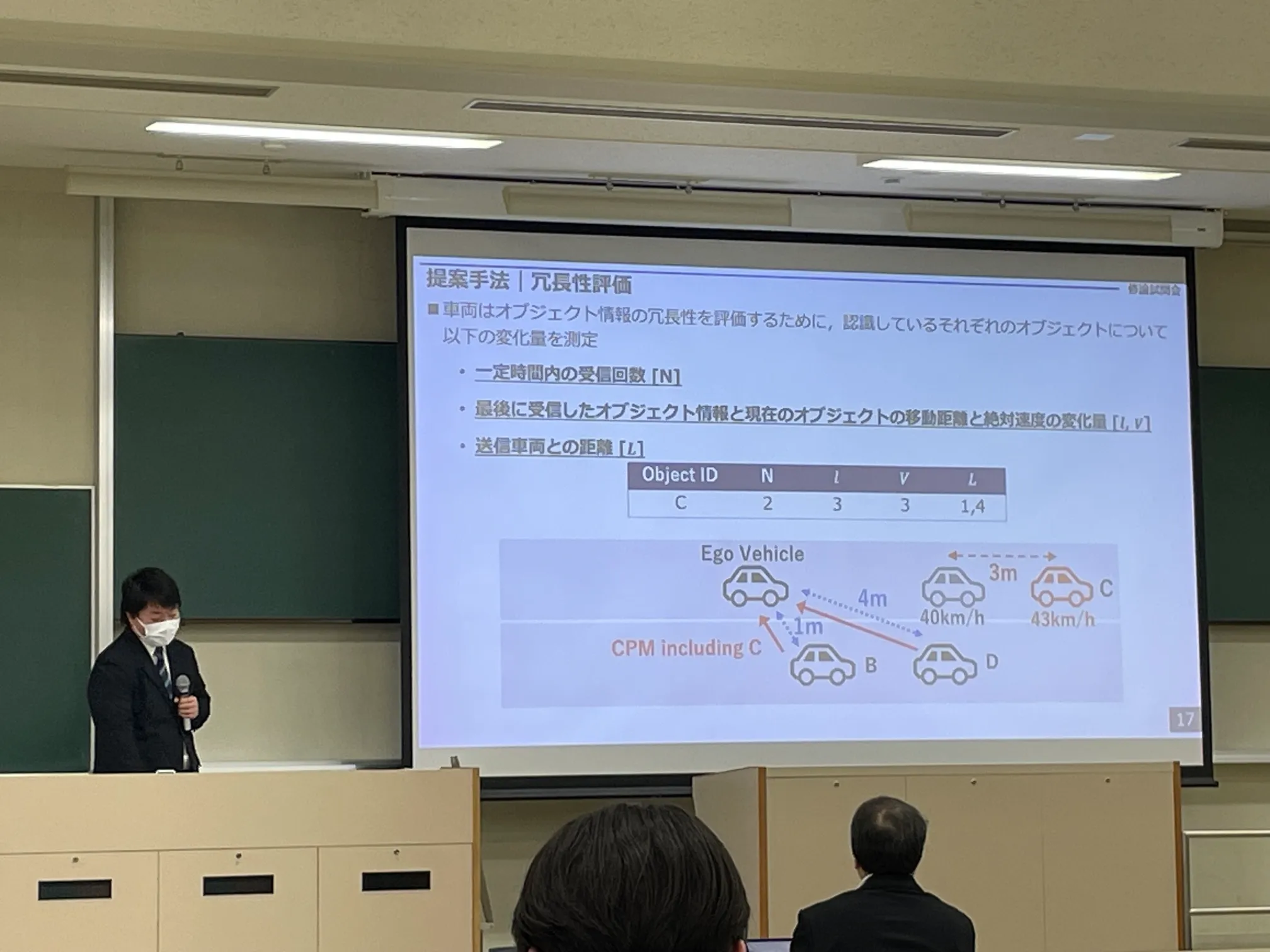
近年,車両の周辺環境の認識を向上させる技術としてCPS(Collective Perception Service)に関する研究が盛んに行われている.車両と路側機がセンサで検知したオブジェクトに関するオブジェクトの座標,速度,加速度などのオブジェクト情報をV2X(Vehicle-to-Everything)通信を用いて他車両や路側機と共有することで,車両の周辺環境の認識が向上し,交通の安全性の向上が期待されている.車両と路側機がオブジェクト情報を送信するためのメッセージであるCPM(Collective Perception Message)には,自車両の位置情報に加えてセンサで検知したオブジェクトに関するオブジェクト情報と以前に受信したCPMに含まれるオブジェクト情報が含まれる.しかし,複数の車両がCPMを定期的に送信することにより,冗長なオブジェクト情報を複数回共有し通信帯域が逼迫する可能性があり,車両の周辺環境の認識の低下に繋がる.この問題に対して,冗長なオブジェクト情報を削除することでCPMのメッセージサイズを縮小する手法であるRMR(Redundancy Mitigation Rule)という手法が複数提案されている.しかし,提案されたRMRはオブジェクト情報の冗長性の評価がそれぞれ異なるため,車両台数や歩行者数などの走行環境の変化によってCPSの性能が低下する恐れがある.また,提案されたRMRでは歩行者を考慮していないため,歩行者に関するオブジェクト情報がCPMから削除される可能性がある.通信機能がない歩行者がCPMで共有されなければ,車両は歩行者を認識することができないため,車両の歩行者に対する認識が低下し,歩行者の安全性の低下に繋がる.本研究では,提案された3つのRMRを組み合わせて冗長性が大きな車両に関するオブジェクト情報を抽出しCPMから削除することで,通信帯域の逼迫を低減し周辺環境の認識を向上させる手法を提案する.

