2024年3月13日〜15日の情報処理学会第87回全国大会において,藤原 直己(B4),徳重 柊人(B4),富成 泰生(B4),野田 虎之介(B4),森 梓恩(B4)の5名が以下のタイトルで発表を行いました.

時空間ボクセル予約による複数ドローンの飛行調停制御手法の提案(藤原 直己)
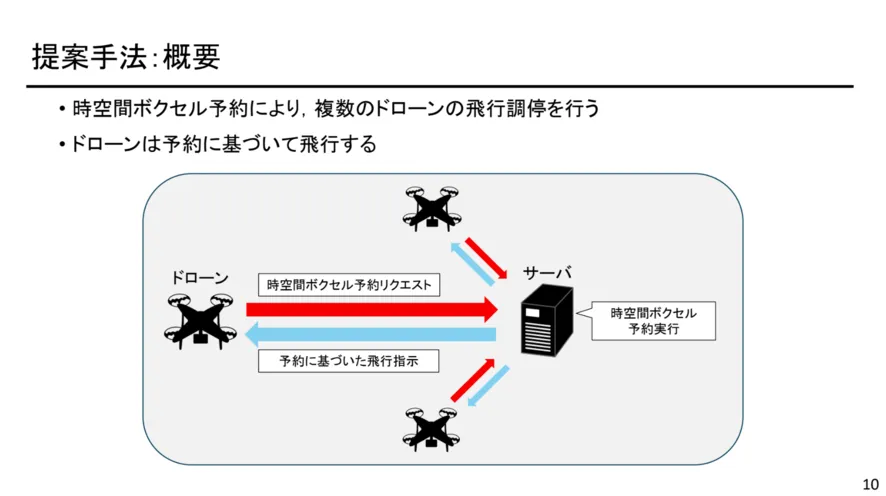
近年、ドローンは国土交通省の総合物流施策大綱において、物流における重要な新技術のひとつとして位置付けられており、都市部のような建造物等の構造物が多数存在する環境においての活用が検討されている。ドローンが複数台飛行する空間では、周辺環境の障害物だけでなく、他のドローンとの衝突を避けるために衝突回避行動をとる必要がある。ドローンの衝突回避手法として、各ドローンが障害物を検知することで衝突回避を行う手法、ドローン同士が位置情報などの情報を共有することで衝突を回避する手法がある。しかし、ドローンの台数が増加することによる空域の混雑や、構造物が多数存在する環境での飛行により、衝突回避性能が低下する課題がある。また、衝突回避行動をとる際、従来の手法では迂回を行い元の経路に復帰するという動作をとることで、経路が遠回りとなる。そのため、衝突回避行動をとる必要がない状況と比べ旅行時間が大幅に増加することで、飛行効率が低下する課題がある。そこで本研究では、構造物が多数存在する環境において、ドローンの台数が増加しても衝突回避性能を維持することを目的とし、時空間ボクセル予約による複数ドローンの飛行調停制御手法を提案する。
AR環境におけるタッチタイピング可能な仮想入力インターフェースの検討(徳重 柊人)
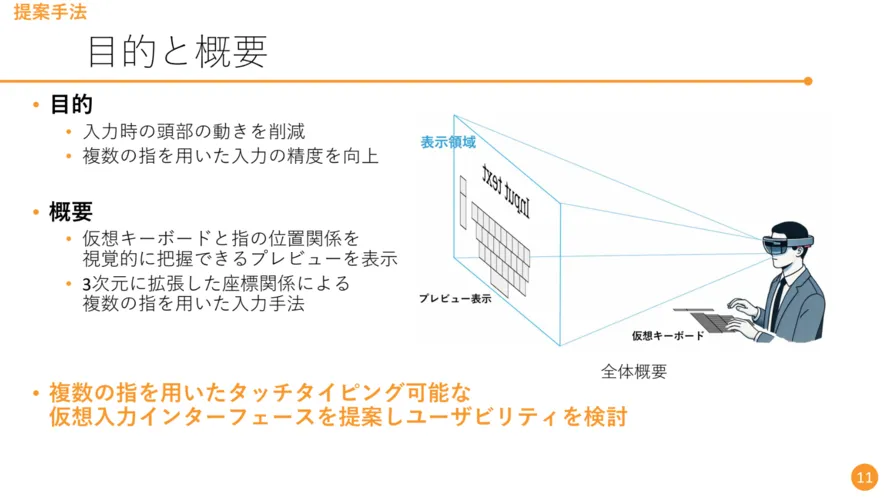
近年、AR(Augmented Reality)に関する研究が行われており、特にMicrosoft HoloLensやApple Vision ProなどのHMD(Head Mount Display)を用いたARHMDは、汎用的な対話型情報端末として使用が検討されている。ARHMDにおける入力手法は、手を用いて仮想的なオブジェクトに直接触れて操作する形式である。しかし、課題点として、現在の入力手法では複数の指で入力できない点や、視界に手が入ることにより視認性が低下する点がある。また、キーを直接操作する必要があるため、視線や頭部、腕の動きが求められ、物理デバイスと比較して入力速度やユーザビリティが低下する課題も挙げられる。本研究では、AR環境での入力をより効率的でユーザビリティを高めるため、頭部や視線の移動を抑えることができるタッチタイピング入力が可能な仮想入力インターフェースを提案し、被験者実験を通して有用性を検討する。
路側センサと歩行者端末の統合利用による軌跡情報を活用した歩行者特定の精度向上(富成 泰生)
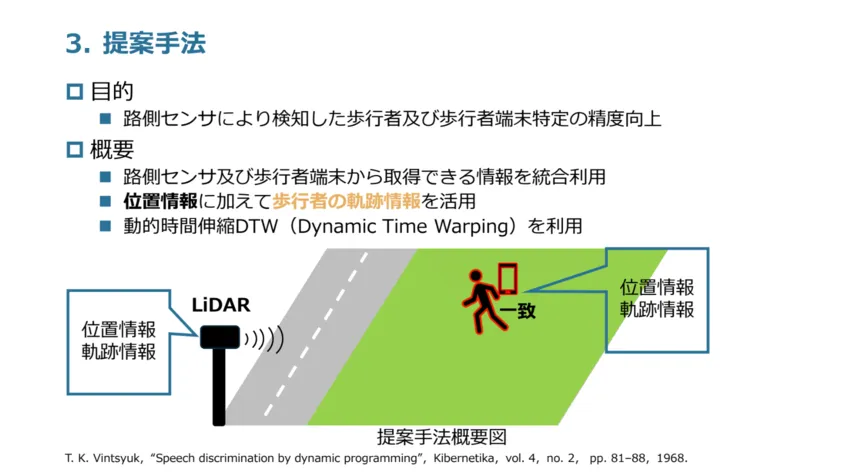
近年、交通事故の発生件数や死傷者数は年々減少傾向である。しかしながら、依然として歩行中の交通事故における重傷者数は6,800件に達しており、衝突事故防止技術のさらなる高度化が求められている。こうした課題を受け、路側センサやカメラを用いた歩行者特定の研究は進んでいるが、歩行者への直接的な警告は難しい。車両だけでなく、歩行者にも警告を提供することにより、交通事故の軽減が期待できる。歩行者の情報を検知する手段としては、路側センサであるLiDARと歩行者端末であるスマートフォンに搭載されたGPSセンサが挙げられる。LiDARは、検出範囲内で高精度に各時間の歩行者の位置情報を取得できる。一方、GPSセンサには5~10mの誤差があるものの、歩行者の属性及び各時間の位置情報を取得できる。LiDARから取得できる各時間の歩行者の高精度な位置情報と、GPSセンサから取得できる各時間の歩行者の位置情報を組み合わせる。それにより、路側センサが検知した歩行者及びその歩行者の所持する歩行者端末を一致させ特定することが可能となり、歩行者への警告が実現できる。そこで本研究では、路側センサと歩行者端末を統合利用し、位置情報に加えて歩行者移動情報として軌跡情報を活用することで、歩行者特定の精度向上を目指す。
ダイナミックマップシステムのための車両走行環境に基づくエッジサーバ動的負荷分散手法(野田 虎之介)
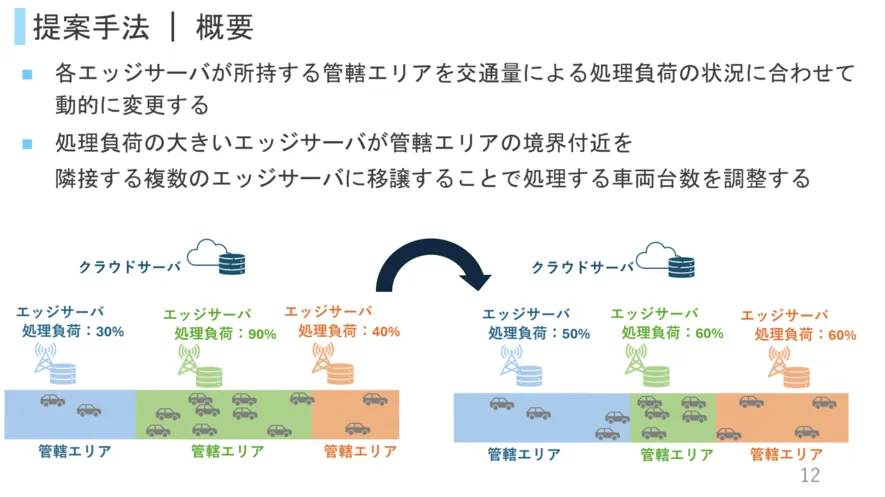
近年、センサ情報を活用して周辺環境を車両間で通信・共有し、効率的な自動走行を実現する協調型自動運転の研究が進められている。しかし、通信で共有したデータを車両ごとに個別管理しているため、データの効率的な活用が課題となっている。この課題に対して、車両や路側センサから取得した動的情報を高精度道路地図に重畳することが可能な情報通信プラットフォーム「ダイナミックマップシステム」は、自動運転をはじめとする高度な交通サービスを支える必要不可欠な情報基盤である。従来のクラウドコンピューティングを基盤とする中央集約型ダイナミックマップシステムでは、大量のアクセスに伴う処理負荷や通信遅延が問題視されてきた。一方、エッジサーバを地理的に分散配置し、各サーバがデータを管理する分散型ダイナミックマップシステムの研究が進められており、処理負荷の分散や通信遅延の低減が期待されている。しかしながら、従来のエッジサーバを用いた分散型ダイナミックマップシステムには、エッジサーバの計算資源が限られていることや、車両が位置する場所の地理情報が必要不可欠であるため、負荷分散が困難なシステム構造という課題が存在する。その結果、特定のエッジサーバにアクセスが集中した場合、計算資源が不足し、交通安全に関わるサービスの提供に支障をきたす可能性がある。本研究では、特定のエッジサーバへのアクセスが増加して性能が維持できなくなる問題を解決するため、車両が集中して計算資源が逼迫しているエッジサーバの管轄エリアの一部を隣接するエッジサーバに移譲することで負荷分散を実現する手法を提案する。
車両位置情報を利用した車車間通信隠れ端末問題軽減のための無線リソース割り当て手法の検討(森 梓恩)
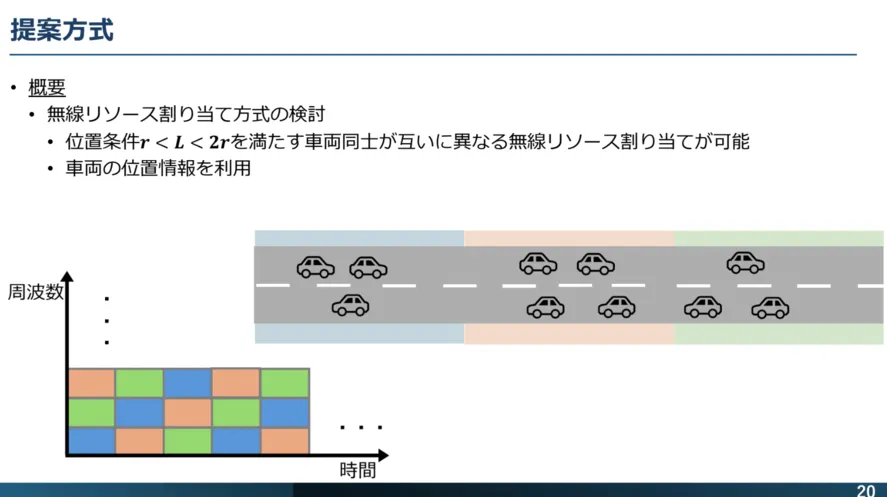
高信頼・低遅延な車車間通信の実現のために、セルラ通信を活用したCellular V2X(C-V2X)が注目されている。C-V2Xにおける車車間通信では、パケットを送信する時間と周波数を表す無線リソースに対して、無線リソースの使用状況や無線リソース予約情報を基に、無線リソースを自律的に選択するSPS(Semi-Persistent Scheduling)方式が導入されている。しかし、SPS方式では隠れ端末問題が考慮されていない。隠れ端末問題とは、互いに通信範囲外に位置する隠れ端末車両同士が同じ無線リソースを選択している場合、隠れ端末車両同士の通信範囲が重なる重畳領域に位置するさらし端末車両において、パケット衝突が発生し、パケットが受信できないという問題である。そこで、隠れ端末問題が発生する恐れがある隠れ端末車両同士が、異なる無線リソースを選択するように、車両位置情報と無線リソースを対応付ける無線リソース割り当て方式を検討する。

