2024年10月12日の第161回月例発表会において,梅田 寛斗(M1),岩井 駿人(M1),松本 翔汰(M1),髙田 陽輝(M1),田牧 浩月(M1)の5名が以下のタイトルで発表を行いました.
時空間ボクセル予約の階層管理による複数ドローンの経路計画手法(梅田 寛斗)
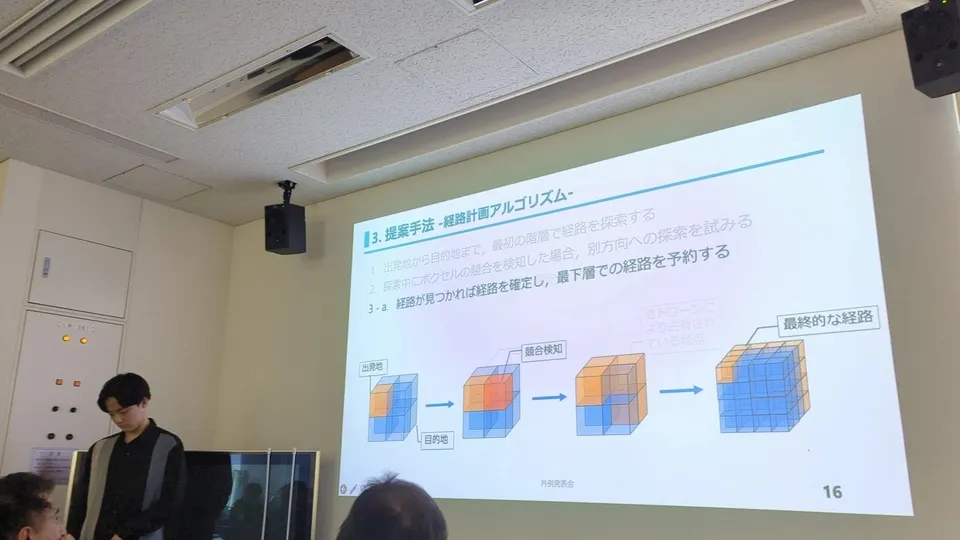
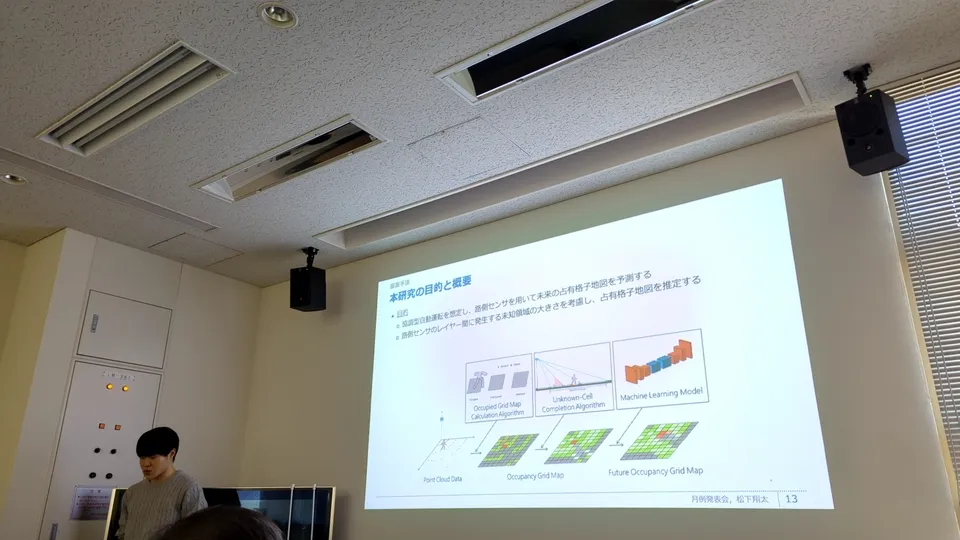
近年、ドローンはホビー用から産業分野まで多岐にわたる領域で活用されている。特に、宅配ドローンや3次元測量、インフラ点検などの分野でドローンを活用した取り組みが活発になっている。しかし、ドローンはバッテリー容量が少ないため、飛行時間や飛行距離が制約されている。そのため、バッテリーの消耗を最小限に抑えながら目的地に到達するために、効率的な経路を計画する必要がある。さらに、ドローンが複数飛行する環境では飛行経路の交差による衝突の問題が発生する。全てのドローンの経路を計算して衝突を回避しようとする場合、ドローンの台数が増加するにつれ計算量が膨大になるという問題点がある。そこで本研究では、複数ドローンの経路計画時の計算時間を短縮することを目的とし、時空間ボクセル予約の階層管理による効率的な経路計画手法を提案する。
BYTEに基づく多段階分類による物体追跡手法の提案(岩井 駿人)
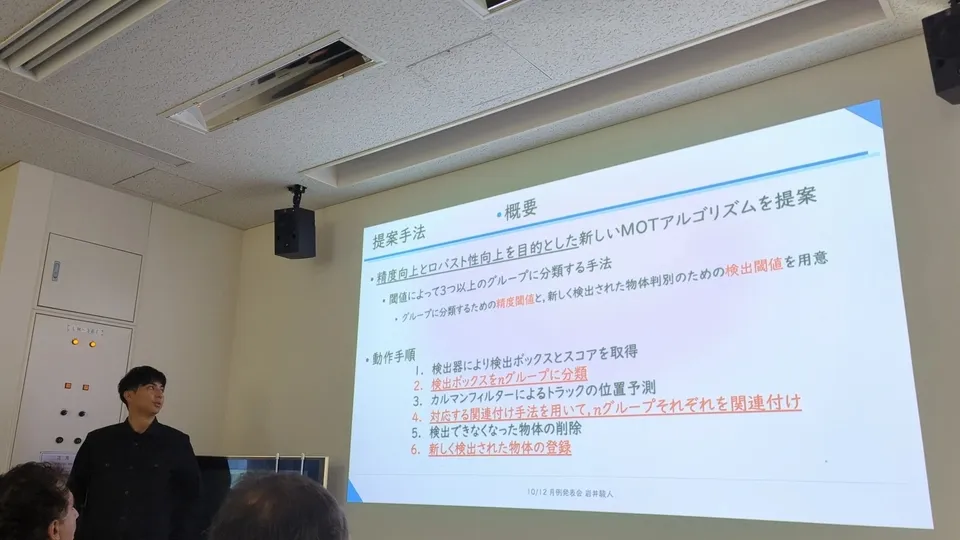
近年、物体追跡(Multiple Object Tracking、以降MOT)の研究分野が多くの注目を集めている。これは、自動運転技術や監視システム、ロボティクスなど、様々な分野での応用が期待されているためである。特に、自動運転車の普及に伴い、限られたリソースの中で正確かつリアルタイムで動作するMOT技術の必要性が高まってきている。このような背景から、MOTアルゴリズムの最適化が重要な課題となっている。MOTの実現には、大別して2種類のアルゴリズムが存在する。1つ目がTracking-by-Detectionと呼ばれるもので、検出と追跡のフェーズを分けて考える手法である。検出フェーズでは、検出器によって人物や物体を指す検出ボックスを探す。追跡フェーズでは、これまでの追跡結果であるトラックレットと検出ボックスを関連付ける。つまり、検出器と関連付け手法がTracking-by-Detectionの要になり、もう片方の手法に比べ精度が高くなりやすい特徴がある。2つ目がEnd-to-Endと呼ばれるもので、物体検出と追跡をまとめて考える手法である。こちらは処理速度が速くなりやすい特徴がある。MOTの性能評価には、MOT20やMOT17というデータセットが、アルゴリズムのベンチマークとして広く用いられている。これらのデータセットを基に、数多くのアルゴリズムが提案・実装されてきた。本研究では、現段階でMOT20やMOT17などにおいて、世界最高レベルの性能を記録しているBYTEと呼ばれるアルゴリズムに着目する。BYTEを改良したアルゴリズムは多く存在するが、本研究では追跡精度と閾値に対するロバスト性に焦点を当てたMOTアルゴリズムを提案する。
ダイナミックマップを用いた通信相手特定によるNR-V2X 通信の有効性検討(松本 翔汰)
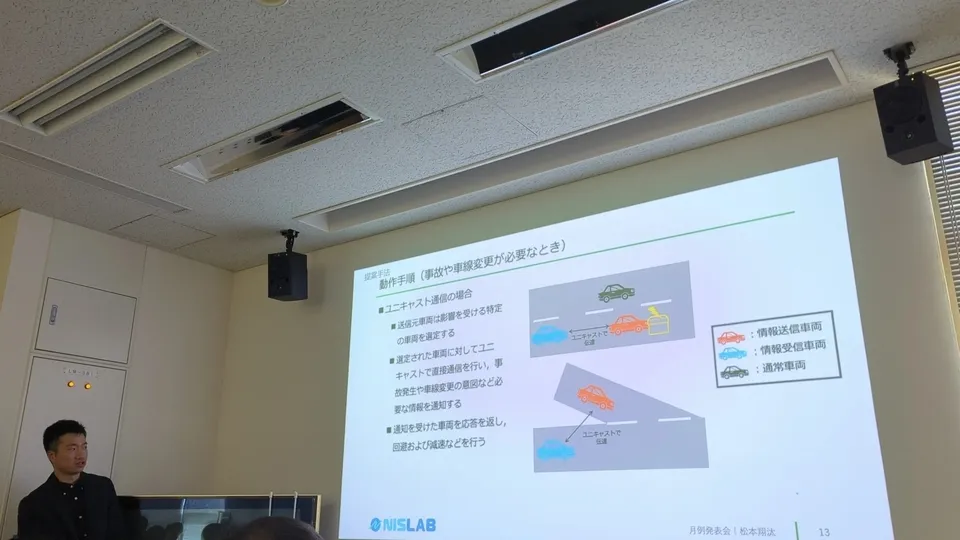
近年、自動運転技術の研究と普及が急速に進んでいる。自動ブレーキやレーンキープアシストなどの運転支援技術の開発により、ドライバーの負担が軽減され、交通事故の件数も減少傾向である。加えて、さらなる安全性を目指すことを目的に協調型自動運転の研究も盛んに行われている。協調型自動運転では、自車両のセンサ情報だけでなく、他の車両や道路インフラ、さらには歩行者などとの通信を用いて道路環境に関する情報を取得し、運転に活用することが可能である。この技術は、自律型自動運転に比べて、動的な情報量が多く、より柔軟かつ安全な運転が可能となる。協調型自動運転の通信には、V2V(車両間通信)、V2I(車両とインフラ間通信)、V2P(車両と歩行者間通信)、V2N(車両とネットワーク間通信)などがあり、これらは総称してV2X(Vehicle to Everything)通信と呼ばれる。V2X通信を行う際に携帯電話の通信規格の1つであるLTEを利用する場合、LTE-V2Xと呼ばれる。また、近年5G技術の登場により、5G通信を用いられる場合があり、これをNR-V2Xと呼ぶ。LTE-V2Xではユニキャスト通信がサポートされておらず、ブロードキャストで通信を行わなければならない。しかし、NR-V2Xはユニキャスト通信がサポートされている。本研究では、特定の状況下において、V2V通信でのユニキャスト方式を利用して各車両の位置や速度などの情報を伝達することを想定する。さらに、ユニキャスト方式、グループキャスト方式、ブロードキャスト方式の間で、送信成功率などの性能を比較し、V2X通信の効率化を目指す。
ARを利用した死角に存在する動的な物体の位置可視化手法の検討(髙田 陽輝)
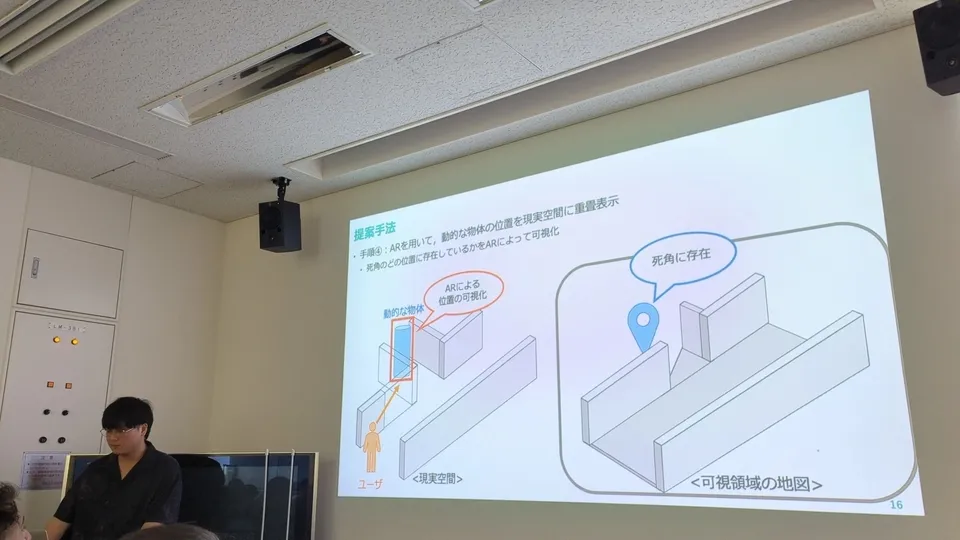
近年、拡張現実(AR: Augmented Reality)に関する技術が発展している。ARとは現実空間上にデジタル情報を重ね合わせることで現実空間を拡張する技術である。現実世界との連携が可能という特徴があるため、スポーツや教育、製造業などの幅広い分野・領域に対するARの研究や活用が盛んに行われている。ARを利用した研究として、死角に存在する動的な物体をARによって可視化する研究が行われている。安田らは、見通しの悪い交差点において、ARによる重畳表示で死角に存在する車両の情報を伝える際に有効な情報の提示手法の調査を行った。CGによって作成した状況を模擬したビデオを被験者に観察してもらうことで有用性を評価し、死角に存在する車両が見えるような壁透過表現の有効性が高いという結果を得た。しかし、実際にARを利用して死角に存在する車両を可視化するためには、技術的な課題が存在する。
ARを表示する手法として、以下の4種類の手法がある。
- マーカ型
あらかじめ画像や写真などをマーカとして登録し、マーカを認識することでAR表示を行う手法。 - 平面認識型
現実世界の高低差や大きさ、奥行きなどを認識することでAR表示を行う手法。 - 立体認識型
特定の三次元の立体物を認識することでAR表示を行う手法。 - ロケーションベース型
あらかじめAR表示を行いたい場所と表示させる内容を設定することでAR表示を行う手法。
これらの手法のうち、マーカ型と平面認識型、立体認識型は、マーカや表示させたい場所が直接見えている必要があるため、死角に存在する物体の表示に対して有効ではない。また、車両の存在は動的であることを踏まえると、あらかじめ表示させる場所と表示させる内容を設定する必要があるロケーションベース型は、死角に存在する動的な物体の表示に対して有効ではない。
以上より、上記の4種類の手法では、動的な物体が死角に存在する場合、死角のどの場所にその物体が存在しているかをAR表示することができないという課題がある。そこで、本研究では死角に存在する動的な物体の位置を、ARを用いて現実空間に重畳表示する手法の検討を行う。
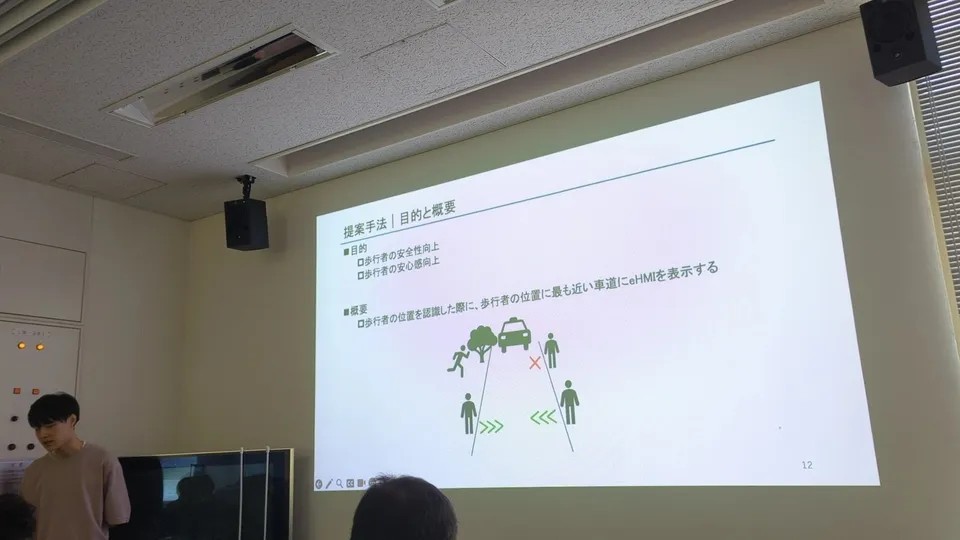
自動運転車両と複数歩行者とのコミュニケーションが可能なeHMIの検討(田牧 浩月)
近年、自動運転車両の普及が進んでいるが、自動運転車両と歩行者間の相互作用は、人間が運転する手動運転車両と歩行者間の相互作用とは大きく異なる。手動運転車両の場合、横断歩道や無信号交差点などの道路空間では、歩行者は車速情報や運転者とのジェスチャーやアイコンタクトなどのコミュニケーションを通じて、スムーズな意思決定をすることができる。しかし、自動運転車両の場合は、運転者がいない場合や運転者が前を向いていない場合を考慮しなければならず、歩行者は横断して良いかどうかを判断するための情報が少ないため、スムーズな意思決定が難しい。そこで、自動運転車両と歩行者間のコミュニケーションを円滑にするために、さまざまな外部ヒューマンマシンインターフェース(eHMI)が提案されている。現状では、主に車両にeHMIを表示する手法が提案されているが(図1参照)、これには複数の歩行者に対応できないという課題がある。例えば、2人の歩行者が同時に横断したい状況を想定すると、車両に表示されている「通行可能」の標識を見ただけでは、どちらの歩行者を対象にしているのか、または両者に向けて表示されているのかが不明である。そこで本研究では、歩行者のそれぞれの位置に最も近い車道にeHMIを表示することで、複数の自動運転車両と複数の歩行者がいる状況における安全性と安心感の向上を目指すことを検討する。