2023年5月13日の第147回月例発表会において,東 葵(B4),田中 誠也(B4),梅田寛斗(B4),髙田陽輝(B4),松本翔汰(B4),田牧浩月(B4),辰己弘征(B4),岩井駿人(B4),徐煜程(M2)の9名が以下のタイトルで発表を行いました.
公共交通機関で複数人が利用する移動環境を考慮した MPQUIC パケットスケジューラ(東 葵)
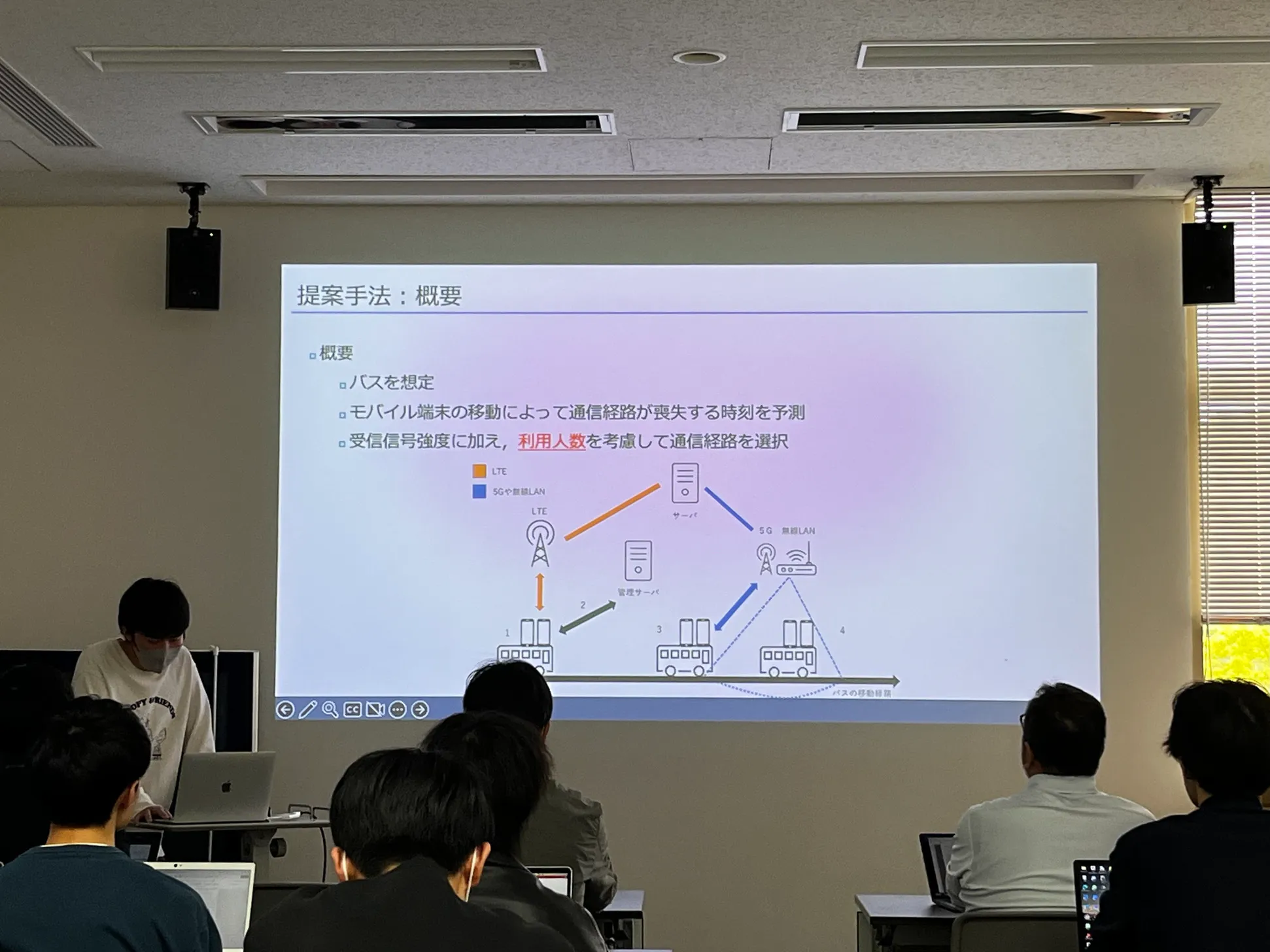
近年,スマートフォンなどのモバイル端末の普及により,公共交通機関や自家用車での移動中にビデオストリーミングやゲームなどのコンテンツを利用する機会が増えている.これらのコンテンツを快適に利用するためには,パケットロスや通信の遅延などが発生しないように,通信帯域を確保することが必要となる.そこで,LTE や 5G などのセルラー通信と無線 LAN といった複数の通信を同時に使用することが可能なマルチパストランスポートプロトコルという技術が用いられている.マルチパストランスポートプロトコルは,パケットスケジューラによってパケットがどの通信経路へ送信されるか決定される.しかし,既存のパケットスケジューラはモバイル端末の移動による通信経路の喪失を考慮していない.そのため,移動による通信経路の損失によってネットワーク上を伝送中のパケットである InFlight パケットがモバイル端末に到達できず,パケットロスが発生する.既存研究には移動環境を考慮したパケットスケジューラも存在するが,公共交通機関での複数人利用は考慮されていない.そこで本研究では,公共交通機関で複数人が同時に移動する場合を想定し,公共交通機関から取得した移動経路,受信電波強度,利用者人数に基づいて通信経路を選択することで,移動環境に応じた通信経路選択を可能とし,InFlightパケットによるパケットロスを削減する手法を提案する.
ホームネットワークにおける IoT 機器管理を目的としたコンテナオーケストレーションシステム導入の検討(田中 誠也)
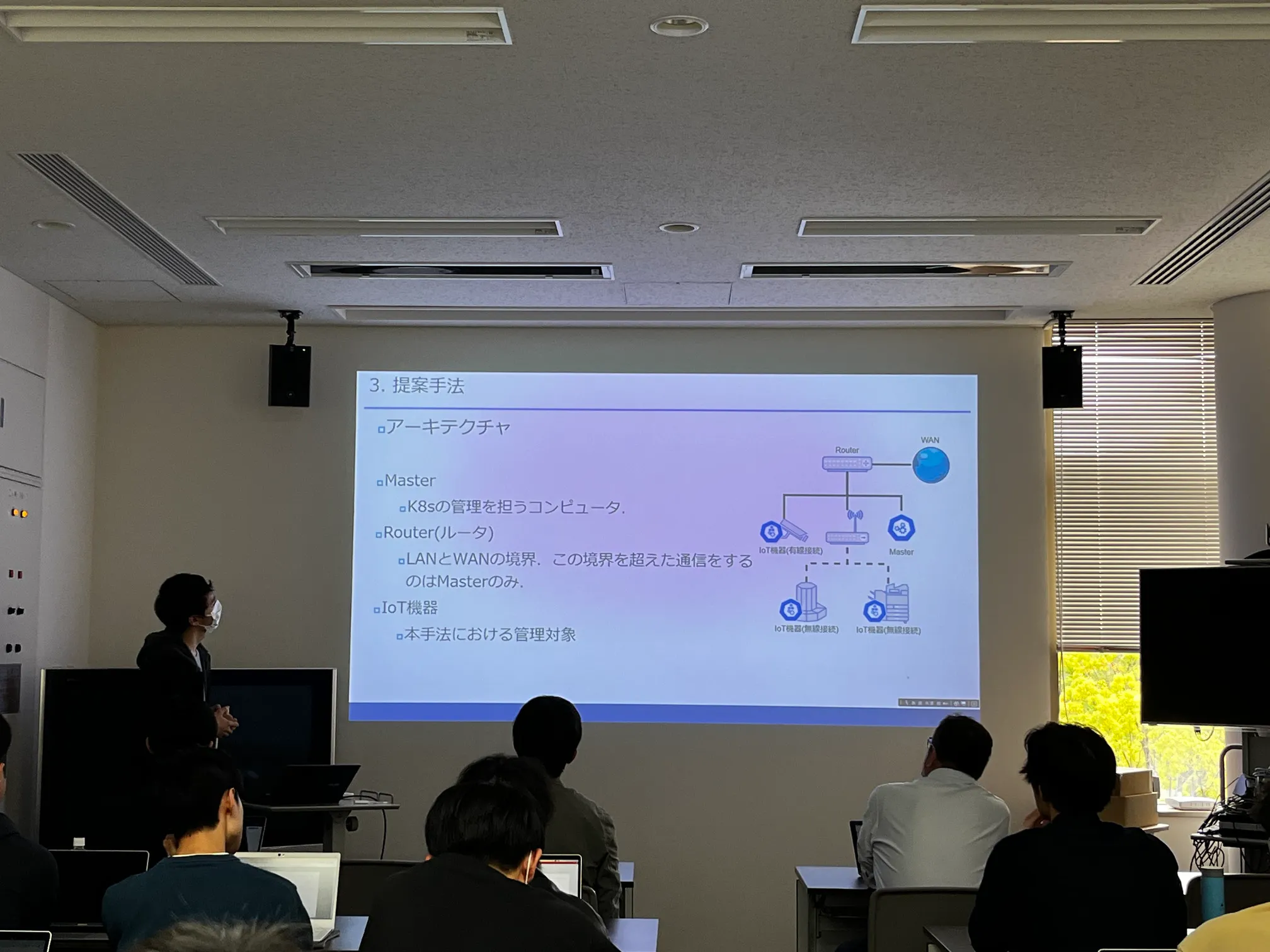
近年,IoT (Internet of Things) 機器の普及が進んでいる.特に一般家庭においても,家電のIoT 化等により,家庭内に構築したLAN 環境であるホームネットワーク内のIoT機器が増加している.それと同時に,IoT 機器のセキュリティも問題となっている.IoT 機器のセキュリティが問題になりやすい理由として,メーカにより十分な監視手段が提供されない場合が多い事,ソフトウェアのアップデートが行いにくい事により既知の脆弱性の修正が早急に行われない事が挙げられる.IoT 機器の管理やアップデートの簡易化を目的として,各社が自社製品の管理用のアプリケーションを公開しているが,それらのアプリケーションは自社製品専用であるため,機器が増えるほど対応するアプリケーションも増えて利用者による管理が難しくなる.そこで,本研究では,家庭内のIoT 機器の管理やソフトウェアアップデートが困難であるという問題点に対して,ホームネットワークにおいて仮想環境のクラスタ管理ソフトウェアであるコンテナオーケストレーションシステムを導入し,共通の管理用通信プロトコルを制定することでIoT 機器を一元管理を可能とする手法を提案する.
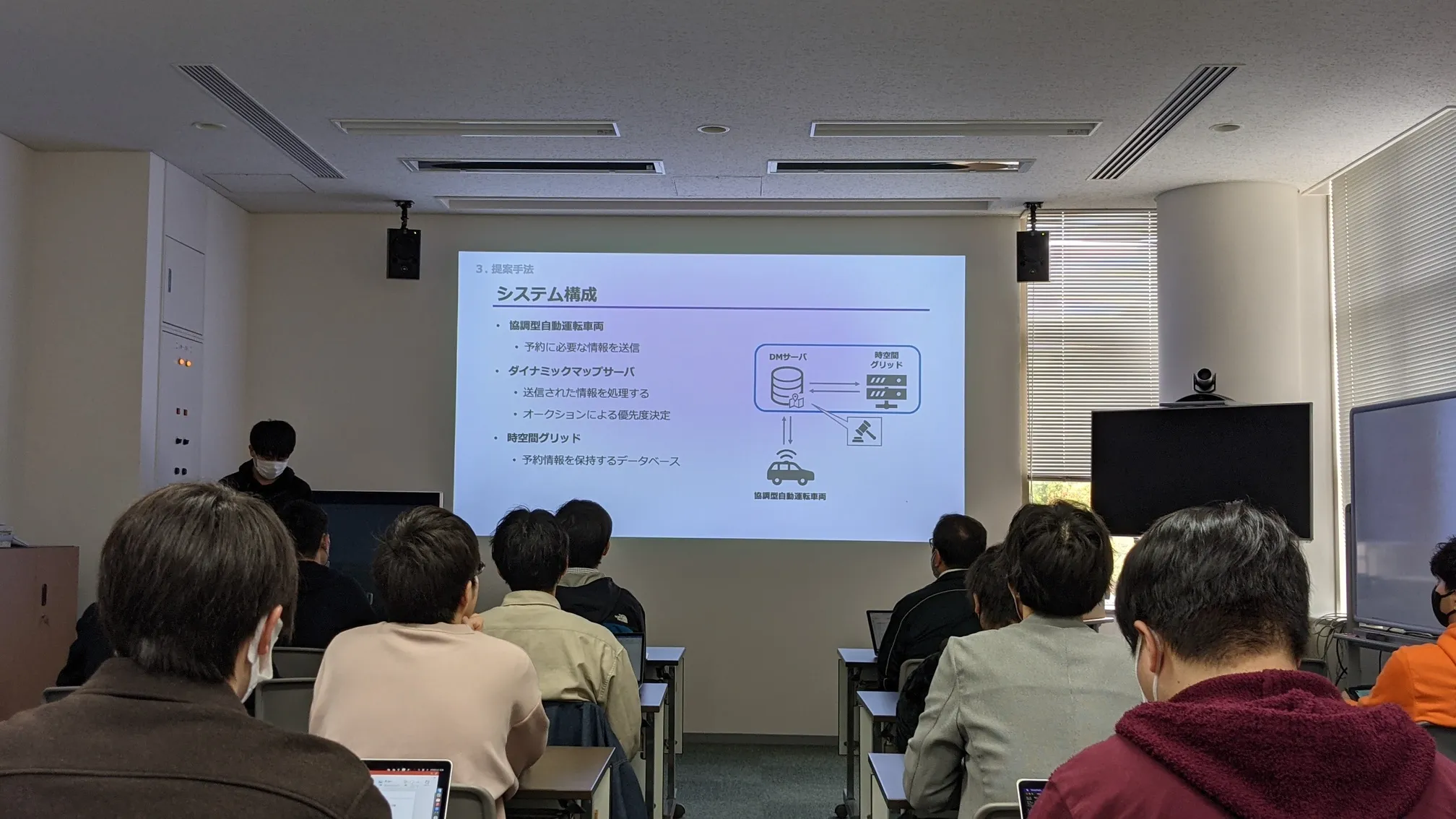
時空間グリッド予約による車線変更を考慮した道路合流調停手法(梅田寛斗)
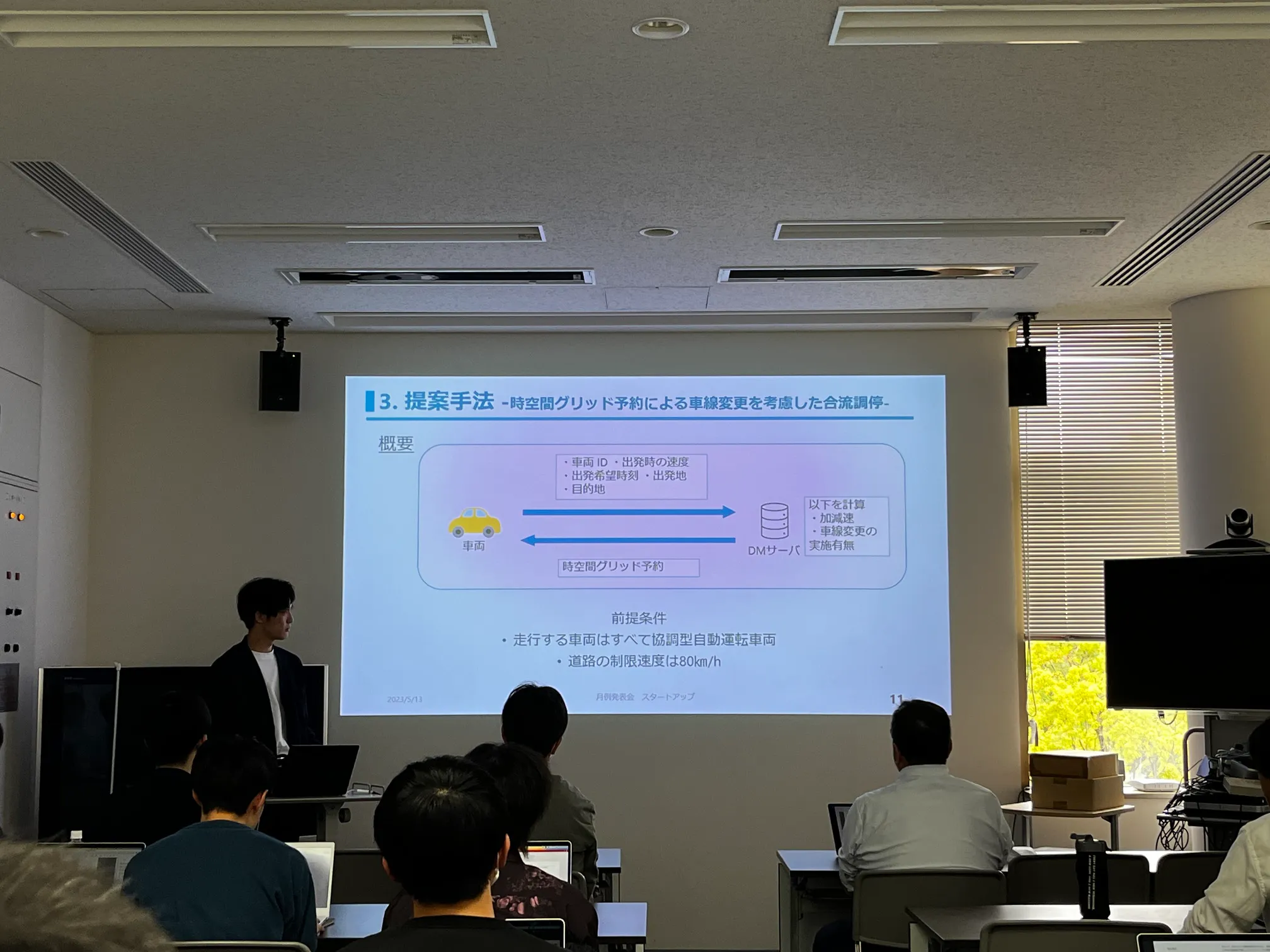
自動運転技術に関する研究において,通信を用いて車載センサ情報を他車両と共有して走行する協調型自動運転が検討されている.協調型自動運転において,車載センサ情報や路側機からの情報を静的な地図データと関連付けて共有する技術としてダイナミックマップがある.これにより,自車両から死角となるような場所の状況を車車間通信を用いずに把握することが可能となる.ダイナミックマップを利用した走行調停手法として時空間グリッド予約が提案されている.道路上の空間と時間をグリッドに分割し,各車両がどの時間にどのグリッドを走行するかをダイナミックマップ上で管理する.先行研究では,高速道路における走行調停においてこの手法を適用したことによって合流時の車両の加減速が緩やかになり,安全性や効率に寄与することを示した.しかし,この研究では高速道路の本線での車線変更について触れられておらず,広域での走行調停ができるという時空間グリッド予約のメリットを活かしきれていない.そこで本研究では,より効率的な高速道路の合流調停を目的とし,高速道路の本線における車線変更を考慮した走行調停の手法を提案する.
複数ドローンの情報共有と動的な操縦規制の生成による未知領域探査効率向上手法の提案(髙田陽輝)
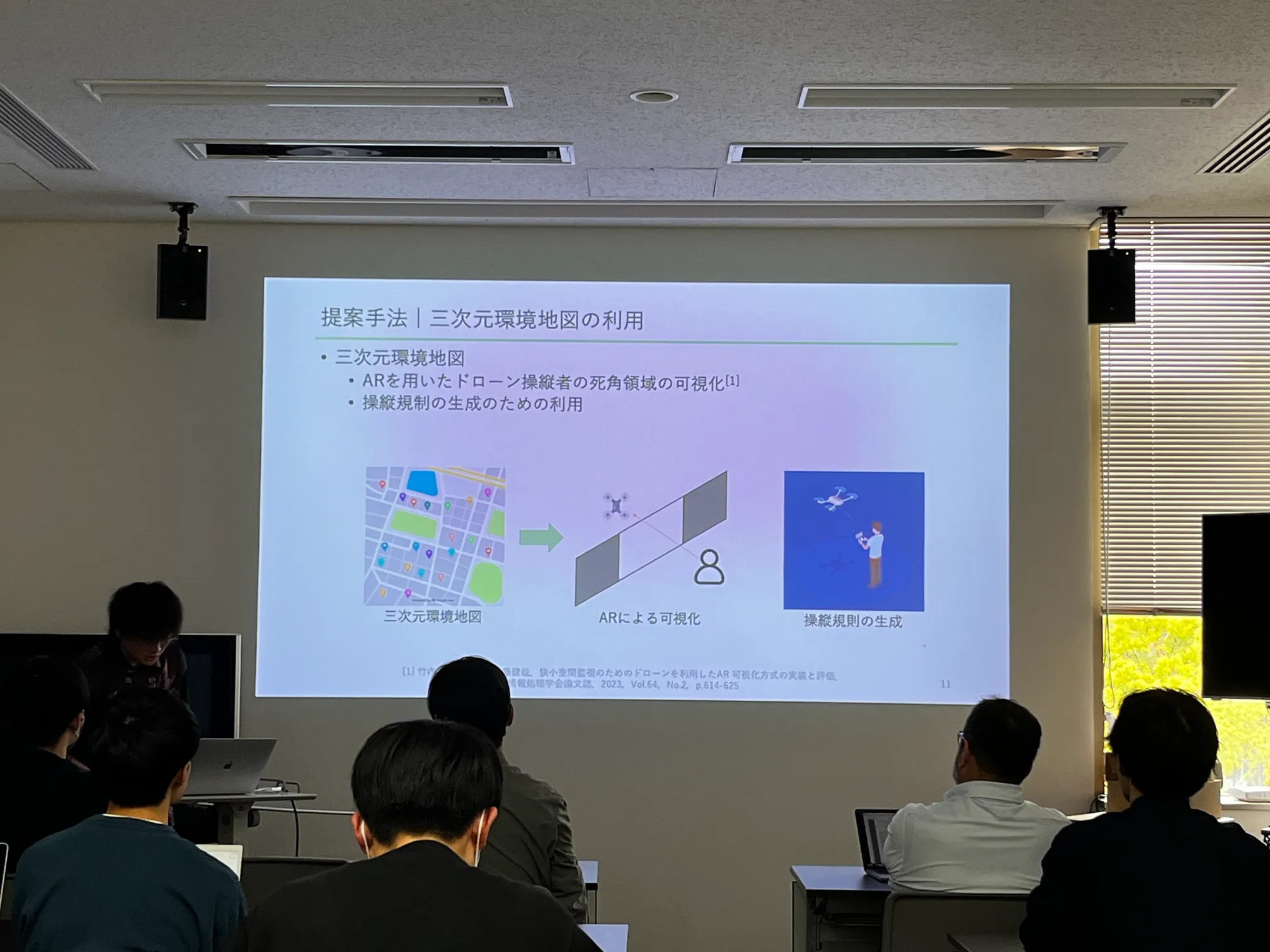
近年,ドローンは空中写真撮影やインフラ設備の点検など,さまざまな分野で運用されており,小型ドローンは機体の小ささを活かして,人間が入ることができない狭小空間の未知領域探査への応用が期待されている.そこで,狭小空間の未知領域探査へ複数ドローンを投入することが考えられている.しかし,複数ドローンによる狭小空間の未知領域探査の際には,探査効率,すなわち短い時間での領域探査の完遂が求められる.その理由として,小型ドローンのバッテリー容量の小ささによる飛行時間の制限が挙げられる.そのため,操縦者は他ドローンと情報を共有して探査領域の重複を回避したり,やむを得ず他ドローンによる探査済み領域を飛行する際には,未知領域の飛行時に比べて素早い移動をすることで未知領域の探査に時間を多く費やしたりするなど,探査効率が低下しないように他ドローンと連携しながら探査する必要がある.本研究では,狭小空間における死角領域内での複数ドローンを用いた未知領域探査における探査効率の向上を目的として,各ドローンが取得したセンサ情報を他ドローンと共有し,効率的に探査するための最適なドローンの操縦規制を提供する手法を提案する.
高速道路上の車線変更における V2I,V2V 通信を併用した車両走行調停手法(松本翔汰)

近年,自動運転技術に関する研究が盛んに行われている.我が国では,自動運転レベル3 が実用化されており,システムの介入要求等に関して,ドライバーが適切に対応することが必要である.また,自動運転車両は,通信技術を用いて情報交換を行なっており,V2X(Vehicle-to-everything)通信を利用することで,道路上の動的環境のデータを入手することが可能になる.そしてそのデータをもとに,車両制御や,ドライバーに対する安全運転支援を行う.V2X 通信には,車車間通信であるV2V(Vehicle-to-Vehicle) 通信,自動車と道路側のインフラ間の通信であるV2I(Vehicle-to-roadside-Infrastructure) 通信,自動車と歩行者間の通信であるV2P(Vehicle to Pedestrian) 通信,自動車とネットワーク間の通信であるV2N(Vehicle to Network)通信がある.それらを活用することで,安全で快適な交通社会の実現が可能になると考えられている.しかしながらより多くの通信を行うと,通信帯域の逼迫や,データの欠損が発生する可能性も高くなる.データの欠損は安全性が低下する.そこで,本研究では,高速道路走行中の車線変更をV2I(Vehicle-to-roadside-Infrastructure) 通信とV2V(Vehicle-to-Vehicle) 通信の併用及び切り替えを用いて通信量を抑えながら安全性を保つ手法を提案し,シミュレーションによってその効果を検討する.
大容量コンテンツ品質向上のための MPQUIC による移動体通信の検討(田牧浩月)
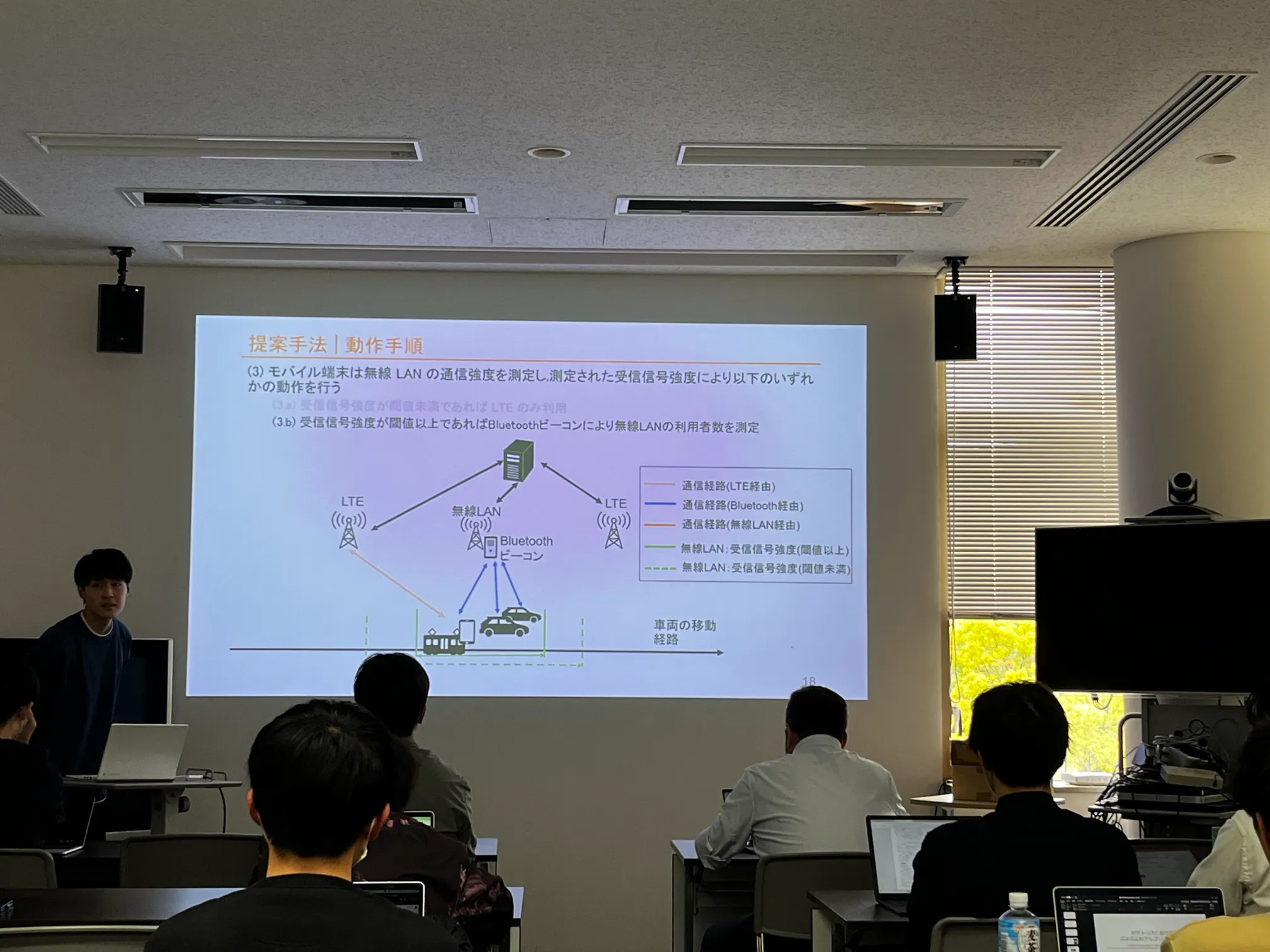
近年, スマートフォンなどのモバイル端末の普及や移動体通信技術の向上により, ビデオストリーミングやオンラインゲームといった大容量コンテンツを移動環境においても楽しむ機会が増加している. 移動体通信とは端末が移動をしながらでも途切れることなく安定した通信を行うことができる通信方法である. しかし, このような大容量サービスを遅延なく利用するには十分な通信帯域を確保する必要がある. そこで, LTE や5G といったセルラー通信や無線LAN など, 複数の通信経路を同時に利用しデータ転送を行うことで十分な通信帯域を確保する技術である, マルチパストランスポートプロトコルが注目されている. マルチパストランスポートプロトコルでは, パケットスケジューラによってパケットをどの通信経路に送信するか決定される.しかし, 現在利用されているパケットスケジューラは, 移動環境において5G や無線LAN を利用する際に, ユーザが5G や無線LAN の通信範囲外に移動することで通信が切断され, パケットロスが生じることで大容量コンテンツの品質が低下するという課題がある.そこで本研究では, 移動環境におけるモバイル端末での大容量サービス利用時に, 5G や無線LAN の受信信号強度とその利用者数の変化に応じて通信経路を選択することによって, 通信経路の損失によるパケットロスを削減する手法を提案し, 大容量コンテンツの品質向上を検討する.
複数車両の歩行者検知における BLE ビーコンを利用した歩行者の同一判定手法(辰己 弘征)
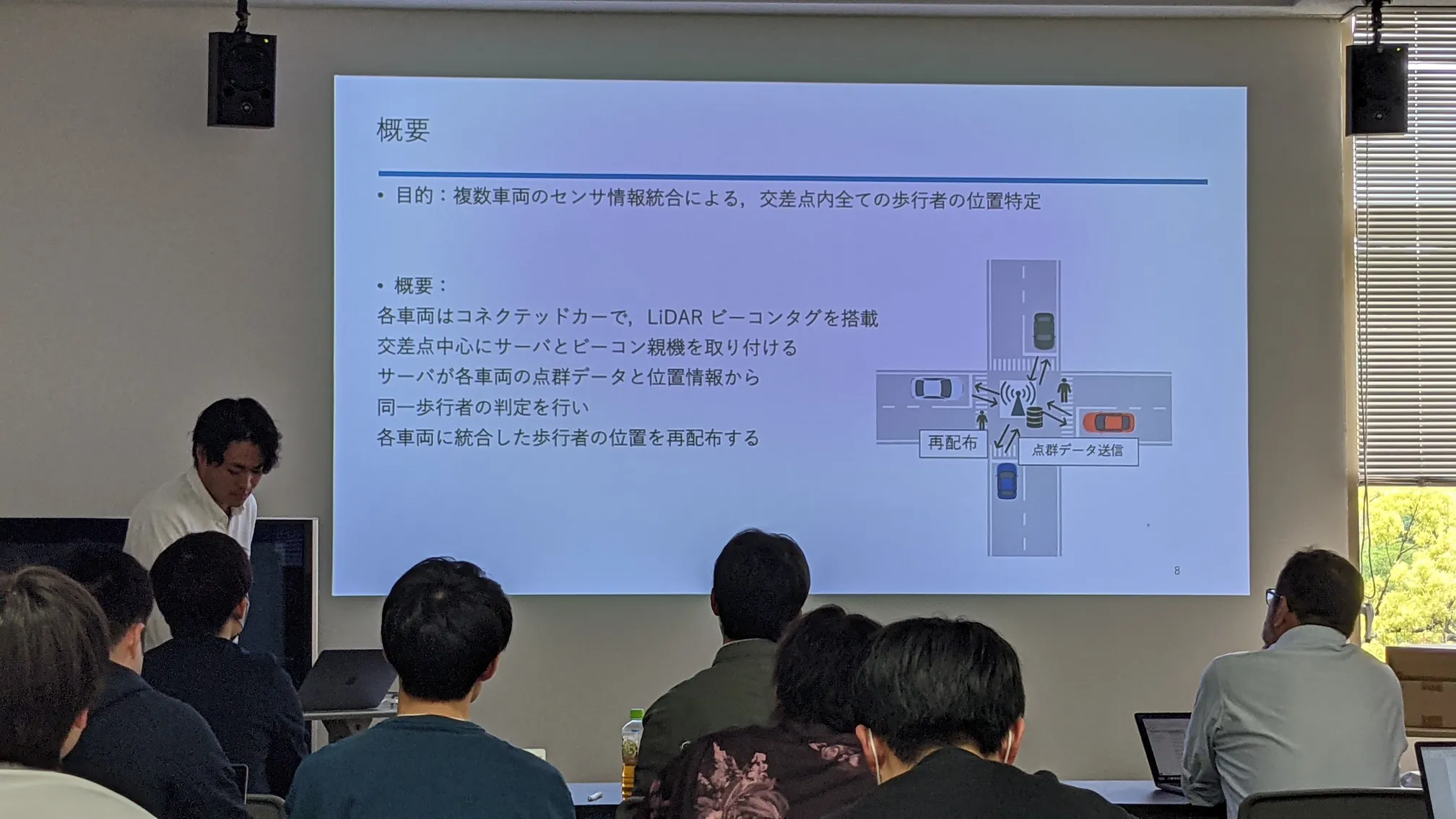
近年,LiDAR (Light Detection And Ranging) による位置測定技術が注目されている.LiDAR はレーザー光を使用して物体までの距離や位置を計測し, 物体の位置や形状を点群データとして取得するセンシング技術である.車両にLiDAR とカメラを取り付け,点群データと視覚情報を組み合わせて歩行者認識の精度を上げる研究など歩行者の位置測定の精度を向上させる研究も行われている.しかし,車両一台のセンサ情報では,死角領域が生まれるため,複数車両のセンサ情報を統合すれば,さらに歩行者検出の精度が向上すると考えられる.統合する際,車両の位置情報が正確でない場合,各センサで検知した歩行者が同一の歩行者であると判断できず,実際より多くの歩行者を認識してしまうという問題がある.そこで,本研究ではBluetooth5.1 を搭載したBLE (Bluetooth Low Energy) ビーコン(以下ビーコン)を用いて複数車両の位置情報を正確に取得し,各車両に搭載したLiDAR で検知した歩行者情報を統合することで歩行者の同一判定を行う.
対テトリスにおけるぷよぷよAI アルゴリズムの比較(岩井駿人)

近年の人工知能(AI)の進化によって,AlphaGo をはじめとするAI システムが,様々な領域で人間をはるかに上回る成果を出している.その一例として,Zetris やColdClear などのテトリスAI が挙げられる.これらのAI はテトリスのプロを圧倒的に凌駕するプレイを実現しており,ぷよぷよテトリスというゲームを起点にその実力が注目されるようになった.ぷよぷよテトリスは,ぷよぷよとテトリスの二つのパズルゲームを組み合わせたゲームで,プレイヤーはそれぞれ得意なゲームを選択して対戦することができる.ぷよぷよやテトリスに関連する研究は存在するが,ぷよぷよテトリスにおける研究は見かけられない.そこで本研究では,対テトリスに特化したぷよぷよのAI を開発することを目的とする.ぷよぷよAI のアルゴリズムには,モンテカルロ木探索や深層学習,また教師あり学習を用いてそれぞれの性能の比較を行う.テトリスとぷよぷよが対戦を行う際にはぷよぷよ側は,テトリスが送るおじゃまを受けながら自フィールドで3~6連鎖を構築し,徐々にテトリスをゲームオーバーに追い込む,といった戦法が一般的で,その観点からも従来のぷよぷよのAI とは大きく異なることがわかる.具体的には,対テトリスにおけるぷよぷよは柔軟性が求められるため,人間味のある行動の実現が重要になってくる.従来のぷよぷよ及びテトリスAI は,単純な最適化アルゴリズムに基づいて行動することが一般的であったが,本研究ではそれらを超えるアプローチを追求する.その一つのアプローチとして,モンテカルロ木探索が挙げられる.ランダムなシミュレーションを繰り返すことによって可能な手を探索して,最適な手を選択することができるようになる.
LSTNet-based QoS Prediction for V2X Applications in 5G System(徐煜程)
Vehicle-to-Everything (V2X) communication supports the efficiency and safety requirements of future Intelligent Trans- port Systems (ITS) by enabling the exchange of information. 5G Automotive Association (5GAA) has defined many V2X use cases, namely High-density Platooning and Tele- operated Driving (ToD). In V2X communication, there are some factors that affect the Quality of Service (QoS), such as radio and network re- source availability. V2X services rely on a certain level of QoS to operate properly and provide consumers with a satis- fying experience. Therefore, some critical safe-related V2X services need to prevent sudden session interruptions due to QoS degradation. The QoS can be measured by some Key Performances Indicators like minimum uplink (UL) or down- link (DL) throughput and maximum allowable delay. While enhancements for 5G systems (5GSs) have been standardized in recent releases to satisfy the majority of QoS requirements for a range of demanding applications. Never- theless, due to variable mobile network conditions, there may be situations in which 5GSs are unable to provide the required QoS, resulting in an unexpected QoS degradation for the ap- plication. The unexpected decline in QoS is undesirable for specific automotive applications such as ToD due to the re- quirement of application adaptation in response to upcoming QoS changes. Predictive QoS is described in the 5GAA, which refers to the mechanisms in place to allow mobile networks to notify their users proactively of future changes in QoS. Having ad- vanced knowledge of an anticipated QoS change allows V2X applications to adjust their behavior before being affected. This paper proposes an Long- and Short-term Timeseries network (LSTNet) -based QoS prediction model to provide accurate prediction of uplink throughput for V2X applica- tions with high uplink throughput demand in the future pe- riod.