2023年4月8日の第146回月例発表会において,松村 学(M1),東田 悠希(M1),松下 翔太(M1),坂本 拓馬(M1),山﨑 慎也(M1),佐々倉 瑛一(M1)の6名が以下のタイトルで発表を行いました.
時空間予約マイクロロードプライシングのオークション方式による価格設定手法の提案(松村 学)
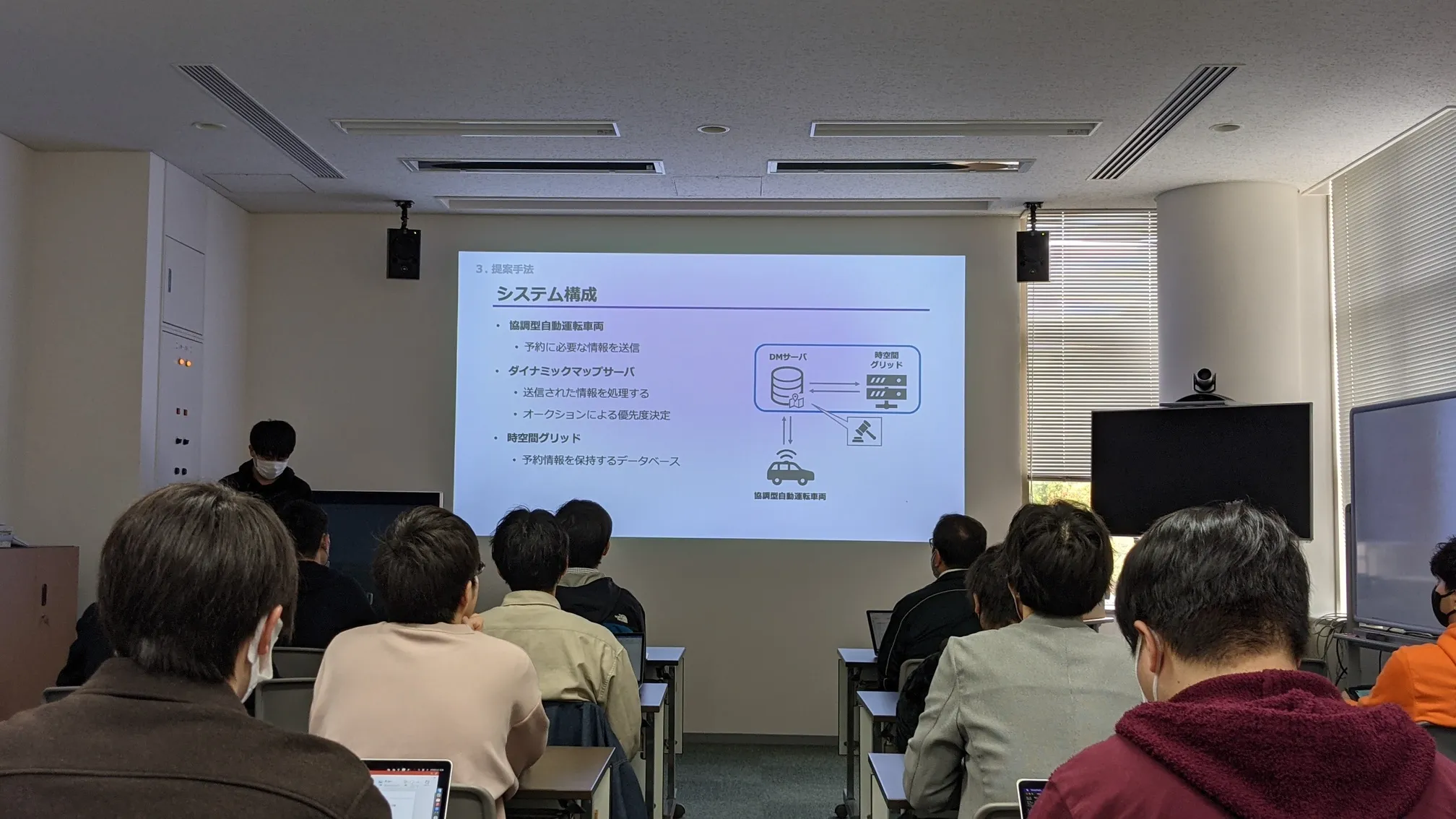
近年,工事情報や渋滞情報などの動的情報と高精度3次元位置情報(路面情報, 車線情報)等の静的情報を組み合わせたデジタル地図であるダイナミックマップの研究が進められている.この技術を用いることで,協調型自動運転車両が走行予定である経路の時間と空間を事前に予約し,他の車両を排除することで,よりスムーズな走行を可能にする時空間グリッドという考え方が確立された.今後ダイナミックマップの活用や,協調型自動運転車両の普及につれて安全運転支援や渋滞緩和などの役割を果たすと期待されている.また,ロードプライシングという考えのもと,時空間によって分割したグリッドそれぞれに値段を付け,その時空間グリッドを走行するための予約に料金を必要とするマイクロロードプライシングの実現を目指す研究も行われている.このマイクロロードプライシングでは,車両のスムーズな走行が可能となる一方で,事前予約の優先度がない場合や価格設定によっては,車両の予約が集中する問題が生じ,一部車両の旅行時間の増大が問題点となる.そこで本研究では,マイクロロードプライシングでの時空間グリッド予約において,車両が支払う料金に応じて予約の優先度を決定するオークション方式を導入する.これにより関連研究に対して出発地から目的地までの旅行時間の短縮を目的とする.
車両走行状態とドライバ視線の時系列変化を考慮した運転支援情報提示の制御手法(東田 悠希)
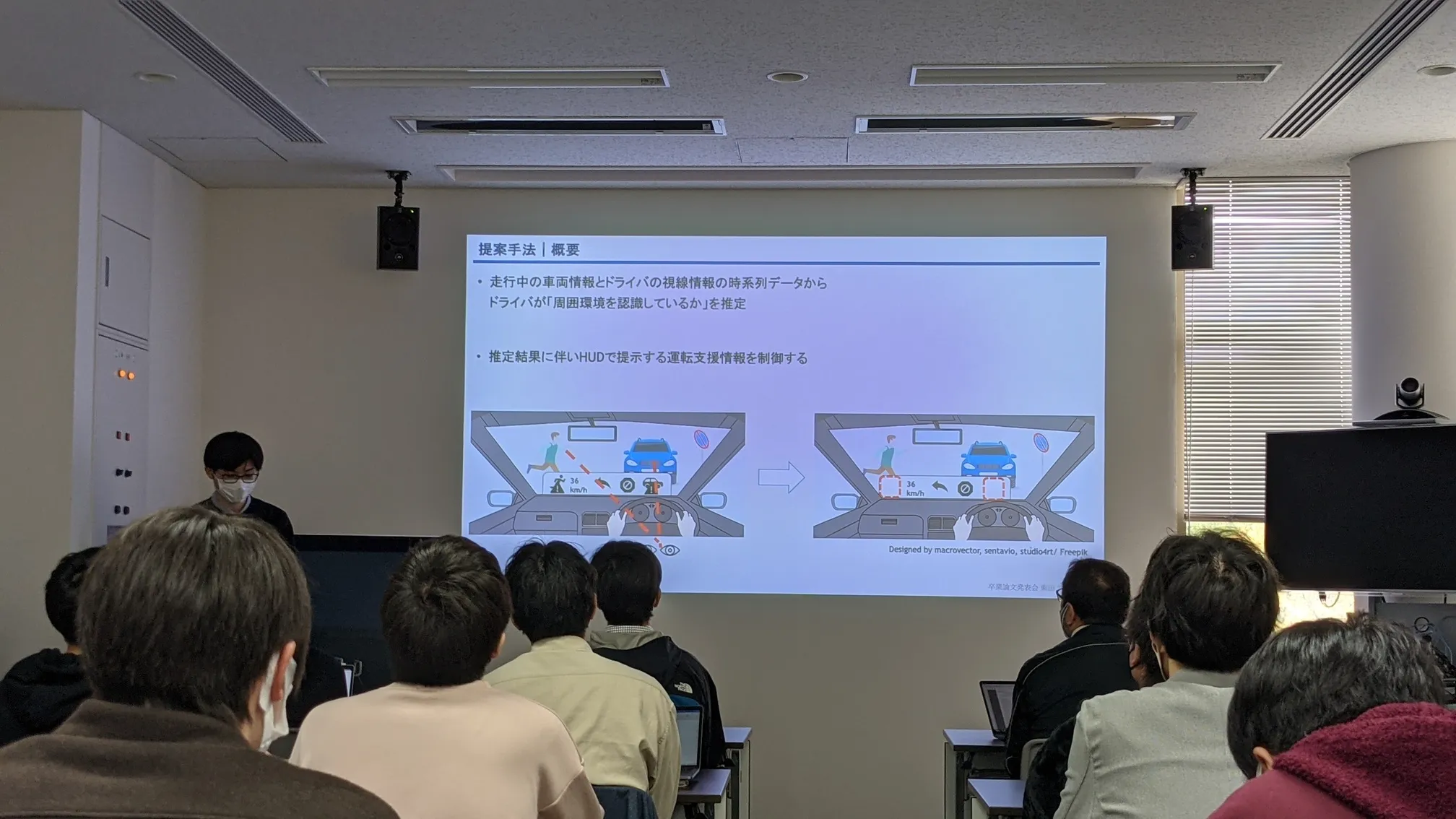
近年,様々な運転支援機能が普及したことによりドライバが取得できる情報が増加している.走行中の車両情報や周囲環境の認識を支援する様々な運転支援情報をドライバに提示する手法として,車両のフロントガラスに虚像を投影することで視覚的に伝えるHUD(Head Up Display)がある.HUDは従来の自動車の情報ディスプレイと比較して,脇見運転をせず早期に運転支援情報の取得が可能な点において優れており,これを用いて運転支援を行うための機能開発が行われている.しかし,提示する運転支援情報が過多である場合は,運転支援情報への認識時間が長くなってしまうため,ドライバの周囲環境への注意力の低下が原因となり,運転の安全性を損なう可能性がある.また,ドライバの認識や判断を考慮せず,ドライバが既に認識している周囲環境のものにも運転支援情報を提示した場合,それらは冗長なものとなる.したがって,ドライバが前方を向いているにも関わらず,周囲環境を認識できていないような,ドライバの意識の脇見を考慮した機能や,提示する運転支援情報の冗長性の排除が必要となる.そこで,走行中の車両情報であるステアリングのふらつき度合からドライバ個人の運転負担を予測し,提示する運転支援情報の制御を行う手法があるが,この手法ではドライバの周囲環境に対する認識状態を考慮していない.そのため,ドライバが未だ認識していない周囲環境の運転支援情報を提示せず,すでに認識している運転支援情報を提示する可能性がある.したがって,ドライバの周囲環境に対する認識状態を考慮した運転支援情報の制御が必要である.本研究では,走行中の車両情報とドライバの視線情報を用いてドライバが周囲環境を認識しているか推定し,提示する運転支援情報を制御する手法を提案する.
移動環境におけるビデオストリーミング品質向上のためのMPQUIC スケジューラの検討(松下 翔太)
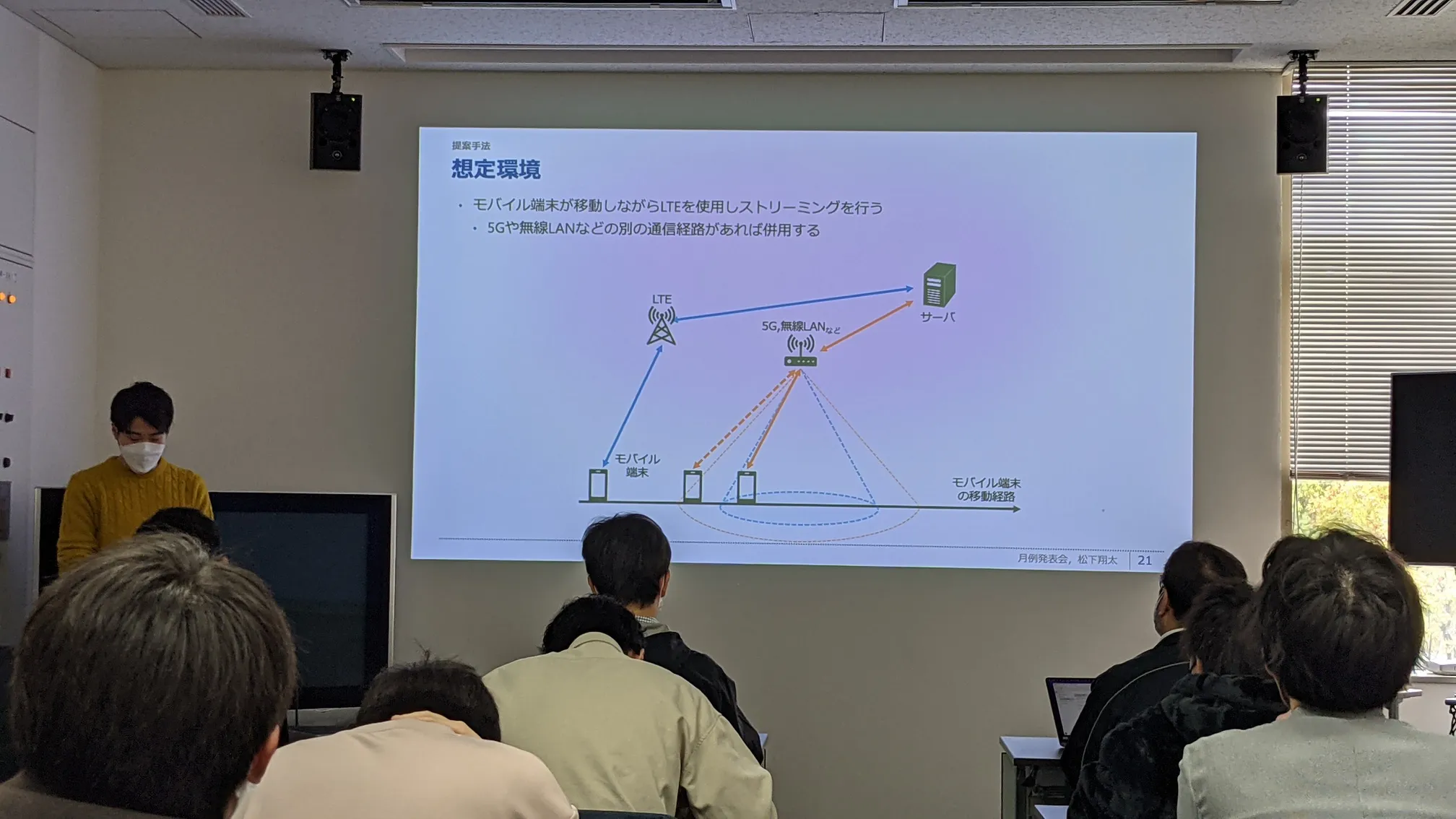
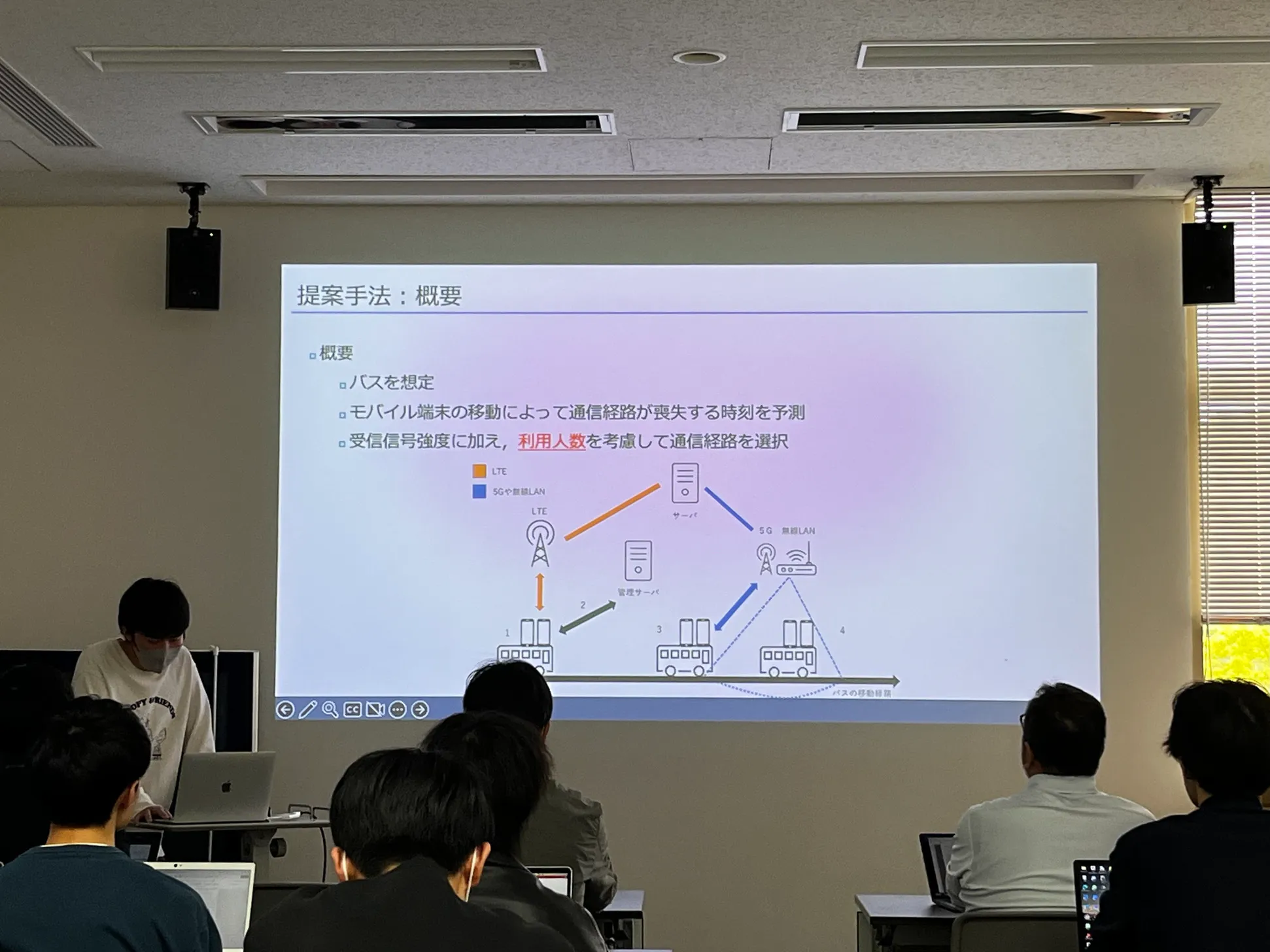
近年、情報通信技術の高度化により、スマートフォンなどのモバイル端末でもビデオストリーミング(以下、ストリーミング)を視聴することが可能になっている。そのため、電車やバスなどの公共交通機関や自家用車に乗って移動しながら、ストリーミングを視聴する機会が増えており、ビデオコンテンツの需要が高まっている。ストリーミングにおいて、その品質に着目すると、パケットロスや遅延などによりストリーミングが停滞することのないように通信帯域を確保することが必要となる。そこで、LTEや5Gといったセルラー回線や無線LANなどの複数の通信経路を併用することで通信帯域を確保する技術である、マルチパストランスポートプロトコルが注目されている。しかし、5Gや無線LANを利用する場合、ユーザの移動によって5Gや無線LANとの距離が遠くなり、通信経路を喪失し、パケットロスが発生する。到達できなかったパケットは再送されるが、再送による遅延が発生し、ストリーミング品質が低下するという課題がある。そこで本研究では、移動環境下のモバイル端末でストリーミングを行う状況において、受信信号強度に応じて通信経路を選択する手法を提案することで、経路喪失によるパケットロスおよび遅延を削減し、ストリーミング品質向上の効果を検討する。
ユーザの意思を考慮したホームネットワークにおけるトラフィック優先度制御手法(坂本 拓馬)
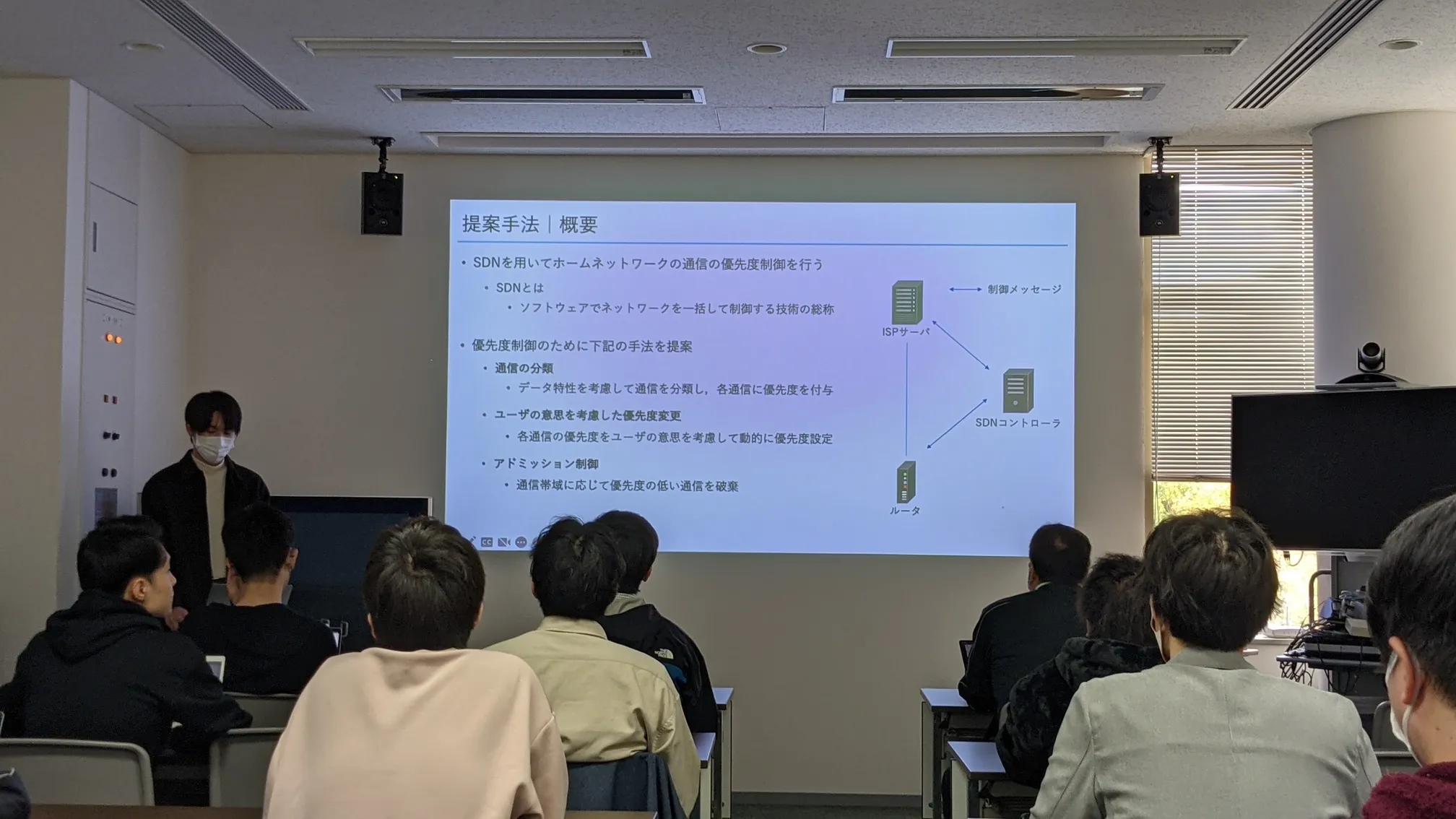
近年,大容量データの増加により,家庭内に構築したLAN環境であるホームネットワークとインターネット間の通信帯域の逼迫が危惧されている.また,IoT機器の普及により,ホームネットワークに接続される機器が増加しており,重要度やQoS要件などのデータ特性の異なる通信が存在する.そのため,データ特性を考慮せずに通信を制御すると.通信帯域が逼迫した際に,重要な通信のパケットロスやQoSの低下などの問題が生じる恐れがある.この問題を解決するために,重要度やQoS要件などのデータ特性を考慮して通信を4つのカテゴリに分類し,状況に応じて動的に優先度を設定する優先度制御手法が提案されている.この手法は,各カテゴリに優先度を設定し,動的な優先度の変更を行っている.しかし,ホームネットワークにおいて多くの通信が存在する環境でデータ特性のみを考慮して優先度の変更を行うと,同じデータ特性の通信が複数存在した場合,ユーザが必要とする通信が低優先度に設定されるなど,ユーザの意思が反映されない可能性がある.ホームネットワークでは,ユーザによって通信の重要度や需要が変化し,ユーザの意思が反映されない場合ユーザが必要とする通信が破棄される恐れがある.本研究では,データ特性の考慮に加え,各トラフィックにユーザの意思に応じた優先度の付与を行うことで,ユーザによる重要度や需要の変化に応じてトラフィックを制御する優先度制御手法を提案する.
協調型自動運転車両のセンサ検知範囲の重複度に応じた送信間隔割り当て手法(山崎 慎也)
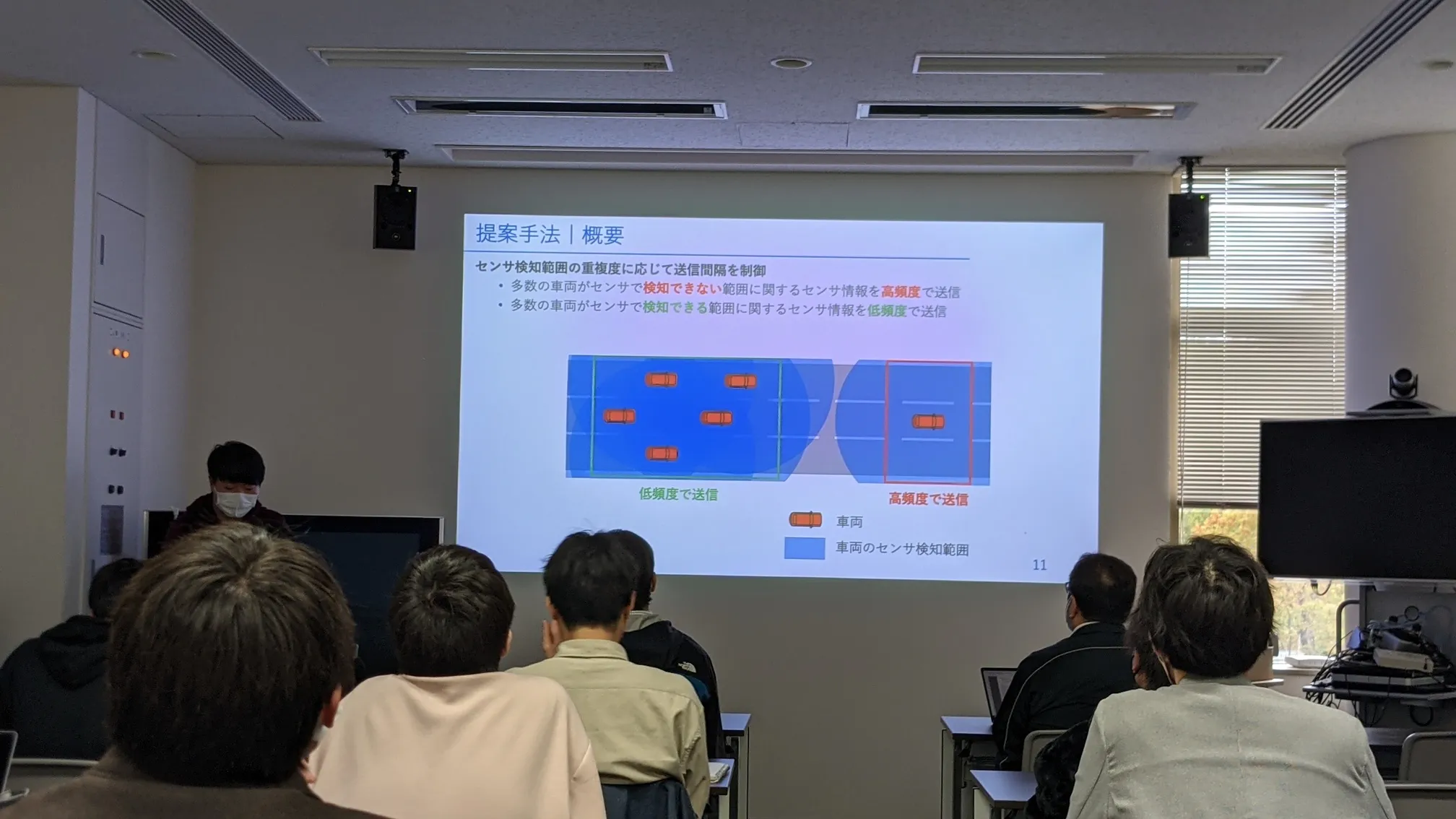
近年,自動車交通の安全と効率の向上のために,車両に搭載されたセンサを用いて周辺環境を認識し自律走行を行う自動運転車両の開発が行われている.しかし,自車両のみでの周辺環境の認識では,センサが検知できる範囲が限定的であるため,見通しの悪い交差点や物陰からの急な飛び出しに対して対応が困難であるという問題がある.このような問題に対して,周辺車両や路側機などと通信しセンサで検知した車両や人などの周辺環境の情報を共有する協調型自動運転車両(CAV:Connected Automated Vehicle)の研究が行われている.しかし,協調型自動運転において,多数のCAVからセンサ情報を受信することにより,通信帯域が逼迫するという問題がある.通信帯域が逼迫することでCAVが他に必要な物体に関するセンサ情報を受信できなくなる可能性があり,周辺環境の認識が低下し交通の安全性の低下に繋がる.本研究では,CAVの通信帯域の逼迫により周辺環境の認識が低下するという問題に対し,各CAVが対象車両と他の車両のセンサ検知範囲の重複度に応じて対象車両のセンサ情報の送信間隔を決定することで,通信帯域の逼迫を低減し対象車両の周辺環境の認識を高めることを目的とする.CAVの通信を模したネットワークシミュレーションによる評価を行うことで,CAVの安全性と通信帯域の逼迫の低減についての有効性を検証する.
協調型自動運転に向けた複数路側センサのフリースペース情報統合(佐々倉 瑛一)

近年自律型自動運転において,車両周辺の走行可能領域としてフリースペースの利用が検討されている.フリースペースとは車両が走行可能な領域として定義されるもので,車両や歩行者等の物標がないと判断された部分を指す.しかし,車載センサのみでは,見通しの悪い交差点など死角にいる他車両や歩行者を検知できないため,各車両の車載センサや路側センサから得られたセンサ情報を通信技術を用いて共有する,協調型の自動運転が安全性を向上させると考えられている.自律型自動運転での利用が検討されているフリースペースであるが,本研究ではこれを協調型で利用することを考える.