こんにちは,広報の馬渕(B4)です.
2025年5月10日の第167回月例発表会 午前の部において,馬渕 皓輝(B4),光久 祥矢(B4),佐野 嵩斗(B4),小野 真如(B4),末澤 智崇(B4),小林 孝広(B4)の6名が以下のタイトルで発表を行いました.
内容は卒業論文の研究テーマ検討となっております.
協調型自動運転における Hybrid C-V2X を用いた通信遅延削減と安全性向上の検討 (馬渕 皓輝)

自動運転技術に関する研究では,V2X(Vehicle-to Everything)通信技術を活用し,車両情報を含む道路の動的情報を他の車両と共有して走行する協調型自動運転が検討されている.V2X通信の分類は4種類あり,車車間通信のV2V(Vehicle-to-Vehicle)通信,車両と道路インフラ間の通信のV2I(Vehicle-to-Infrastructure)通信,車両と歩行者の間の通信のV2P(Vehicle-to-Pedestrian)通信,車両とネットワークの間の通信のV2N(Vehicle-to-Network)通信がある.また,V2X通信の中でも,LTEなどのセルラー網を利用する手法は,特にC-V2X(Cellular-V2X)通信と呼ばれる.C-V2Xの実現方式には,PC5-based LTE-V2XとUu-based LTE-V2Xの2種類がある.PC5-based LTE-V2Xは,D2D(Device-to-Device)通信によりLTEカバレッジ内で並列送信が可能であり,V2V通信およびV2P通信に利用される.一方,Uu-based LTE-V2Xは,上りでは各端末から基地局へのユニキャスト配信,下りでは基地局から全端末へのブロードキャスト配信が可能であり,V2I通信およびV2N通信に利用される.V2V通信とV2I通信では,場合により発生する通信量に差がある.V2V通信の計算量は車両台数nに対しO(n^2)となり,車両数の増加により通信量が膨大になる.一方,V2I通信では車両はサーバとの通信のみ行うため,計算量はO(n)となる.車両数の増加により通信量が膨大になることはないが,サーバとの通信を行うため一定の通信量が常時発生する.そこで本研究では,交通状況に応じ,PC5-based LTE-V2Xを利用したV2V通信とUu-based LTE-V2Xを利用したV2I通信を併用するHybrid C-V2Xを提案し,シミュレーション実験により通信遅延削減と安全性向上に対する効果を検討する.
信号停止中を利用した車線変更方式の提案 (光久 祥矢)
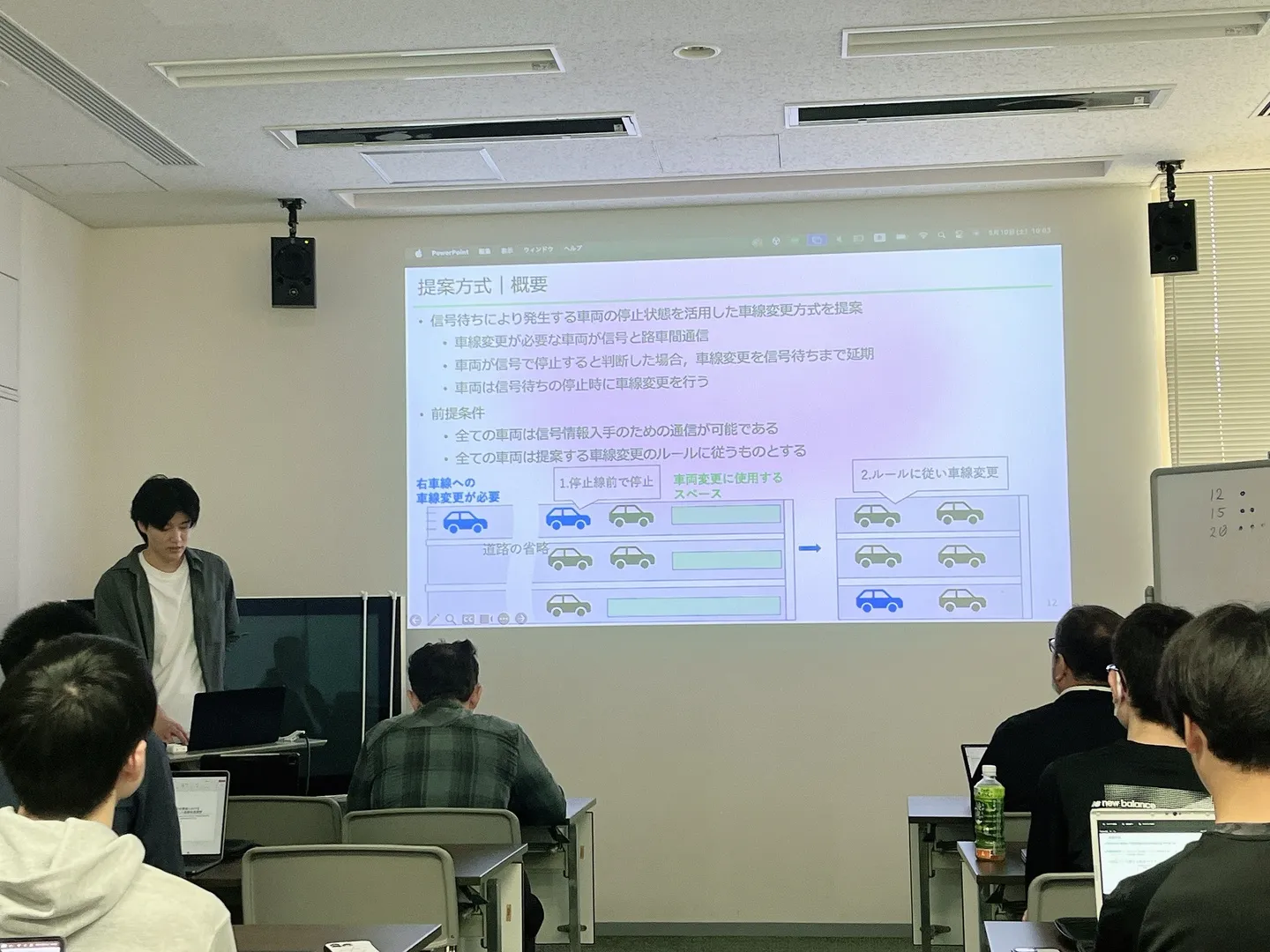
近年,車線変更に起因する事故が依然として発生しており,とりわけ交差点手前における無理な車線変更は,後続車両に急減速を強いることで,追突事故などのリスクを高める要因となっている.国土交通省の調査では,交差点において無理な車線変更が行われ,後続車両が減速している様子が確認されている.このような挙動は,安全な通行を阻害する重大な要因であり,交差点付近における車線変更には安全性の改善が求められる.これまでに車線変更の安全性を高めるため,様々な車線変更支援技術が提案されてきた.それらは主に走行中の視覚認識や周辺環境の推定に基づいており,カメラ,ミリ波レーダ,LiDARなどのセンサ群を活用して,ドライバの意図推定や死角の検出,危険予測などを行う方式が一般的である.しかし,これらの方式は車両が高速で移動する状況での判断と制御を必要とするため,操作の複雑性や人間の反応限界など,適用上の課題が存在する.そのため,車両が高速で移動する危険度の高い状況での素早い判断と制御を必要とせず,複雑な操作を伴わない車線変更方式が必要である.そこで,本研究では,これらの課題に対処するため,車線変更の実行タイミングを「走行中」ではなく「信号停止中」へと切り替えることで,安全性と実装性の両立を図る車線変更の方式を提案する.具体的には,路車間通信(V2I: Vehicle-to-Infrastructure)を活用し,信号機近くの路側機から提供される信号位相および残余時間(SPaT: Signal Phase and Timing)情報に基づいて,信号停止中に安全に車線変更を行う方式を設計する.また,本方式の有効性を交通シミュレーションにより定量的に評価し,その安全性向上効果と交通への影響を検証する.
自動運転と手動運転の混在環境における車間距離の動的調整を考慮した道路合流調停 (佐野 嵩斗)

近年,協調型自動運転の研究が進められている.協調型自動運転は,車両同士が通信し,センサ情報を共有して協調的に走行することが可能である.協調型自動運転において,車両が取得した情報や路側機で検知した情報を静的な地図データと関連付けて共有する技術としてダイナミックマップがある.ダイナミックマップによる協調型自動運転の走行調停手法として時空間グリッド予約が提案されている.時間と道路上の空間をグリッドに分割し,ダイナミックマップを通して各車両が走行したい時空間グリッドを予約・管理する.また,現実の交通環境では,完全な自動運転車だけでなく手動運転車も混在しているため,通信機能を持たない手動運転車を考慮した自動運転車の走行調停が必要となる.先行研究では,手動運転車が混在する現実的な交通環境において,手動運転車をカメラで認識して仮の時空間グリッド予約をすることで,手動運転車との混在環境における協調型自動運転の時空間グリッド予約を実現し,安全性と交通効率の向上を示した.しかし,この研究では,手動運転車の挙動に対応するため,一定の車間距離をあらかじめ確保したグリッド予約方式を用いており,手動運転車の挙動に柔軟に対応することが困難である.そのため,交通効率が低下するという課題がある.そこで本研究では,手動運転車の観測データから信頼度を定量化し,その信頼度に応じて車間距離を動的に拡大・縮小する時空間グリッド予約手法を提案する.これにより,手動運転車の不確実性に応じた柔軟な対応を行い,安全性を確保しつつ,交通効率のさらなる向上を目指す.
FSMDNN によるプレイスタイル模倣精度向上のための状況適応型学習手法の提案 (小野 真如)
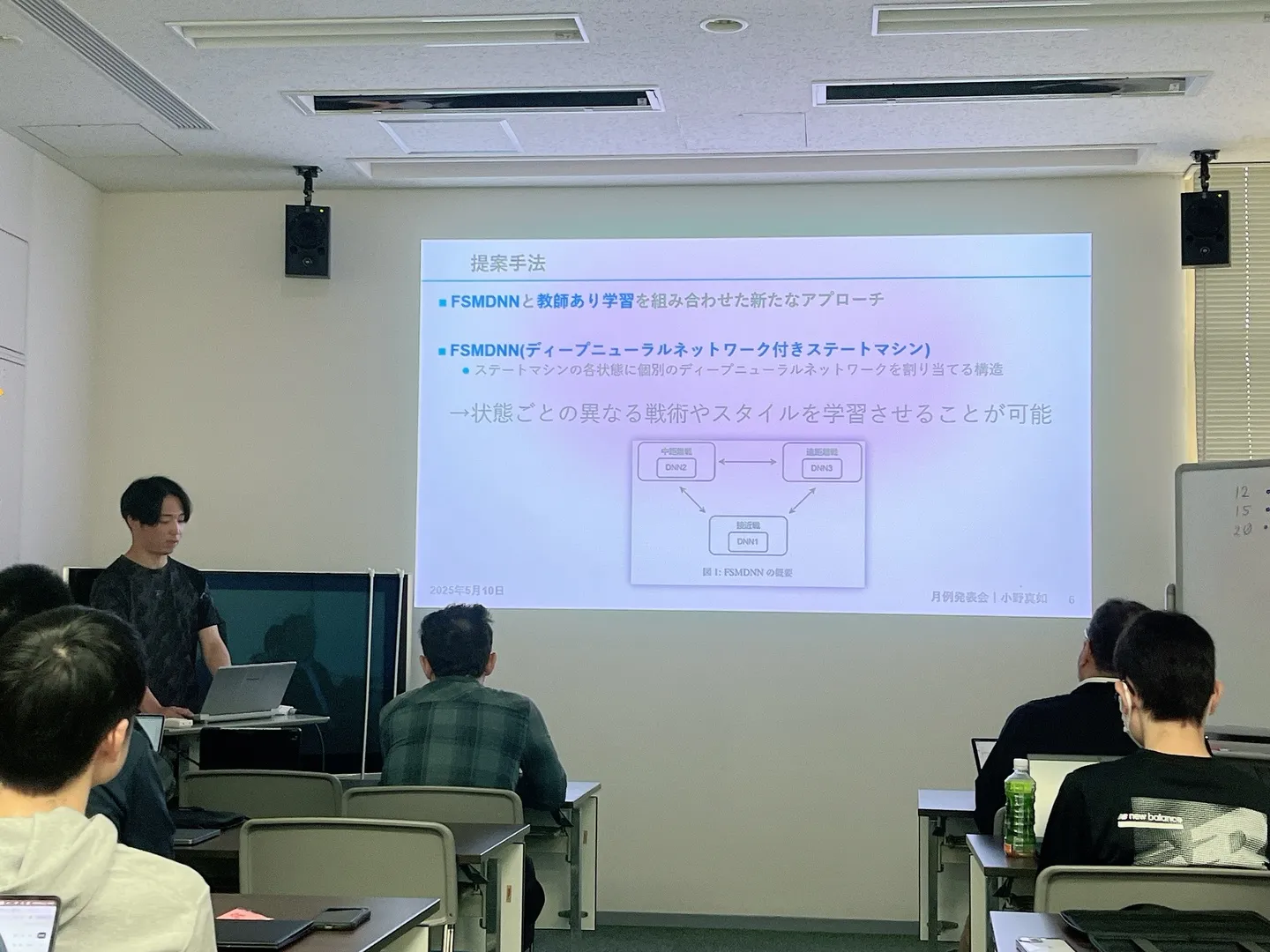
近年,ゲームにおける人工知能(以降AI)技術は著しい発展を遂げており,特に対戦型ゲームにおいては人間を上回る性能を発揮するAIが登場している.一方で,AIの行動が過度に最適化されることで,プレイヤとの対戦において「自然な応答性」や「駆け引きの妙」が失われるという課題も指摘されている.こうした背景の下,プレイヤの行動特性を模倣する研究が注目されつつあるが,その精度はまだ限定的であり,特に状況に応じたプレイスタイルの動的な変化を再現する点においては未解決の課題が残されている.本研究では,2D格闘ゲームを対象に,特定プレイヤのプレイスタイルを状況に応じて動的に模倣するAIの実現を目指す.AIの模倣精度を向上させることで,プレイヤが行う戦術の変化をより正確に再現し,自然な対戦・協力体験を実現する.これにより,ゲームにおけるユーザ体験が期待され,プレイヤにとってより魅力的なゲーム体験を提供することが可能となる.
ダイナミックマップシステムにおけるQUIC 通信の負荷分散を前提としたエッジサーバ構築の検討 (末澤 智崇)
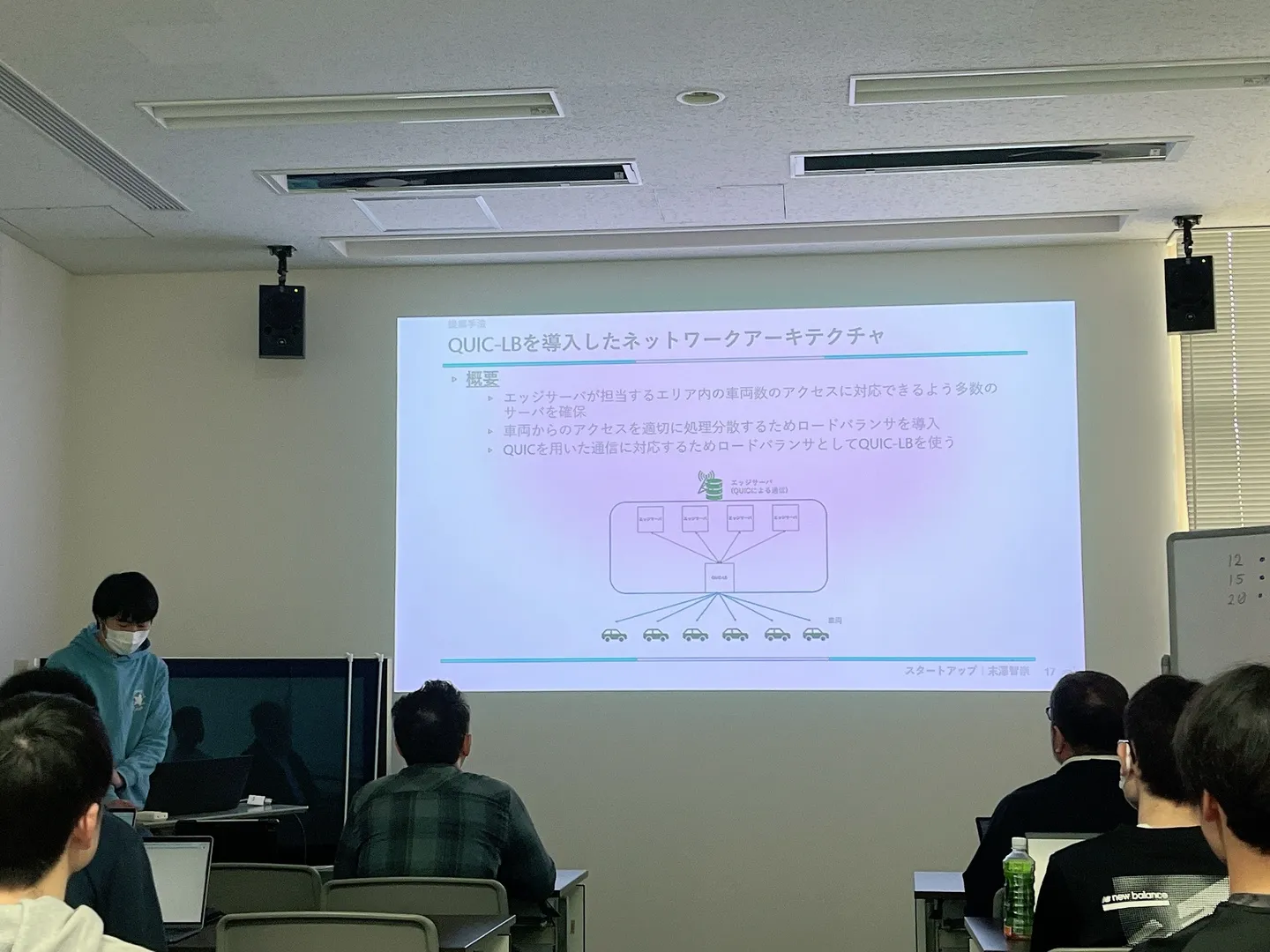
近年,車載センサや路側機器で収集したデータを静的な高精度地図データと関連付けて共有することで,車両の安全運転支援に活用するダイナミックマップシステムが注目されている.ダイナミックマップシステムでは,リアルタイムでの処理が求められるため,図1のようなクラウドサーバ,エッジサーバ,車両という三層構造を採用し,分散処理を行うことで,システムの効率性とスケーラビリティを高めている.ダイナミックマップシステムでは,通信プロトコルとしてUDPが用いられているが,UDPは暗号化機能を備えておらず,また,クライアントのIPアドレスの変化に対応できないという課題がある.そのため,より安全で可用性のある通信プロトコルであるQUICによる通信を行うことが期待される.QUICは,2021年に標準化され,従来のUDPに加えてTLSを利用した暗号化や通信中の機器のIPアドレスが変更されてもコネクションを維持できるコネクションマイグレーションという機能を提供し,移動体通信に適した特性を持つ.しかし,車両とエッジサーバ間の負荷分散を従来のL4ロードバランサで行うと,QUICのコネクションマイグレーションに対応できず,車両とエッジサーバ間での接続が切断されてしまうという問題が生じる.そこで本研究では,QUIC通信に対応したロードバランサであるQUIC-LBを導入し,車両とエッジサーバ間でQUICの利点を活かすための新たなネットワークアーキテクチャを検討する.
協調型自動運転の隊列走行時における役割割り当てによる通信分散手法 (小林 孝広)
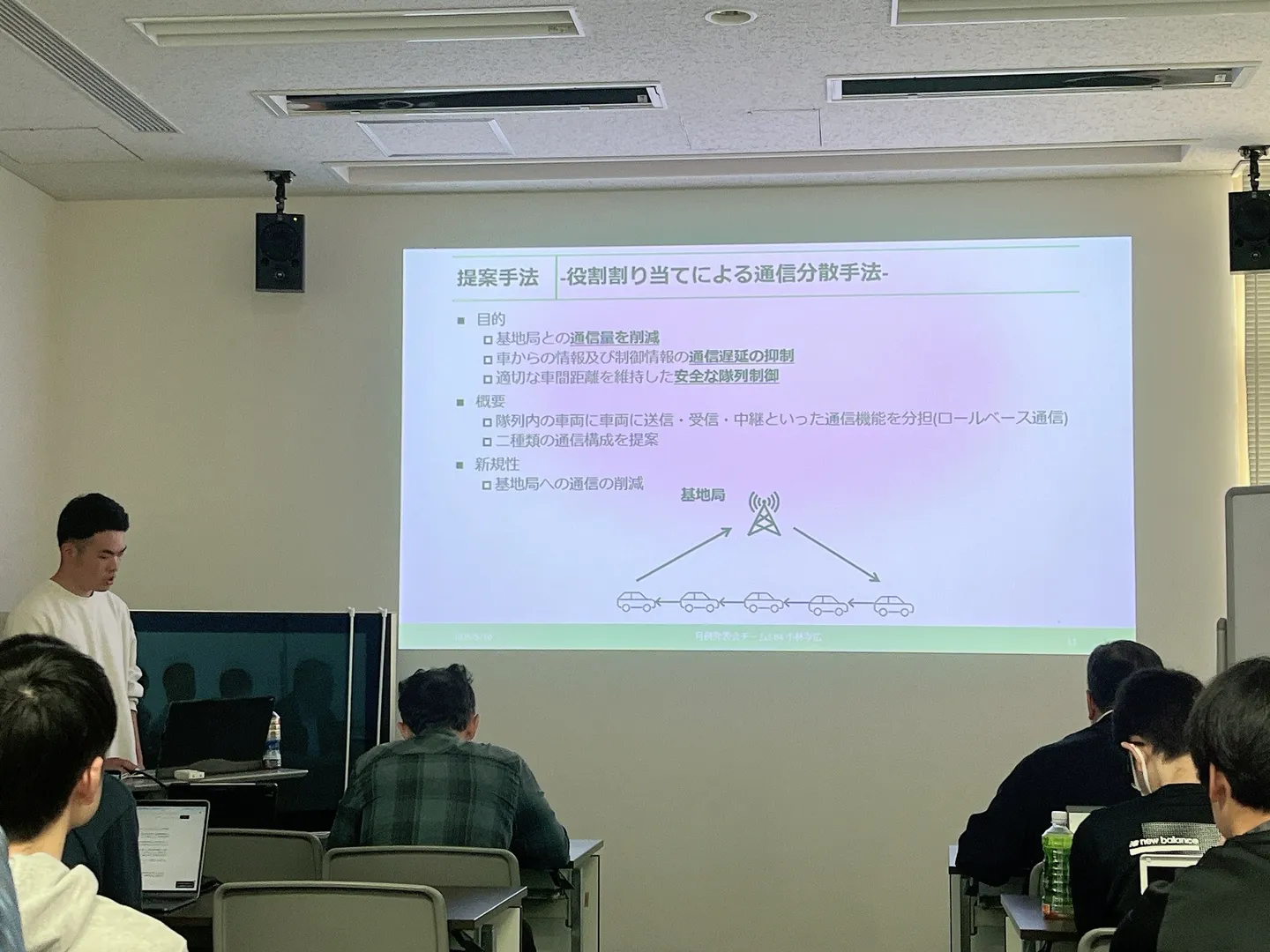
自動運転の実現に向けて,車両間(V2V)や車両とインフラ間(V2I)の通信を活用した協調型自動運転が注目されている.その応用の一つに,複数の車両が一定の車間距離と速度を維持して走行する隊列走行がある.この技術は,燃費の削減や交通安全性の向上といった効果が期待されている.隊列走行ではV2V通信を用いて,各車両が自身の位置・速度・加速度といった走行状態を他の車両とリアルタイムで共有し,適切な車間距離の維持と全体としての安定的な制御を行う.さらにV2I通信を用いることにより,各車両が基地局に接続して広域な交通情報を取得し,それに基づく高度な制御判断を行うことが可能となる.しかし,すべての車両が個別に基地局と通信を行う構成では,車両数の増加に伴い通信量および処理負荷が急増し,通信遅延やリソース競合が発生する問題がある.これにより,制御のリアルタイム性や信頼性が損なわれ,隊列全体の制御精度の低下を招く問題がある.そこで本研究では,V2I間の通信負荷の集中を緩和するために,隊列内の車両に送信・受信・中継などの役割を分担させるロールベース通信方式を提案する.この方式により,通信処理の分散化と基地局との通信量の削減を図る.