2022年8月10日の第140回月例発表会(B4)において,松村 学(B4),森田 暉之(B4),東田 悠希(B4),松下 翔太(B4),谷澤 直大(B4),坂本 拓馬(B4),佐々倉 瑛一(B4),山崎 慎也(B4)の8名が以下のタイトルで発表を行いました.
時空間グリッド予約を実現するマイクロロードプライシングのオークション方式による価格設定手法の提案(松村 学)
近年,工事情報や渋滞情報などの動的情報と高精度3次元位置情報(路面情報,車線情報)等の静的情報を組み合わせたデジタル地図であるダイナミックマップの研究が進められている.この技術を用いることで,協調型自動運転車両が走行予定である経路の時間と空間を事前に予約し,他の車両を排除することで,よりスムーズな走行を可能にする時空間グリッドという考え方が確立された.今後ダイナミックマップの活用や,協調型自動運転車両の普及につれて安全運転支援や渋滞緩和などの役割を果たすと期待されている.
また,ロードプライシングという考えのもと,時空間によって分割したグリッドそれぞれに値段を付け,その時空間グリッドを走行するための予約に料金を必要とするマイクロロードプライシングの実現を目指す研究も行われている.このマイクロロードプライシングでは,車両のスムーズな走行が可能となる一方で,事前予約の優先度がない場合や価格設定によっては,車両の予約が集中する問題が生じ,一部車両の旅行時間の増大が問題点となる.
そこで本研究では,マイクロロードプライシングでの時空間グリッド予約において,車両が支払う料金に応じて予約の優先度を決定するオークション方式を導入する.これにより関連研究に対して出発地から目的地までの旅行時間の短縮を目的とする.
アクセスポイントのセル内における予測離脱時刻を考慮したMPTCP フロー制御の提案(森田 暉之)
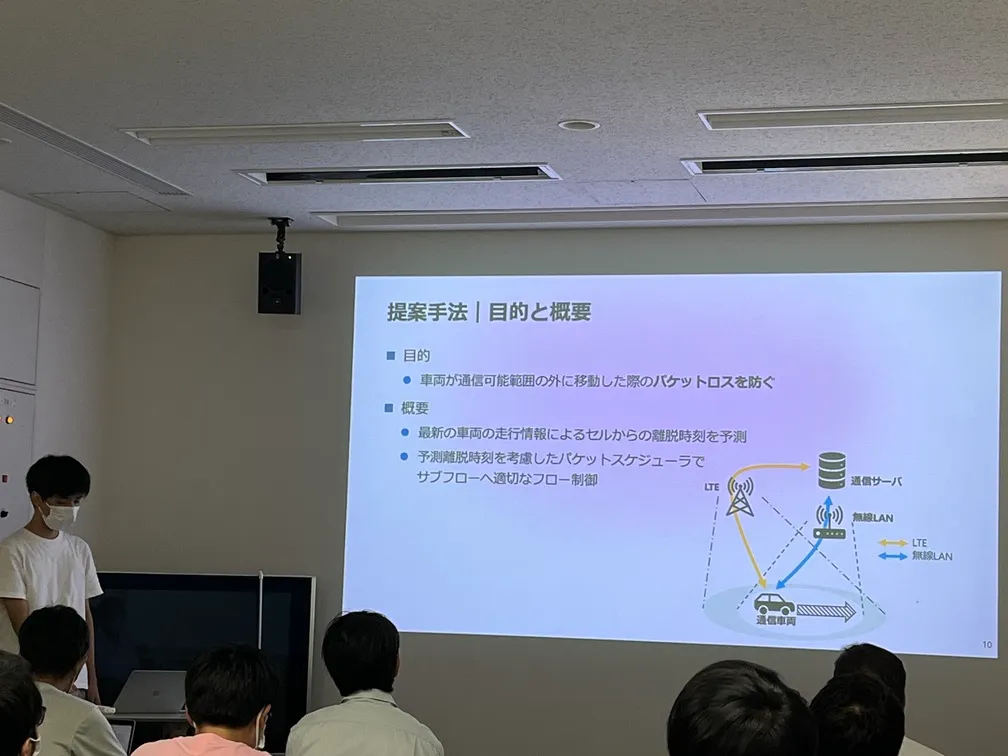
近年,V2N(Vehicle-to-Network)通信の研究が進められている.特に,異なる通信手段を併用できるMPTCP(Multipath TCP)は,帯域集約と通信エリアの拡大に加え,耐障害性の向上も見込まれており,車両の通信プロトコルとして注目されている.
MPTCPでは,パケットスケジューラが各サブフローへのフロー制御を担い,サブフローの通信特性を加味した上で,パケットの割り当て先の決定を行う.また,複数のサブフローを展開することにより,サブフローの障害に対して,他のサブフローで通信を継続することができる.しかし,MPTCPをV2N通信に適用した際,サブフローの切断によりパケットロスが発生する.例えば,MPTCPで通信している車両がアクセスポイントの通信範囲外に移動した場合,車両からの確認応答が届かず,再送タイムアウト後にパケットの再送信が発生するため,パケットロス数や再送までの遅延時間は大きくなる.一方で,車両の自動運転や運転支援における通信内容は,高い信頼性と通信の安定性が求められ,遅延時間に対して厳しい制約が設けられている.つまり,車両が無線通信接続を頻繁に切り替える環境において,MPTCPには通信経路の急激な変化に対応できるパケットスケジューラが必要である.
そのため本研究では,車両とサーバ間の通信を想定し,セルからの予測離脱時刻をもとにMPTCPのフロー制御を行うパケットスケジューラを提案し,その有効性を示す.
走行時の車両情報とドライバーの視線情報に基づく運転支援情報提示の制御手法(東田 悠希)

近年,様々な運転支援機能が普及したことによりドライバーが取得できる情報が増加している.運転支援機能の中には,ドライバーに対して車両のフロントガラスに虚像を投影することで視覚的に様々な情報を伝えるHUD(Head Up Display)があり,これを用いて運転支援を行うための機能開発が行われている.しかし,車両の走行中などにドライバーに対して情報を提示する場合,過剰に情報を提示しないなどのドライバーのディストラクション(意識の脇見)を考慮した取り組みが必要となる.そのため運転支援を行うにあたり,情報全てを提示するのではなく,運転行動の阻害が起こらないかつドライバーが必要とする適切な情報を適宜提示するような運転支援情報の制御が必要である.
また,走行中の車両情報であるステアリングのふらつき度合からドライバー個人の運転負担を予測し,提示する情報の制御を行う手法があるが,この手法ではドライバーが周囲の環境に対して認知をどの程度行えているかは考慮していない.ドライバーは主に視覚から外界の情報を取り入れることにより周囲のものを認知するため,ドライバーの視線情報はドライバーが何を認知したか推定するための重要な情報である.
本研究では,ドライバーが車両を走行している際の車両情報に加えてドライバーの視線情報を用いてドライバーが周囲の環境を認知しているか推定し,提示する運転支援情報を制御する手法を提案する.
ビデオストリーミングにおける移動環境を考慮した動的MPQUIC モード選択手法による通信品質向上(松下 翔太)
近年,ビデオコンテンツの需要が高まっており,2022年にインターネットトラフィックのうち82%がビデオストリーミングトラフィックとなることが予測されている.また,ビデオコンテンツの需要増加に伴い,インターネット上のトラフィックが増加したことで,ビデオストリーミングにおいて必要な通信帯域を確保することが困難となり,信頼性の高いビデオストリーミングを安定して配信することが難しくなっている.そこで,LTEや無線LANといった複数の通信経路を併用することで通信帯域を確保する技術が注目されている.しかし,通信状況が変化する移動時の通信環境において,柔軟に帯域を確保できないという課題がある.
そこで本研究では,移動環境下のスマートフォンやタブレット(以下,端末)でビデオストリーミングを再生する状況において,安定した通信帯域の供給を可能にする手法を提案することで,通信品質向上の効果を検討する.
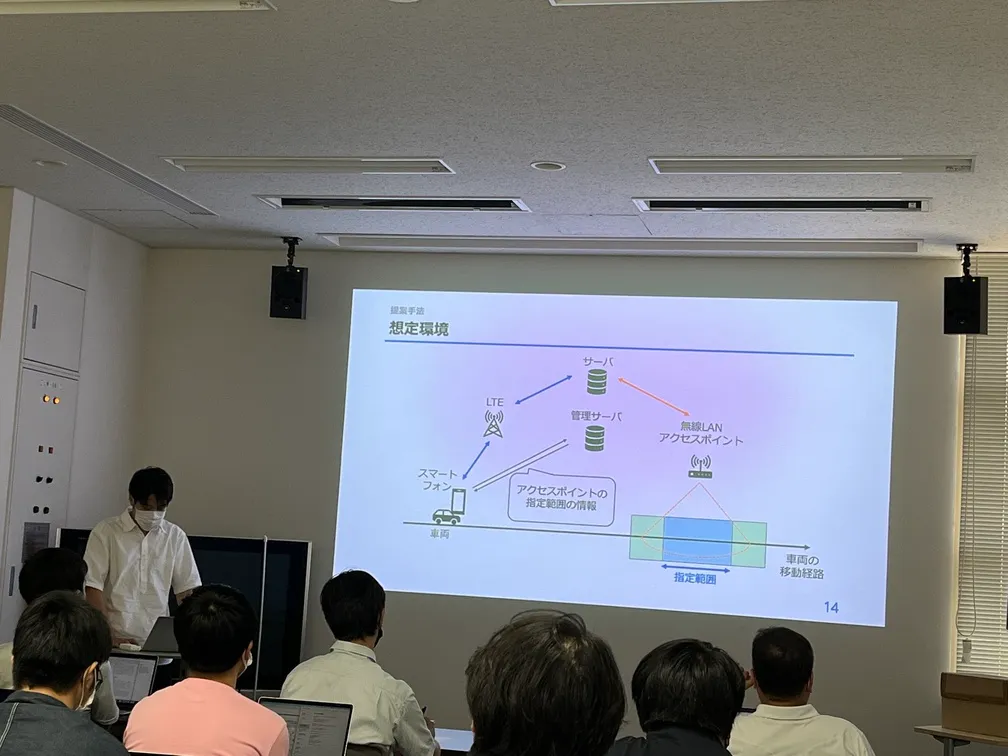
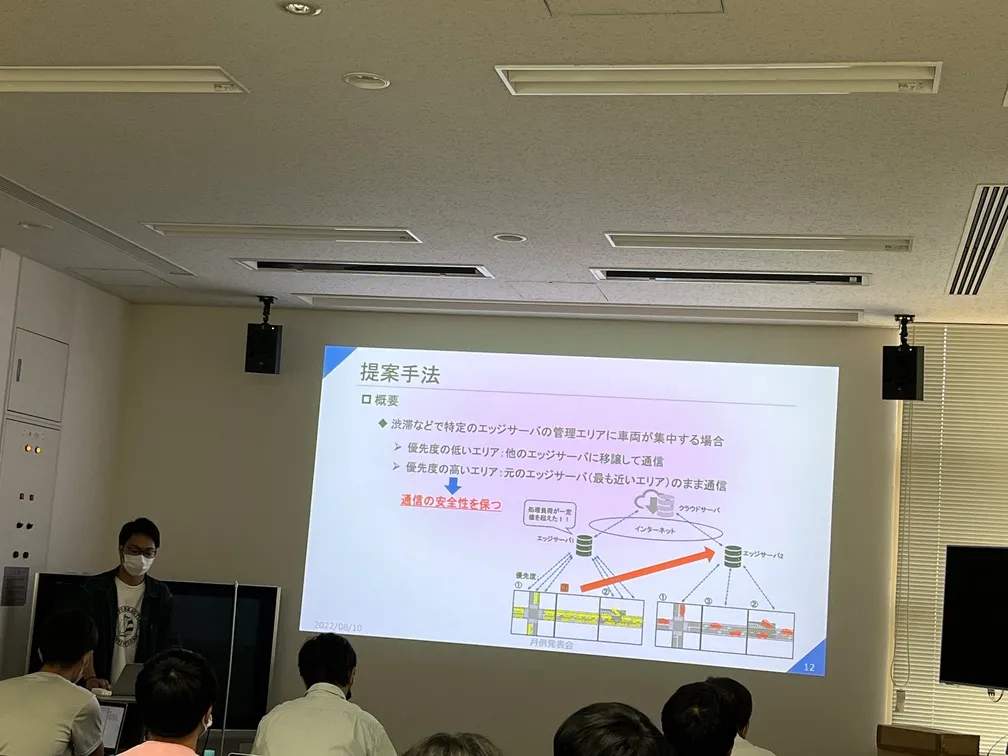
ダイナミックマップシステムにおける安全性を考慮した負荷分散方式の検討(谷澤 直大)
協調型自動運転社会の実現に向けて2020年代に突入し,一定条件下で自動運転が可能なレベル3の市販車の発売が始まり,特定エリアでAI(人工知能)が全ての運転操作を担うレベル4への移行に向けた研究が盛んに行われている.その実現のためには,車載センサやAIの高度化だけでなく,自車位置を正確に認識し,交通状況に応じた予測運転を行うための情報インフラが必要となる.それを実現するための手段として,高精度3次元(3D)地図にさまざまな交通情報などを付加した概念的なデータの集合体である「ダイナミックマップ」というシステムが存在する.ダイナミックマップには,構造物や車線,道路標識などの静的情報,予定されている交通規制や路面で行われる工事全般の情報である準静的情報,現時点で発生している事故や渋滞による交通規制の情報である準動的情報,周辺の車両や歩行者、信号などのリアルタイムの情報である動的情報が存在し,これれらの集合体がダイナミックマップである.ダイナミックマップを利用して,リアルタイムな道路交通状況を管理し,交通支援サービスを提供するプラットフォームをダイナミックマップシステムと呼ぶ.このシステムを用いることで,合流調停や交差点における運転支援など複数の交通支援サービスを提供することが可能になる.
現在研究開発が進められているダイナミックマップシステムは,地理的に分散配置したエッジサーバを利用して処理負荷を分散するシステムである.そこで齊藤らは,エッジサーバ自体の拡張性について考慮し,渋滞などで特定のエッジサーバの管理エリアに車両が集中する場合に,管理エリアの一部を計算資源に余裕のあるエッジサーバに移譲するダイナミックマップシステムの負荷分散方式を提案した.
しかし,関連研究における懸念点として,本来通信を行うエッジサーバよりも離れた位置に存在するエッジサーバに移譲して通信を行うことで,障害物による影響や他の電波の干渉を受けてしまうことなどが考えられる.そのため,走行調停が多く求められるエリアを移譲した場合に,先に述べた懸念点の影響を受け,重要なサービスの提供に支障をきたす恐れがある.しかし,道路環境において安全運転支援などで要求される車両の走行情報は,それぞれの車両の周辺環境状況によって重要度は異なることが予想される.
そこで本研究では,車両の周辺環境状況を事前に予測して優先度を付与し,負荷分散する際,他のエッジサーバに移譲するエリアをその優先度に応じて制御することで,走行調停が求められるエリアに所属する車両の通信の安全性を保つことを目的とする.
ユーザ利便性向上のためのホームネットワーク優先制御システム(坂本 拓馬)
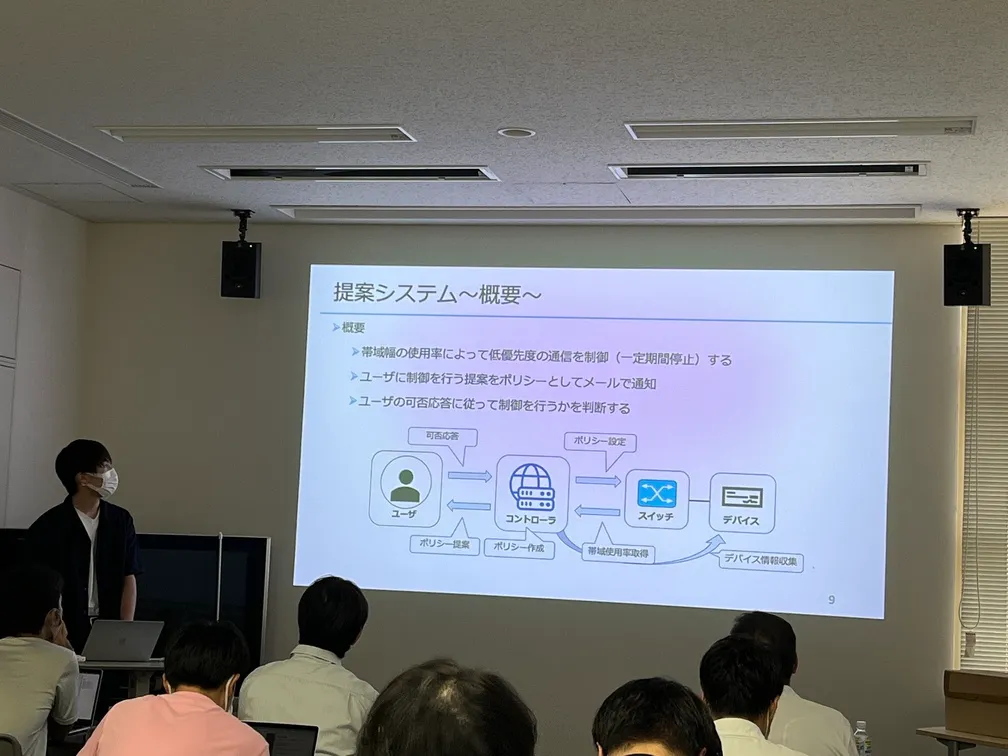
近年,IoTデバイスの普及に伴いスマートホーム化が進む中で,ネットワークに繋がる家庭内デバイスが増加し,ネットワークが複雑化してきている.ホームネットワーク特有の問題として,ユーザのネットワーク知識や意識が低いために,適切なネットワーク設定ができないことが挙げられる.この問題に対処するために,SDNを用いて,あるデバイスがどのデバイスにアクセス許可するか示すポリシーをユーザに通知し,ユーザ自身がネットワーク設定に関する判断を行うことで,ユーザの負担を軽減しつつユーザ自身がネットワークアクセス管理を設定するシステムが提案されている.
また,動画などの大容量データの増加,IoTデバイスの普及,テレワークに伴い在宅勤務が増加したことにより,ホームネットワークにおける帯域の逼迫が危惧されている.通信帯域が逼迫した場合に,動画や音声などが途切れてしまい在宅で行っている業務に影響することや,少ない遅延で確実に伝送される必要があるデータが送信したい時に送信できない問題が生じる.この問題を解決するために,ホームネットワークの通信に対してそれぞれのデータ特性に応じた相対的な重みづけによる優先度を設定し,帯域が逼迫した状況でも優先度の高い通信の品質を保証する優先度制御手法が提案されている.しかし,帯域が逼迫した状況における優先度の高い通信の品質保証を,低優先度の通信を制限することによって実現しており,この低優先度の通信の制限は,設定された優先度に従って自動的に行われている.そのため,ユーザに対して通信の制限の通知を行うことはなく,ユーザのユースケースを考慮していない.例えば,遅延の制約がなく,低優先度に割り当てられるスマートスピーカーによる接続機器の音声操作などが帯域逼迫のために自動的に制限された場合,ユーザが使おうとしても動かないといったことが想定される.ユーザは制限に関して知らされていないため動作しない原因がわからない.そこで,本研究では,帯域逼迫時に優先度制御による低優先度サービスの制限をユーザにポリシーとして通知し,その許可をユーザによって行う.この制限の判断をユーザが行うことで,ユーザ自身が通信の制御に関して判断できる余地を与え,個々のユースケースに対応したホームネットワークの優先度制御システムを提案する.
センサ情報の共有による車両の認識可能フリースペース範囲の拡張(佐々倉 瑛一)
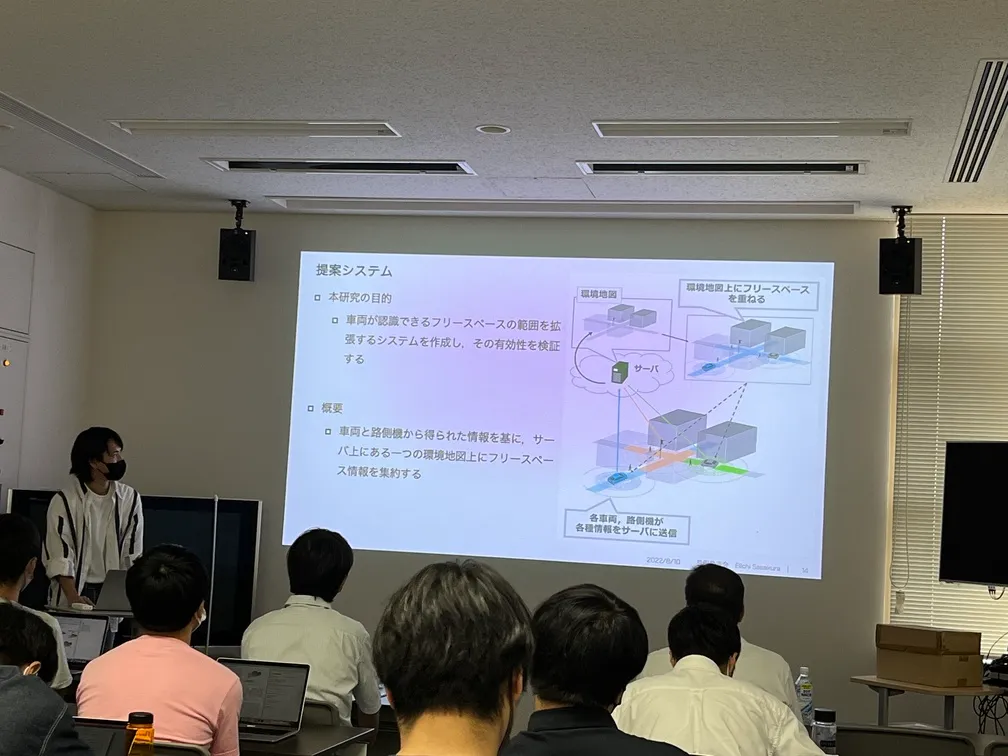
近年,自動運転車の研究が盛んに行われている.自動運転の制御をする際には周囲の状況を把握する必要があるため,自動運転車では車両にセンサを搭載している.しかし,自車両に搭載されているセンサの認識範囲から得られる情報のみでは,交差点において建物等の死角になっている部分に車両や歩行者がいた場合,その車両や歩行者が自車両の視界に入ってから減速するしかなく,出会い頭の衝突を防ぐために自動運転車が十分な速度を出すことができないことや急減速の原因となっていた.そこで,各車両のセンサ情報や路側機から得られたセンサ情報を無線通信で共有し,自動運転車の安全性と走行効率を引き上げを目指す,協調型自動運転の研究が注目されている.本研究では各車両のLiDARセンサ情報と路側機から得られたLiDARセンサ情報を統合することで,車両が認識できるフリースペースの範囲を拡張するシステムを作成し,その有効性を検証する.
CAV のセンサ検知範囲の重複度に応じた送信間隔割り当て手法(山崎 慎也)
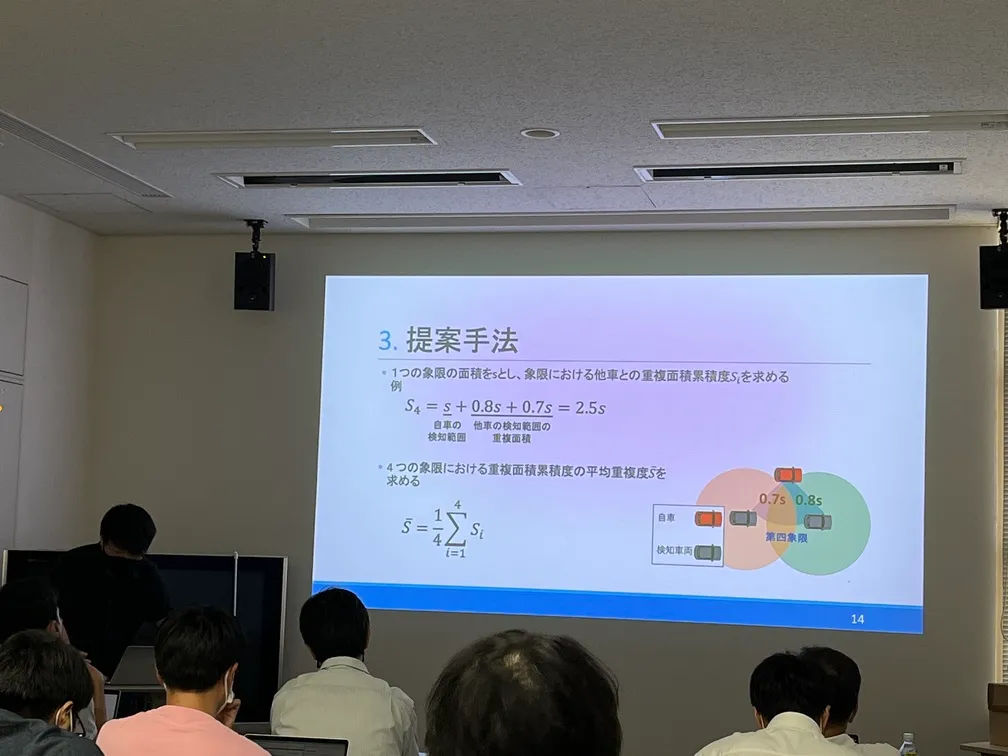
近年,自動運転技術に関する研究が盛んに行われている.2020年11月に,世界で初めて日本は自動運転レベル3の型式指定を実施し,車線維持機能に限定して,高速道路等において60km/h以下の渋滞時等における作動を実現している.日本政府は2025年を目処に自動運転レベル4の実現に向けて高速道路での60km/h以上の自動運転機能の安全基準等の策定を政府目標としている.また,レーザー光を用いて物体までの距離や形状を計測するLiDARやカメラ等の多数のセンサを搭載した協調型自動運転車両(CAV)の研究も注目されている.CAVは常に周辺環境を検知し,そのデータを基に他車両や静的な高精度3次元データに動的な交通情報を集約したダイナミックマップを管理するクラウドとリアルタイムで通信することで,より安全で効率的な道路交通を実現することが期待されている.
しかしながら,多数のCAVの通信による通信帯域の逼迫が懸念されており,動的に変化する道路環境において通信や処理の遅延は事故に繋がると考えられる.従って,通信頻度や通信するデータ量を抑える必要がある.
本研究では,このようなCAVの通信帯域の逼迫を解決するために,CAVのセンサ検知範囲の重複度に応じて冗長性が高いセンサ情報の送信頻度を下げることで動的な送信間隔割り当て手法を提案し,シミュレーションで評価する.