2018年9月19日のFIT2018において,畑山 諒太(B4)の1名が以下のタイトルで発表を行いました.
協調型自動運転における,一車線高速道路合流付近の渋滞緩和手法の検討と評価(畑山 諒太)
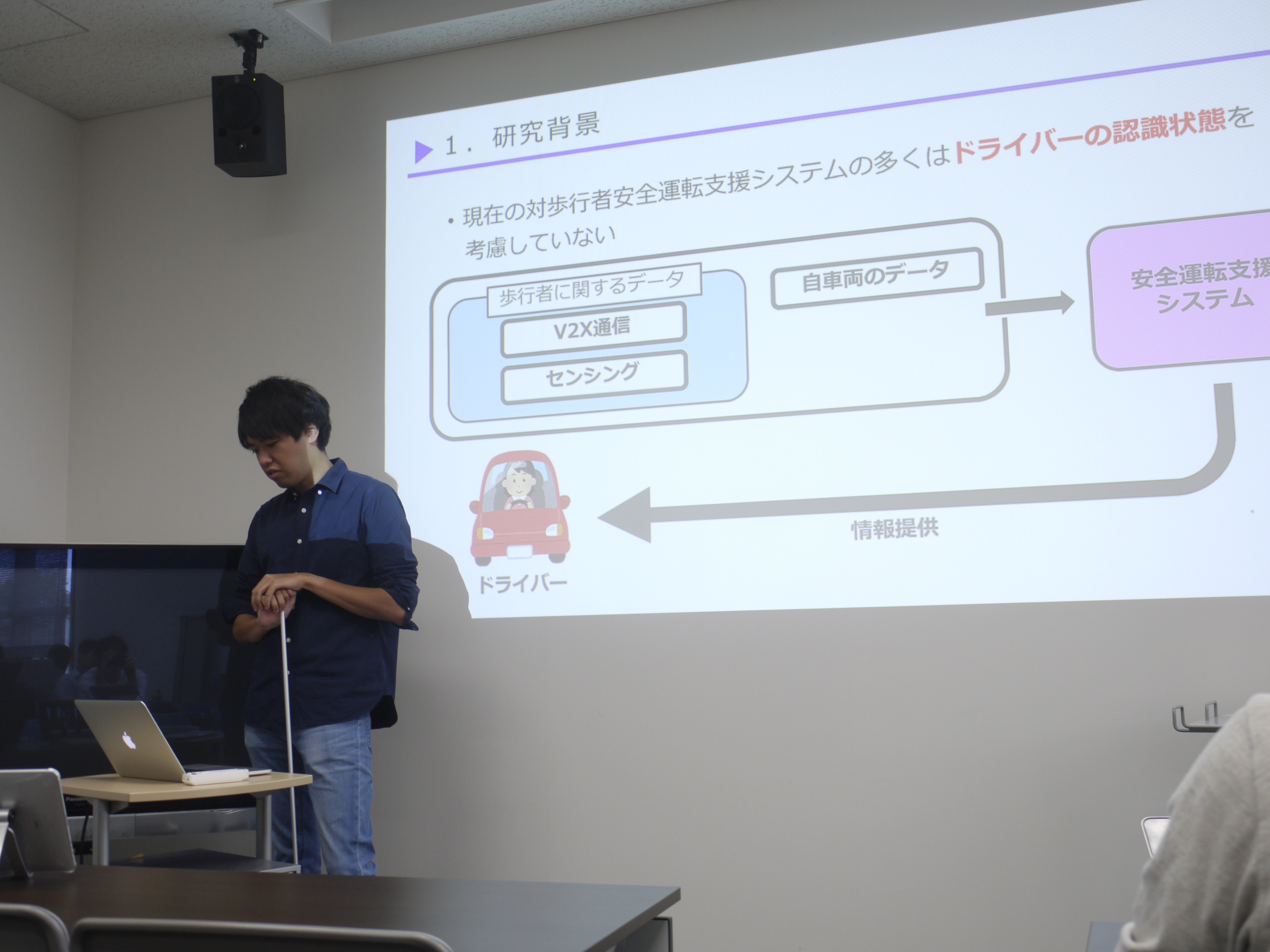
近年,自動運転に関する研究が盛んに行われている.自動運転には二つのシステムがあり,自律型自動運転と協調型自動運転が挙げられる.前者は,車両に搭載されたセンサで得た情報を基に行動を決定し,走行するシステムである.後者はV2X(Vehicle-to-everything)通信を用いた,車車間通信や路車間通信を利用し,走行するシステムである.自律型自動運転では必ずしも,死角などに潜んでいる情報を自身のセンサから得られるわけではないが,協調型自動運転は自身だけでは得られない情報も周辺のセンサから得ることができる.そのため,車車間通信や路車間通信などのV2Xの技術は有用性が評価され,研究が進められている.本研究では,一車線高速道路における,合流地点付近の車両の急な減速による渋滞発生の問題に着目し,協調型自動運転による問題解決を試みる.解決策として,一車線高速道路の合流における車両群の事前の加減速を用いた渋滞緩和手法を提案し,シミュレーションにて,合流地点での協調型自動運転車の協調行動を調整することによって,交通量ごとの最適な協調行動パターンを導き出す.そして,従来の手動運転と効率性を比較し,提案手法の有用性を評価する.