2023年11月15日〜17日に第109回モバイルコンピューティングと新社会システム・第95回高度交通システムとスマートコミュニティ合同研究発表会が開催され,WiPセッションにて松本 翔汰(B4),松下 翔太(M1)が,研究発表会にて東田 悠希(M1),国本 典晟(M2)が以下のタイトルで発表を行いました.
協調型自動運転の車線変更時における通信遅延の影響(松本 翔汰)
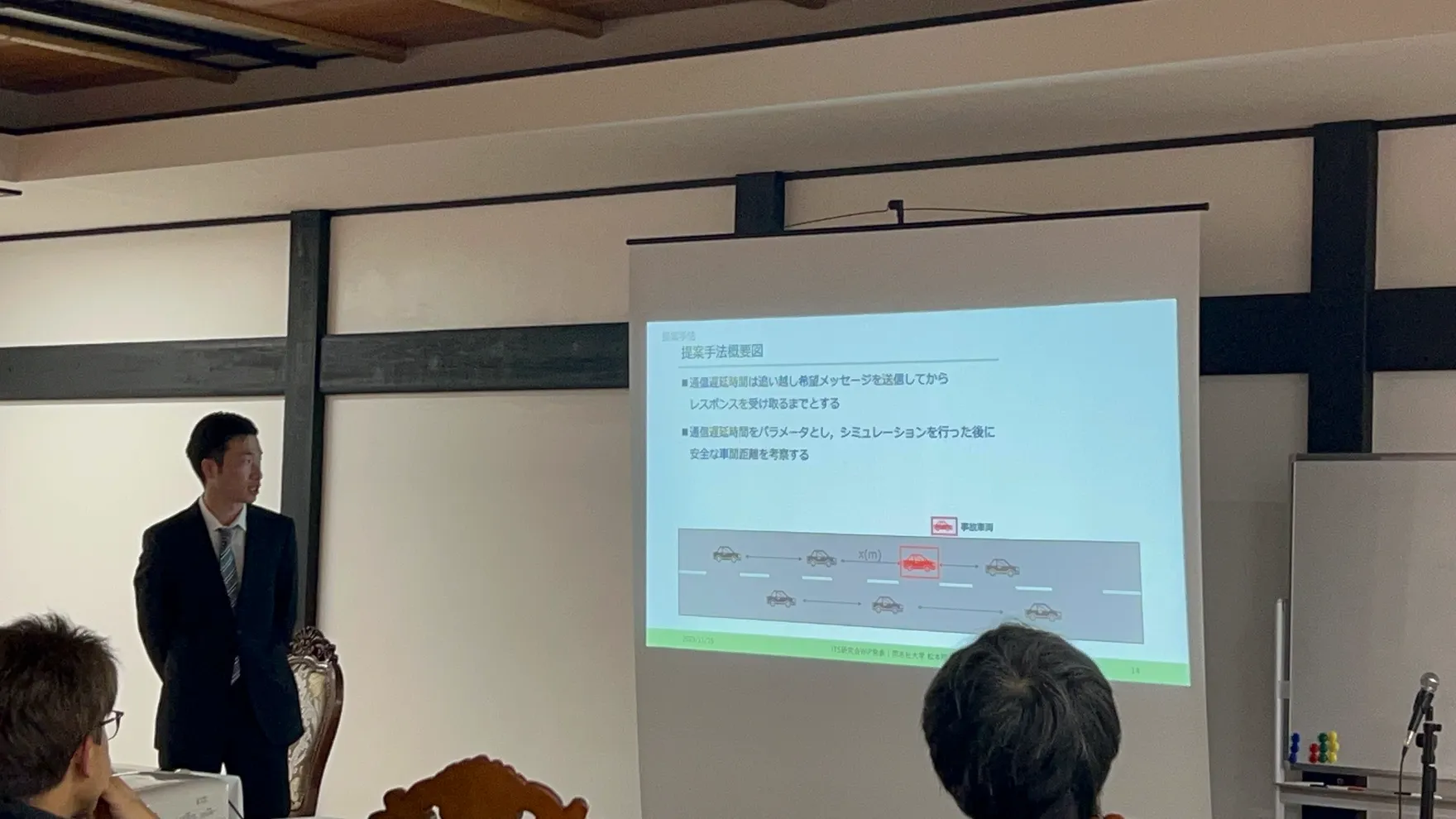
近年,自動運転技術の発展により,快適な移動環境が整ってきている.従来の運転行動では,運転者がすべて操作を行なっていたが,運転支援という形で,自動ブレーキや車線維持などの技術が開発され,社会に普及している.また本年から自動運転レベル4が解禁され,各省庁や地方自治体の協力を得て実証実験等が行われている.さらなる安全な車社会の実現のために,協調型自動運転の研究も行われている.これまで,自車両のみのセンサ情報で周囲の環境情報を取得していたが,他車両やネットワークを介して周辺の状況を共有,認識する.情報の共有および認識のための通信手法として,V2X通信がある.V2X通信には,車車間通信であるV2V(Vehicle-toVehicle)通信,自動車と道路側のインフラ間の通信であるV2I(Vehicle-to-roadside-Infrastructure)通信,自動車と歩行者間の通信であるV2P(VehicletoPedestrian)通信,自動車とネットワーク間の通信であるV2N(VehicletoNetwork)通信がある.V2X通信を使用する際,共有する情報の精度や信頼性の確保が重要になっている.そこで,本研究では,高速道路走行中の車線変更をV2I(Vehicle-to-roadside-Infrastructure)通信とV2V(Vehicle-to-Vehicle)通信の遅延を考慮した上で,信頼性および安全性を担保できる適切な車間距離をシミュレーションによって検討する.
協調型自動運転のためのオブジェクト移動を考慮した占有格子地図の検討(松下 翔太)
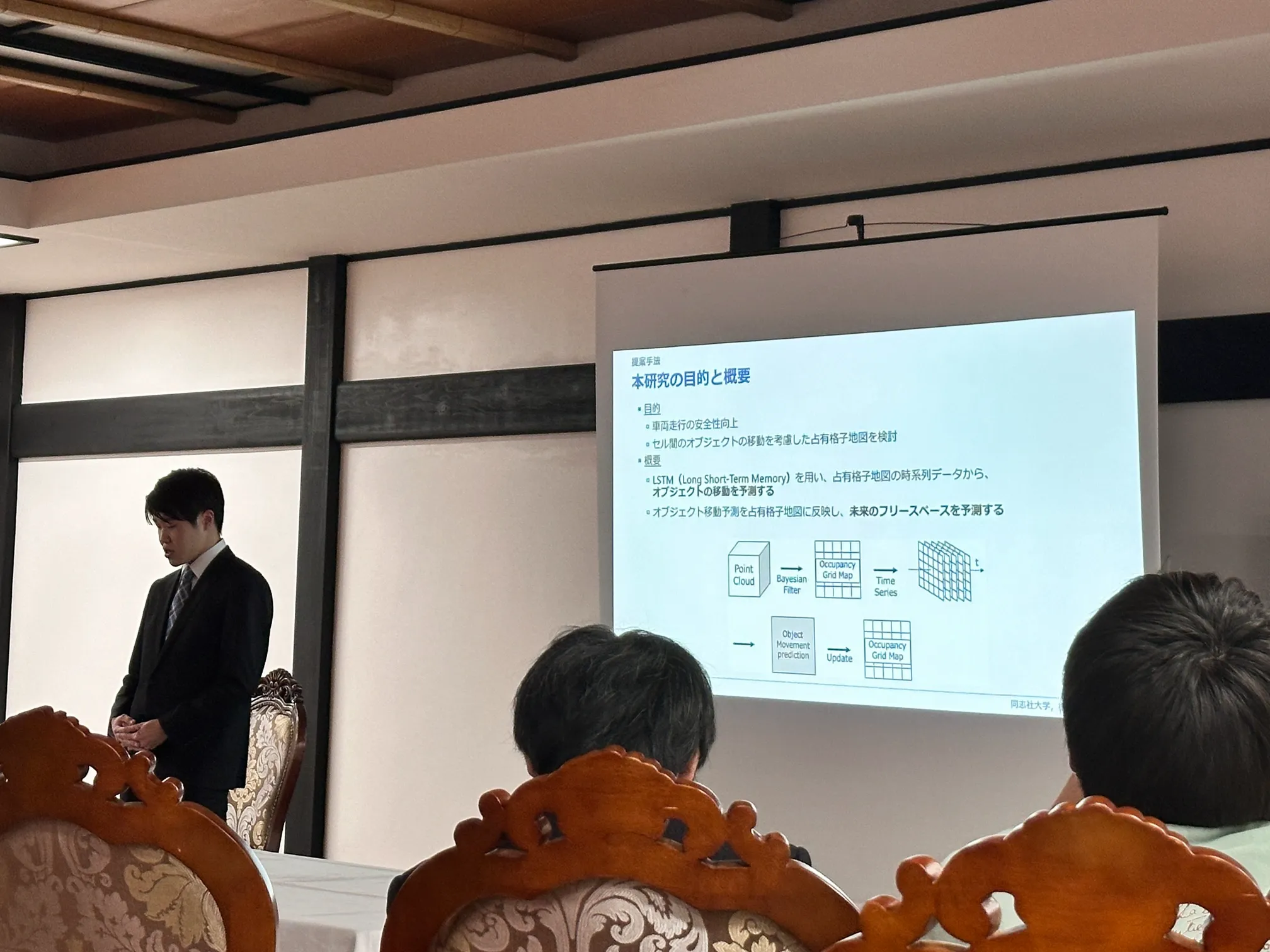
近年,車載センサや路側センサから得られたセンサ情報を通信技術を用いて共有することで,高度な自動運転を実現する協調型自動運転が注目されている.協調型自動運転では,得られたセンサ情報を統合することで,自車両からは死角となっている歩行者や車両などのオブジェクトを検知することができる.センサ情報を統合する手法として,センサ間で共通な格子状の地図を用いる手法である占有格子地図がある.しかし,占有格子地図は各セルが独立してオブジェクトの存在確率を計算するため,セル間でオブジェクトが移動することが考慮していない.そのため,車両の死角から飛び出しがあった場合に,車両の急停止や急減速が発生し,走行の安全性が低下するという問題がある.そこで本研究では,占有格子地図の時系列データを用いて,オブジェクトの移動を予測する手法を提案し,安全性の向上を検討する.
LSHに基づく類似車両抽出によるV2X通信の仮名変更方式の検討(東田 悠希)
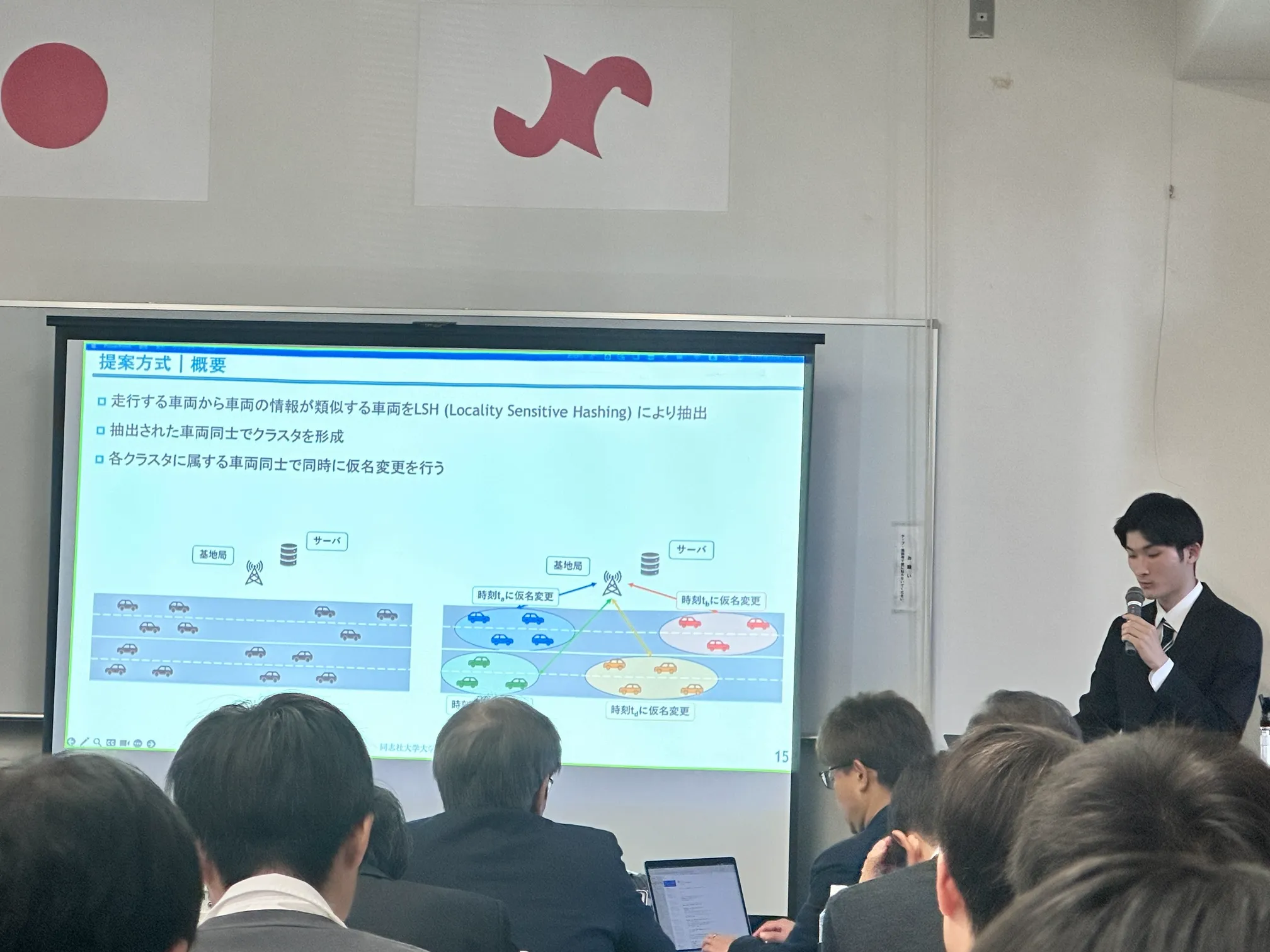
V2X(VehicletoEverything)通信は,車両の速度や位置等の自車の状態を表す情報を周囲の車両やインフラなどへ通信することで,事故の防止や渋滞の緩和など,交通の安全性や利便性の向上につながることが期待されている.しかし,車両が送信する情報は自車両の識別子と紐づけられて送信されるため,悪意のある攻撃者によって車両の送信する情報を継続的に盗聴,追跡されると,ドライバの位置プライバシが脅かされる問題がある.この問題に対し,位置プライバシ保護のため,長期的に単一の識別子を用いるのではなく,仮名と呼ばれる短期的に変更を繰り返す識別子を用いる手法が検討されている.本研究では,車両が送信する情報から車両の速度や位置等で類似する情報を持つ車両をLSH(LocalitySensitiveHashing)により抽出し,より類似した情報を持つ車両同士で協調的に仮名を変更する方式を提案し,位置プライバシ確保の有効性を検討する.
SDNを利用したQoS予測・予約によるV2X通信のシミュレーション評価(国本 典晟)
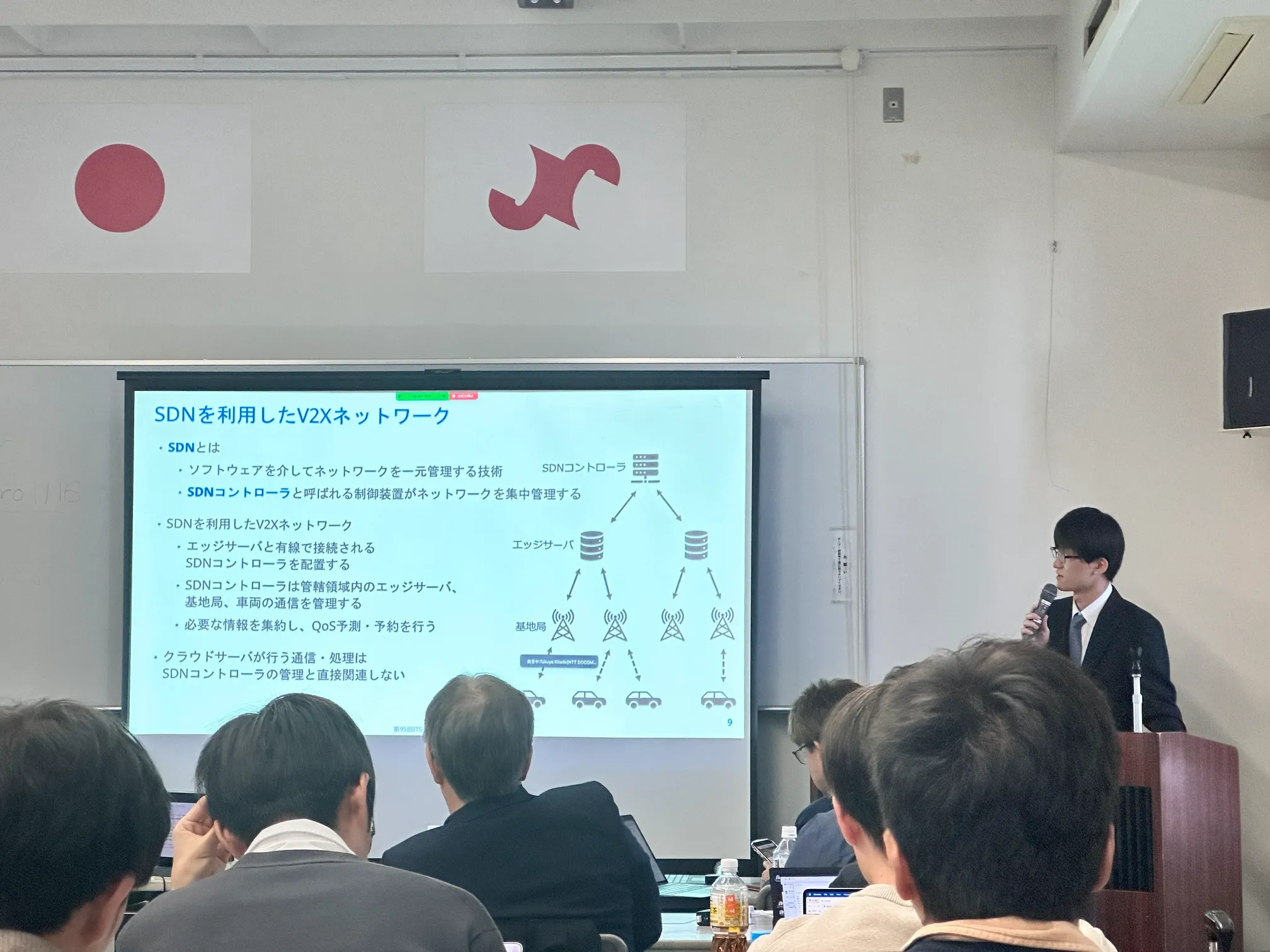
車両に搭載されたセンサで認識できる範囲は限定的であるため,周囲の車両や路側機のセンサが認識した情報を通信により共有することで,交通の安全性や効率の向上を目指す協調型自動運転の研究が行われている.各車両や路側機が収集したセンサデータをサーバ上で集約し,統合した情報を車両に配信することで,車両は自車両の搭載センサでは認識できない情報を取得することができる.しかし,サーバが管轄するエリア内に,サーバまでの通信帯域で収容可能な台数以上の車両が集中した場合,通信帯域が逼迫し,通信の品質(QoS)を保証することができない事態が懸念される.本研究では,ソフトウェアを介してネットワークを一元管理するSDNを利用して,車両の集中状況を事前に想定し,QoSの予測を行う.また,QoS予測をもとにQoSの予約を行うことで,車両のQoSを保証することを提案する.提案手法について,V2X通信のシミュレーション評価を行い,有効性を検討する.