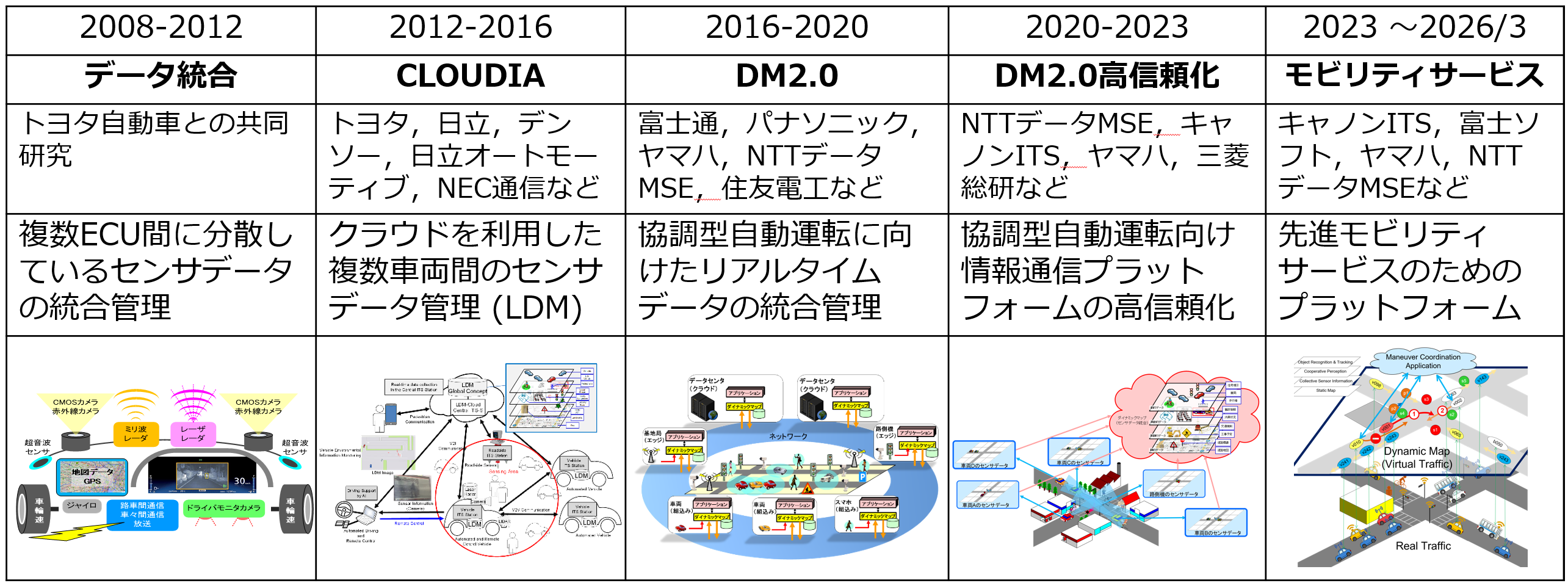
同志社大学モビリティー研究センターは,協調型自動運転のための情報通信プラットフォームであるダイナミックマップの研究開発に関して,名古屋大学大学院情報学研究科附属組込みシステム研究センターと共同でコンソーシアムを設立し,複数の企業に参加頂きながら実施してきており,2026年4月から新たに国内での仕様共通化を目指した活動を開始しています.
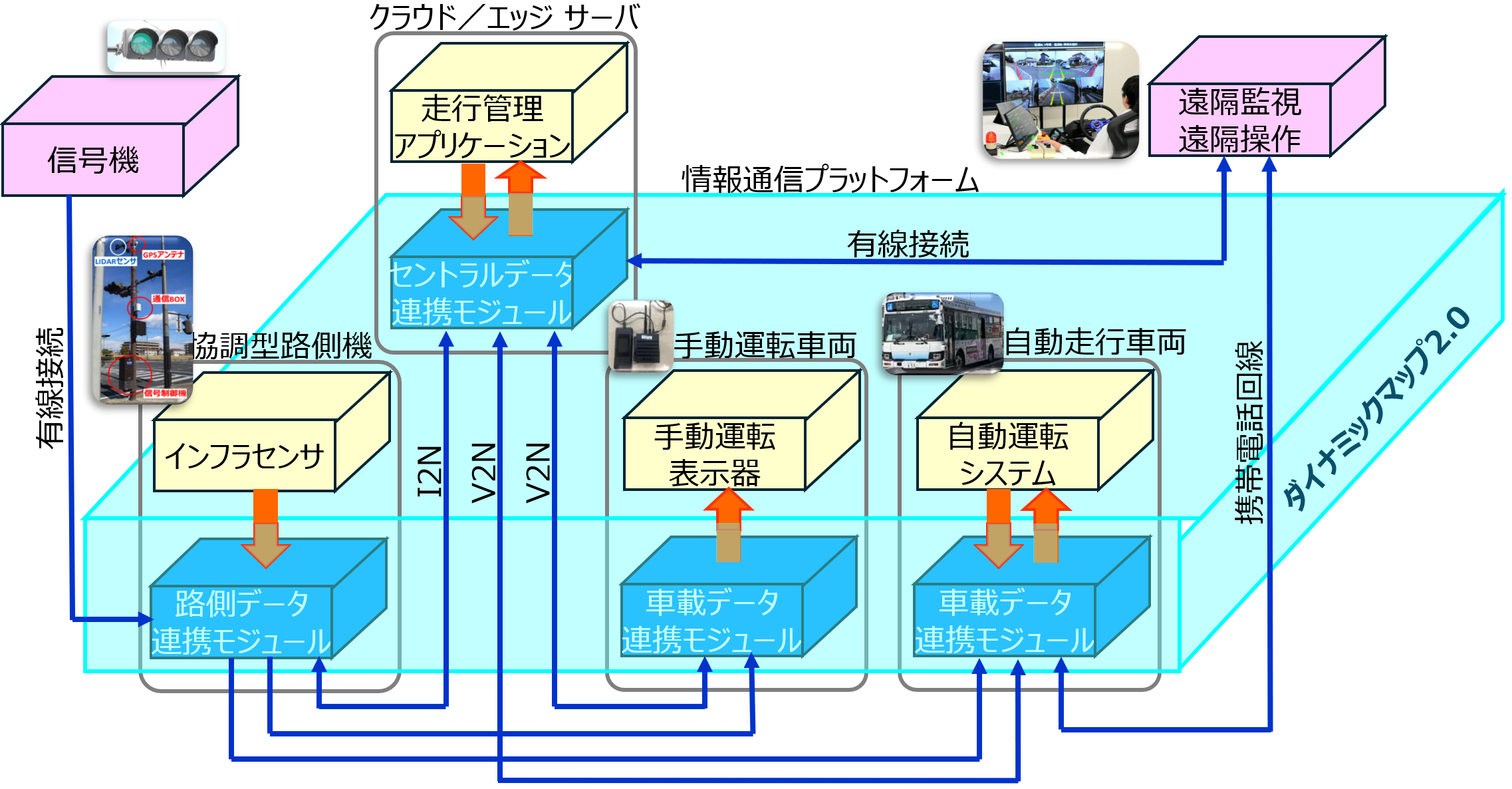
本プラットフォーム(DM2.0 Platform)は,インフラ協調型の自動運転をはじめとした先進的なモビリティサービスを実現する基盤ソフトウェアとして開発し,動的情報(物標情報、信号情報、フリースペース情報など)と静的情報(3次元高精度道路地図など)への横断的な統合・検索機能を提供し,ITS無線や携帯回線などの異なる通信方式を扱い,それらを単独または同時併用することも可能となっています.
協調型自動運転向け情報通信プラットフォームの国内での仕様共通化を目指して,本ソフトウェアは,2026年5月15日に GitHub https://github.com/dm20-consortium/dm20 にて公開しました.オープンソースソフトウェアラインセンスに従って,個人・組織を問わず無償利用が可能となっています.
参考文献:
- Kenya Sato, [Invited Paper] Predictive V2X Communication and Data Sharing Using Future Path Information, Information, Journal of Information Processing, Vol.34, pp.378-388, 2026/6. DOI:10.2197/ipsjjip.34.378
- 佐藤 健哉, 特集 MaaSを支える次世代モビリティ技術, 次世代ダイナミックマップ DM2.0(協調型自動運転に向けた情報通信プラットフォーム), 日本機械学会誌, Vol.124, No.1228, pp.24-26, 2021/3. DOI:10.1299/jsmemag.124.1228_24
- 佐藤 健哉,高田 広章,ダイナミックマップ2.0(DM2.0)の構成と設計,電子情報通信学会 通信ソサイエティマガジン, No.58 秋号, pp.133-139, 2021/09. DOI:10.1587/bplus.15.133