2024年2月3日の第155回月例発表会において,辰己 弘征(B4),東 葵(B4),梅田 寛斗(B4),岩井 駿人(B4),田中 誠也(B4),松本 翔汰(B4),田牧 浩月(B4),髙田 陽輝(B4)の8名が以下のタイトルで発表を行いました.
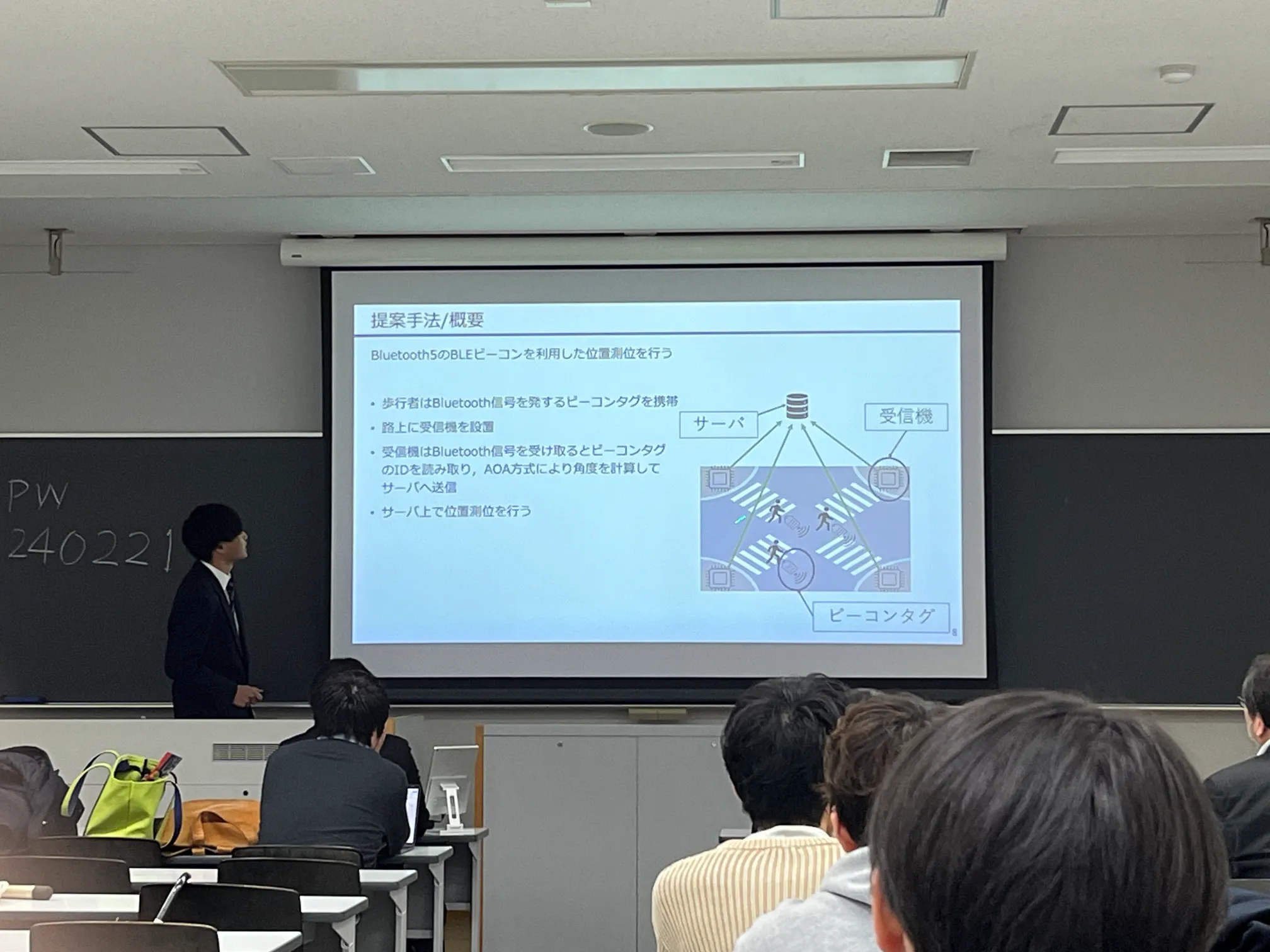
Bluetooth5 の AOA 方式を用いた複数の歩行者に対する位置測位の評価(辰己 弘征)
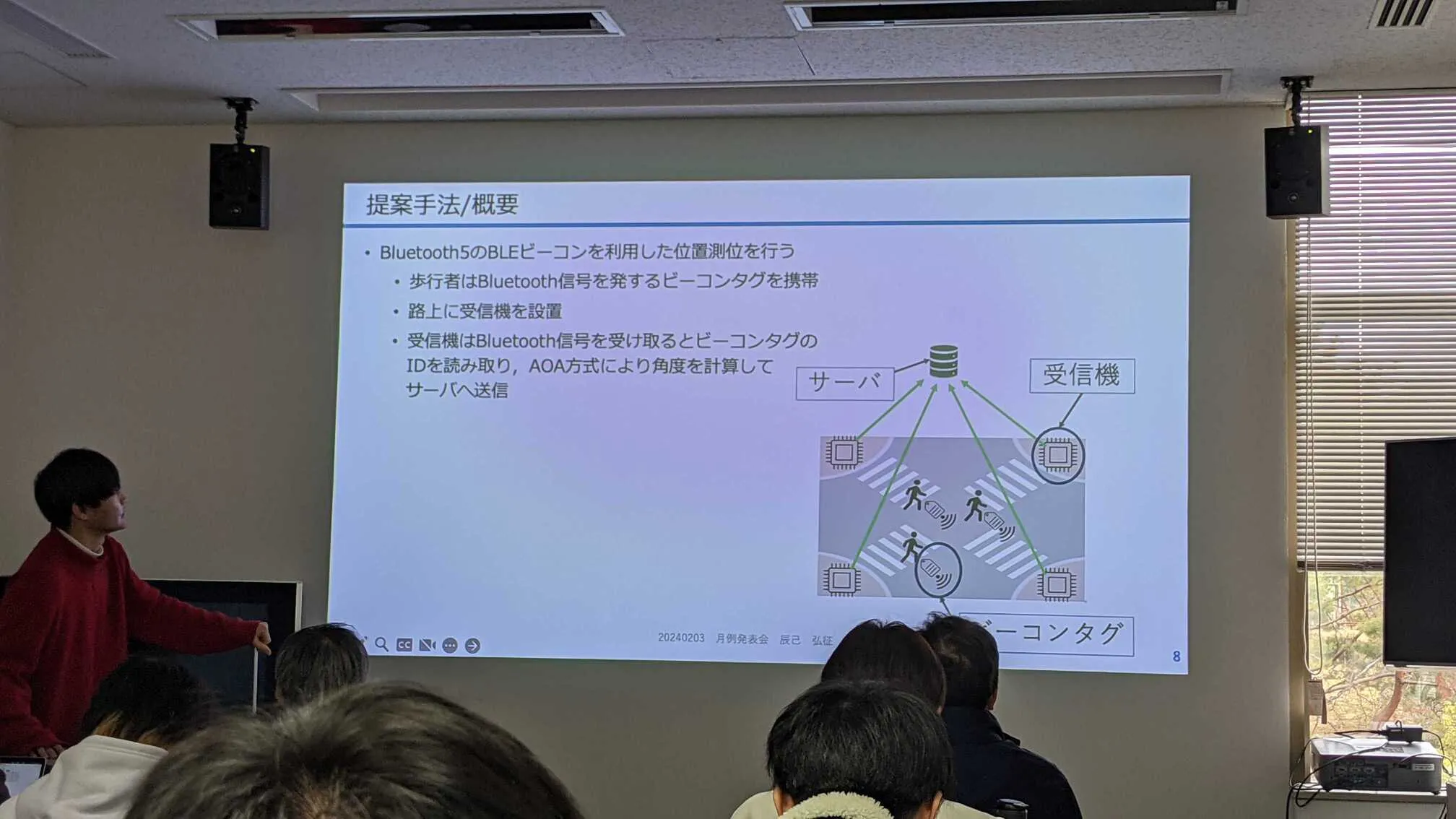
歩行者の急な飛び出しは,車両のドライバが歩行者を認識した際にはすでに回避が難しいということがほとんどであり,人身事故や死亡事故につながることが多い.これは,車両のドライバが歩行者の急な飛び出しを予測できないことが大きな要因である.こうした事故を減らすために歩行 者の動きを予測する方法として,レーザー光を照射し,その反射光を元に対象物の形や対象物までの距離を計測するLiDARやカメラなどのセンサを用いて歩行者を追跡する研究が行われている.歩行者を追跡した結果,歩行者の 現在の位置と進行方向を把握できればその後の動きの予測 が容易になると考えられる.しかし,複数の歩行者が重なった場合や密集した場合は,センサから近い歩行者によってその奥にいる歩行者が遮られるという理由で,歩行者の位置や人数が求められず,複数の歩行者が重ならない場合と比べて追跡性能が低くなってしまう.したがって,歩行者の追跡性能を向上させ,歩行者の急な飛び出しを予測するために,複数の歩行者による死角や密集などに関わらず, 全ての歩行者の位置と人数を正確に求める方法が必要である.本研究では,BLEビーコンを搭載した,ビーコンタグ と受信機を用いて歩行者の位置と人数を求めた際の精度を評価する.
移動環境下における利用者のコンテンツを考慮したマルチパス QUIC パケットスケジューラ(東 葵)
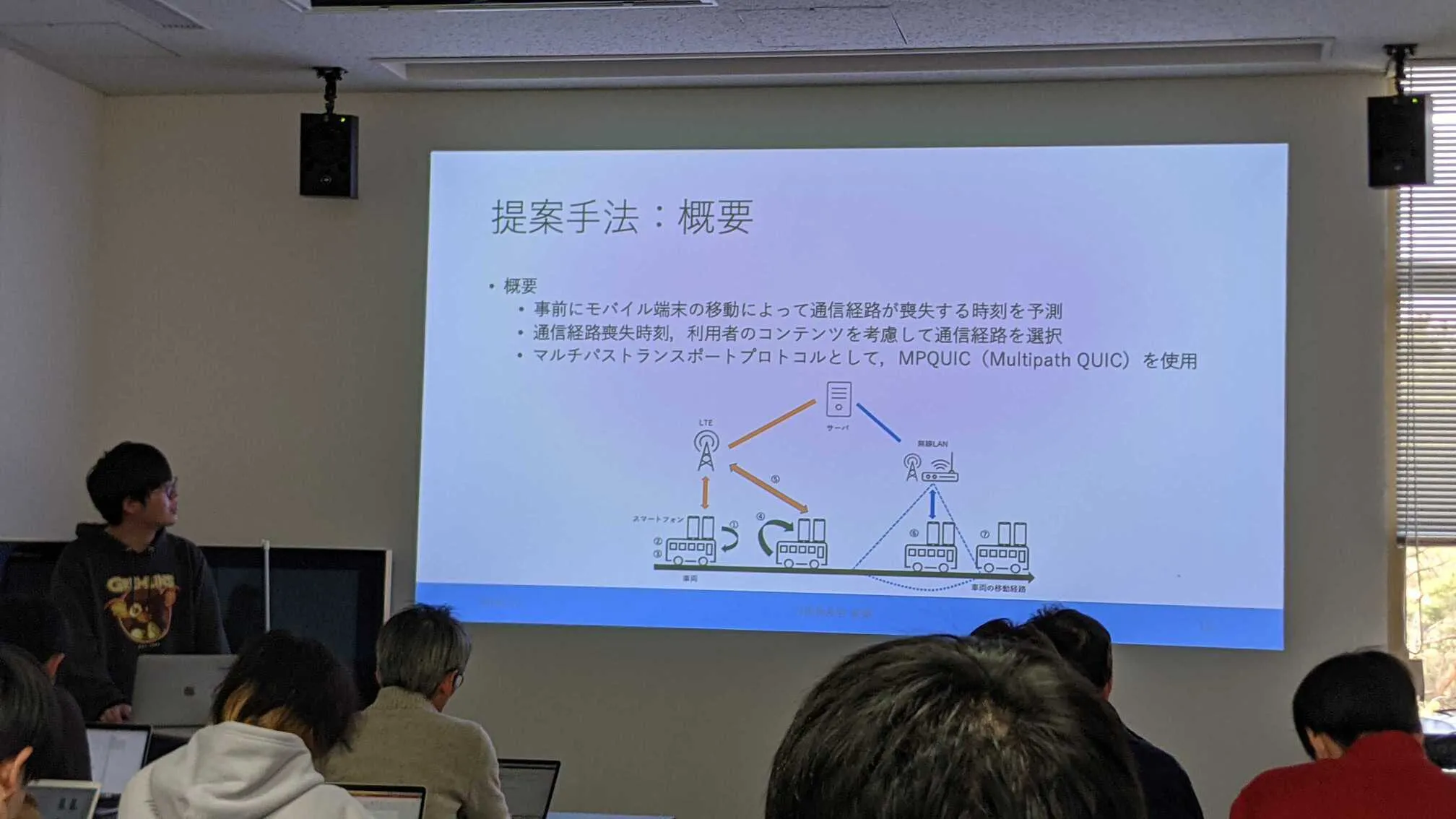
近年,スマートフォンなどのモバイル端末の普及により,公共交通機関や自家用車での移動中にビデオストリーミングなどのコンテンツを利用する機会が増えている.これらのコンテンツを快適に利用するためには,パケットロスや通信の遅延などが発生しないように,通信帯域を確保することが必要となる.そこで,LTEなどのセルラー通信と無線LANといった複数の通信を同時に使用することが可能なマルチパストランスポートプロトコルという技術が用いられている.マルチパストランスポートプロトコルは,パケットスケジューラによってパケットがどの通信経路へ送信されるか決定される.しかし,既存のパケットスケジューラはモバイル端末の移動による通信経路の喪失を考慮していない.そのため,移動による通信経路の損失によってネットワーク上を伝送中のパケットであるInFlightパケットがモバイル端末に到達できず,パケットロスが発生する.また,利用者のコンテンツも考慮されておらず,通信経路の最適化が不十分である.そこで本研究では,移動経路,利用者のコンテンツに基づいて通信経路を選択することで,移動環境,利用者のコンテンツに応じた通信経路選択を可能とし,InFlightパケットによるパケットロスを削減する手法を提案する.
時空間グリッド予約における車線変更を考慮した道路合流調停手法の検討(梅田 寛斗)
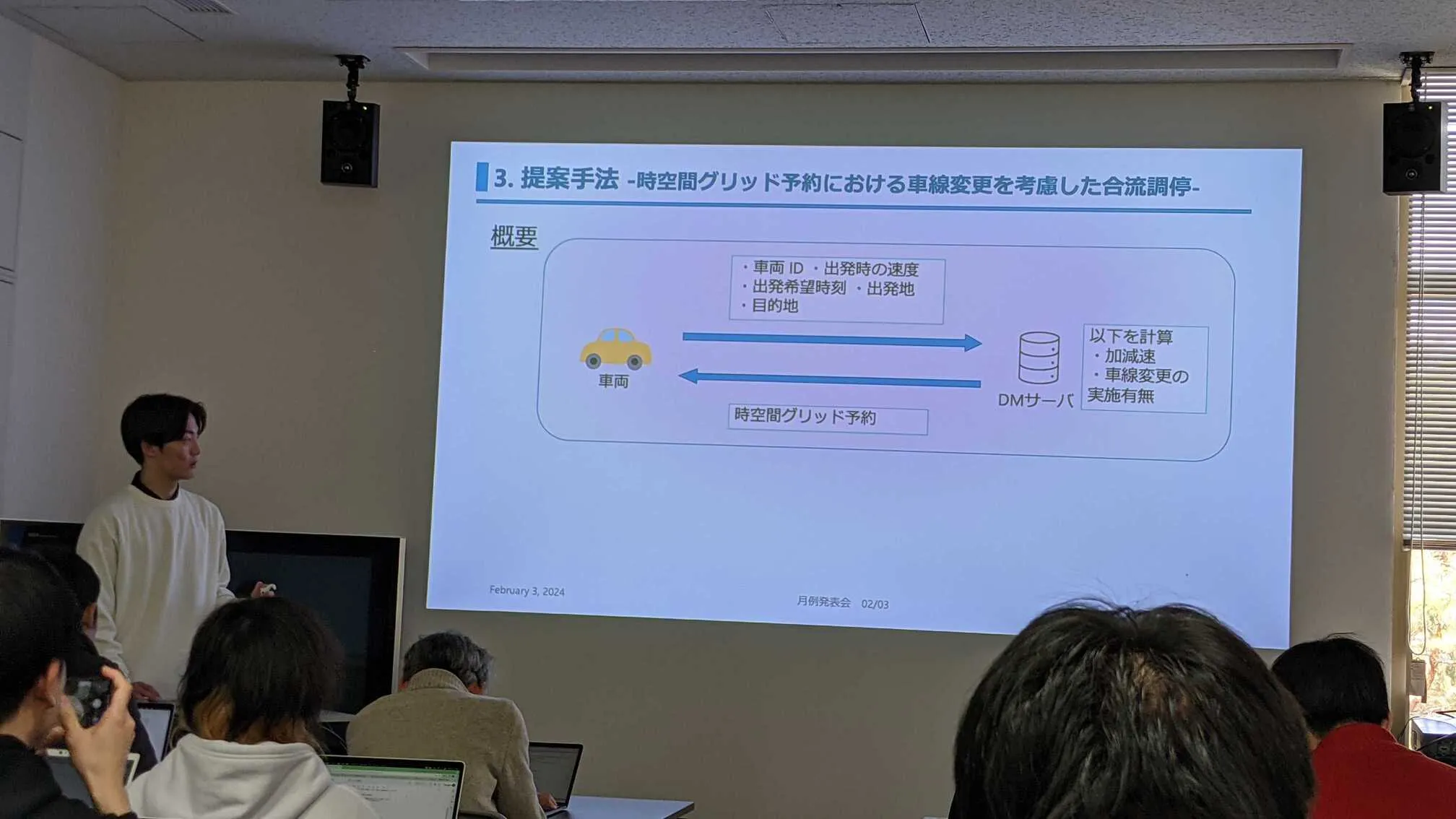
自動運転技術に関する研究において,通信を用いて車載センサ情報を他車両と共有して走行する協調型自動運転が検討されている.協調型自動運転における走行調停手法として,ダイナミックマップを利用し,道路上の空間および時間を分割した時空間グリッドの予約による方式が提案されている.高速道路における走行調停においてこの手法を適用した先行研究では,合流時の車両の加減速が緩やかになり,安全性や走行効率が向上することを示した.しかし,この研究では高速道路の本線での車線変更について考慮していない.そこで本研究では,より効率的で安全な高速道路の合流調停を目的とし,高速道路の本線における車線変更を考慮した走行調停の手法を提案する.
ぷよぷよテトリスにおけるゲーム AI アルゴリズムの比較(岩井 駿人)
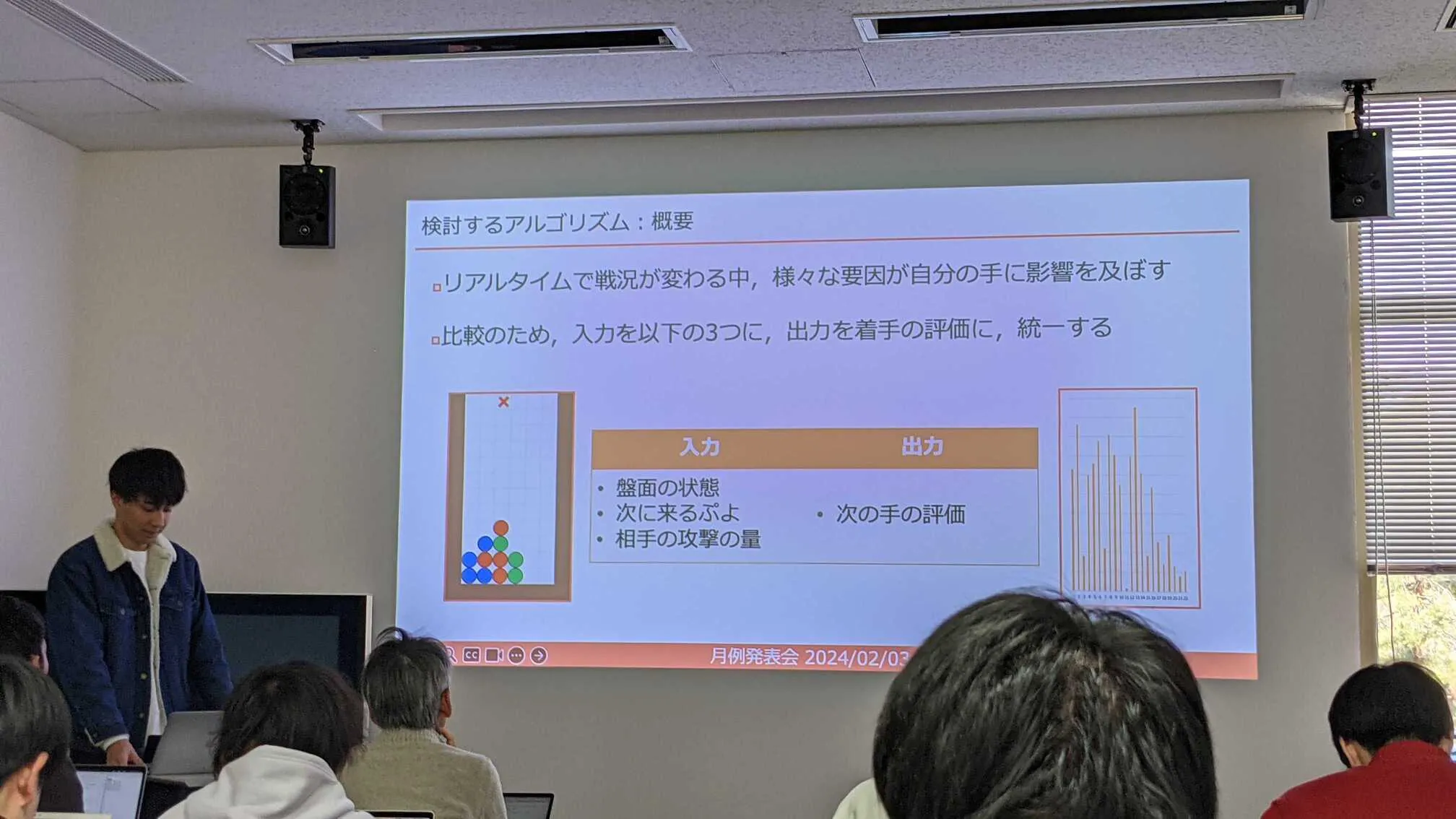
近年の人工知能(AI)の進化によって,様々なゲームにおいて人間のコンピュータゲームプレイヤーよりも好成績を出すゲームAIが開発され,その一例として,ZetrisやColdClearなどのテトリスのゲームAIが挙げられる.これらのテトリスのゲームAIはテトリスのプロを圧倒的に凌駕する強さを実現しており,ぷよぷよテトリスというゲームを起点にその実力が注目されるようになった.ぷよぷよテトリスは,ぷよぷよとテトリスの二つのパズルゲームを組み合わせたゲームで,プレイヤーはそれぞれ得意なゲームを選択して対戦することができる.ぷよぷよに対してパズルゲームで有用性が示されているアルゴリズムを適用した関連研究は存在する.しかし,それらのアルゴリズム同士の比較やテトリス相手に対する有用性を示した研究はない.そこで本研究では,ゲームAIで扱われる複数のアルゴリズムをテトリス相手のぷよぷよに適用し,アルゴリズムの有用性を比較することを目的とする.
ホームネットワークにおけるコンテナオーケストレーションによるIoT 機器機能拡張フレームワークの提案(田中 誠也)
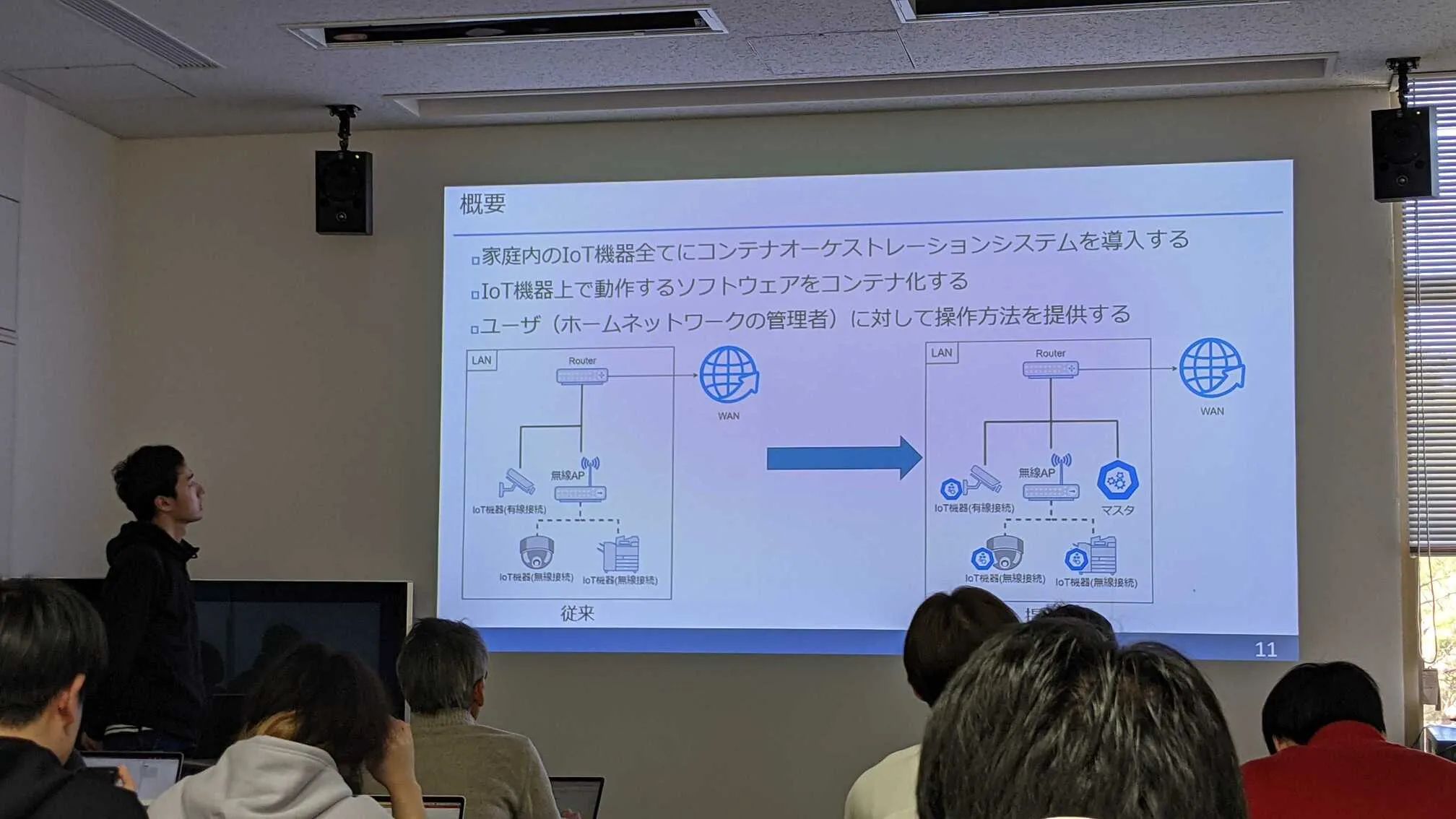
近年,一般家庭においてIoT(Internet of Things)機器の普及が進んでいる.特に,家電製品のIoT機器化が進んだことにより,家庭内に構築したLAN環境であるホームネットワーク内のIoT機器が増加している.IoT機器はエアコンの切り忘れ防止等の日常的な動作を補助するための製品から冷蔵庫等の家電まで,多様な製品が販売されている.そのため,製品種別毎にメーカは異なることが多く,ホームネットワーク内には様々なメーカのIoT機器が混在する.IoT機器は発売後もメーカから,ソフトウェアアップデートや機能追加による機能拡張が行われている.しかし,IoT機器の機能拡張にはユーザの操作が必要である.IoT機器メーカは機能拡張の方法をそれぞれが独自に提供しているため,家庭内のIoT機器の種類が増加すれば,機能拡張におけるユーザの煩雑さは増す.
協調型自動運転における通信遅延を考慮した安全性のシミュレーション評価(松本 翔汰)
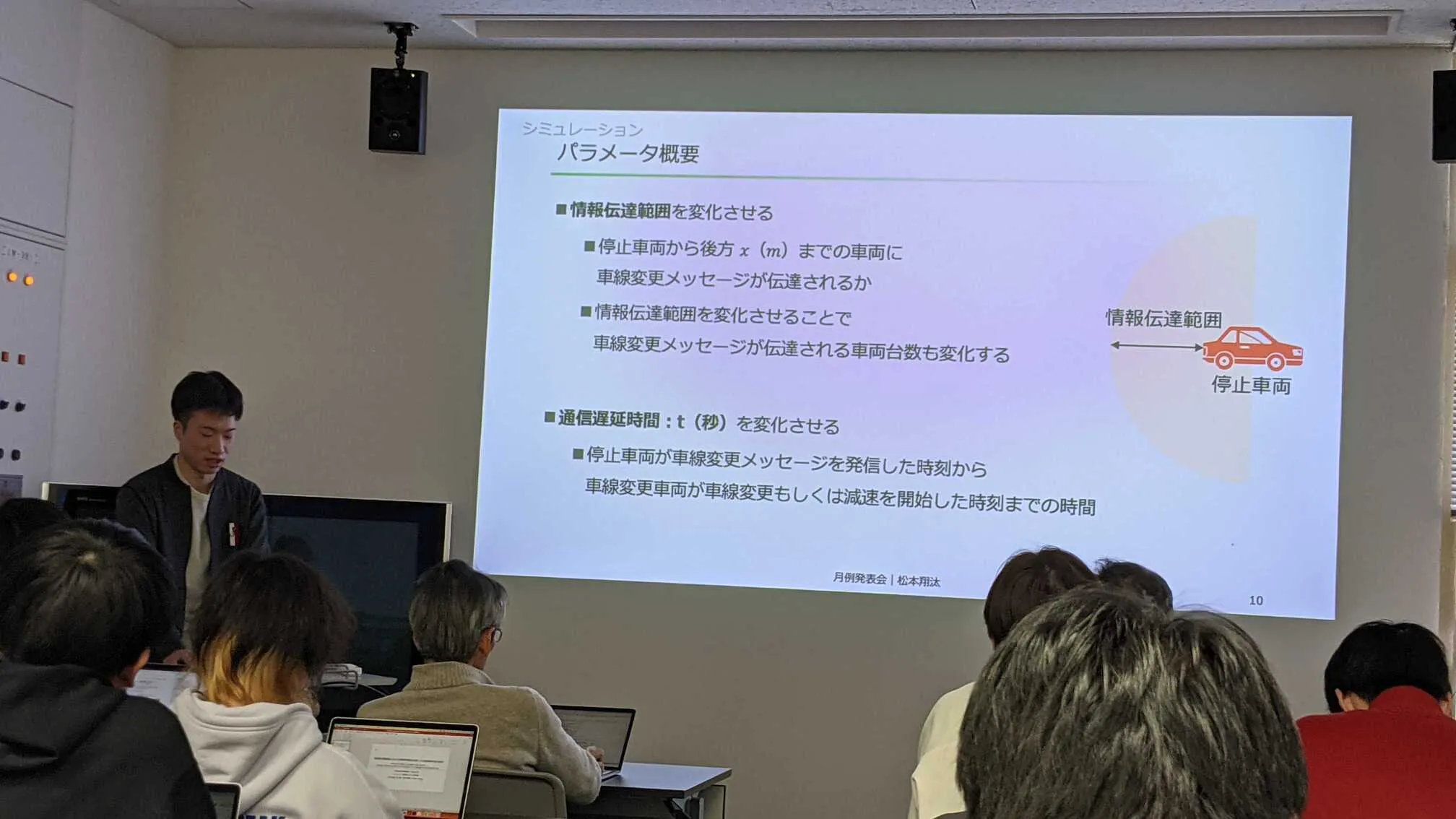
近年,自動運転に関する研究が盛んに行われている.これまでであれば,ドライバーに対して運転支援という形で自動ブレーキやレーンキープアシストなどの技術が開発され,普及が進み事故件数も低下している.さらに安全な車社会の実現のために,協調型自動運転の研究も進んでいる.協調型自動運転では,他車両や道路インフラ等と通信を行うことで,道路環境情報を得ることができる.すなわち自律型自動運転の場合と比較して道路環境における動的情報量が多く,より安全な運転行動が可能である.走行調停を行う際に,V2V(Vehicle-to-Vehicle)通信を用いるとき,車両台数が少ない場合は車両同士の直接的な通信が可能なため,早い情報の送受信が可能になる.しかしながら,車両台数が増加した場合は,計算量の増加が見込まれ,計算量の増加は通信遅延の原因となりうる.V2I(Vehicle-to-Infrastructure)通信を行い走行調停をする際は,サーバを活用するため,交通管理などの面で効率的な通信が可能になるが,伝送距離がV2V通信の場合と比較して長くなるため,通信遅延発生確率が高くなる.そのため,通信遅延時間を考慮した情報伝達範囲の調整等が必要である.
ネットワーク仮想化を用いた経路選択による車両間の通信品質向上(田牧 浩月)
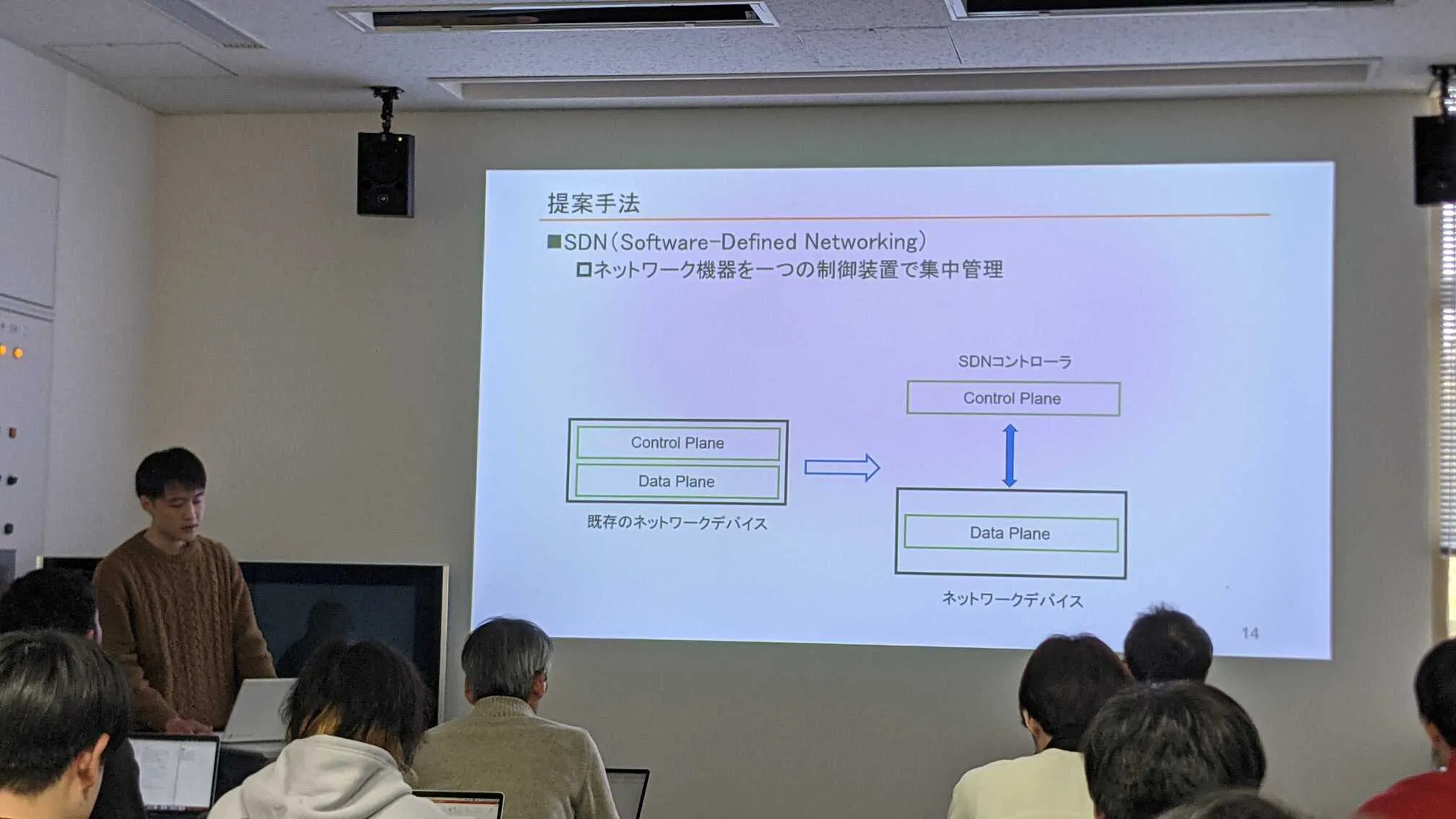
近年,ITS(高度道路交通システム)において,コネクテッドカーのための通信ネットワークに関する研究が活発に行われている.通信ネットワークにおいて車両間の通信に着目すると,見通しの悪い交差点などでは、車両同士が無線通信を通じて情報を共有することで安全性の向上が期待されている.このようなユースケースにおいて,車両走行中に突発的な危険事象に遭遇した際には,検知した情報を低遅延かつ高信頼で他車両に届ける必要がある.そこで,車両間で情報を交換するための主要な通信技術として,車車間直接通信であるV2V(Vehicle-to-Vehicle)通信と基地局経由の車車間通信であるV2N2V(Vehicle-to-Networkto-Vehicle)通信が注目されている.V2V通信は,車両間の距離が近い場合は直接伝送による低遅延な通信が可能である.しかし,車両間の距離が離れている状況では,中間車両を介したマルチホップ通信が行われるため,通信する車両同士が遠くなるにつれて中継する車両台数が増加し,通信遅延時間が大きくなる問題がある.一方で,V2N2V通信では広域なエリアで通信を行うことが可能である.しかし,車両間の距離が近い場合においても基地局を介した通信を行うため,V2V通信と比較して通信遅延時間が大きくなる問題がある.そこで本研究では,ネットワーク仮想化技術であるSDN(Software-DefinedNetworking)を利用し,車車間通信を行う際にV2V通信とV2N2V通信を動的に切り替えることで通信品質の向上を検討する.
協調型自動運転における車車間通信を利用した合流調停手法の検討(髙田 陽輝)
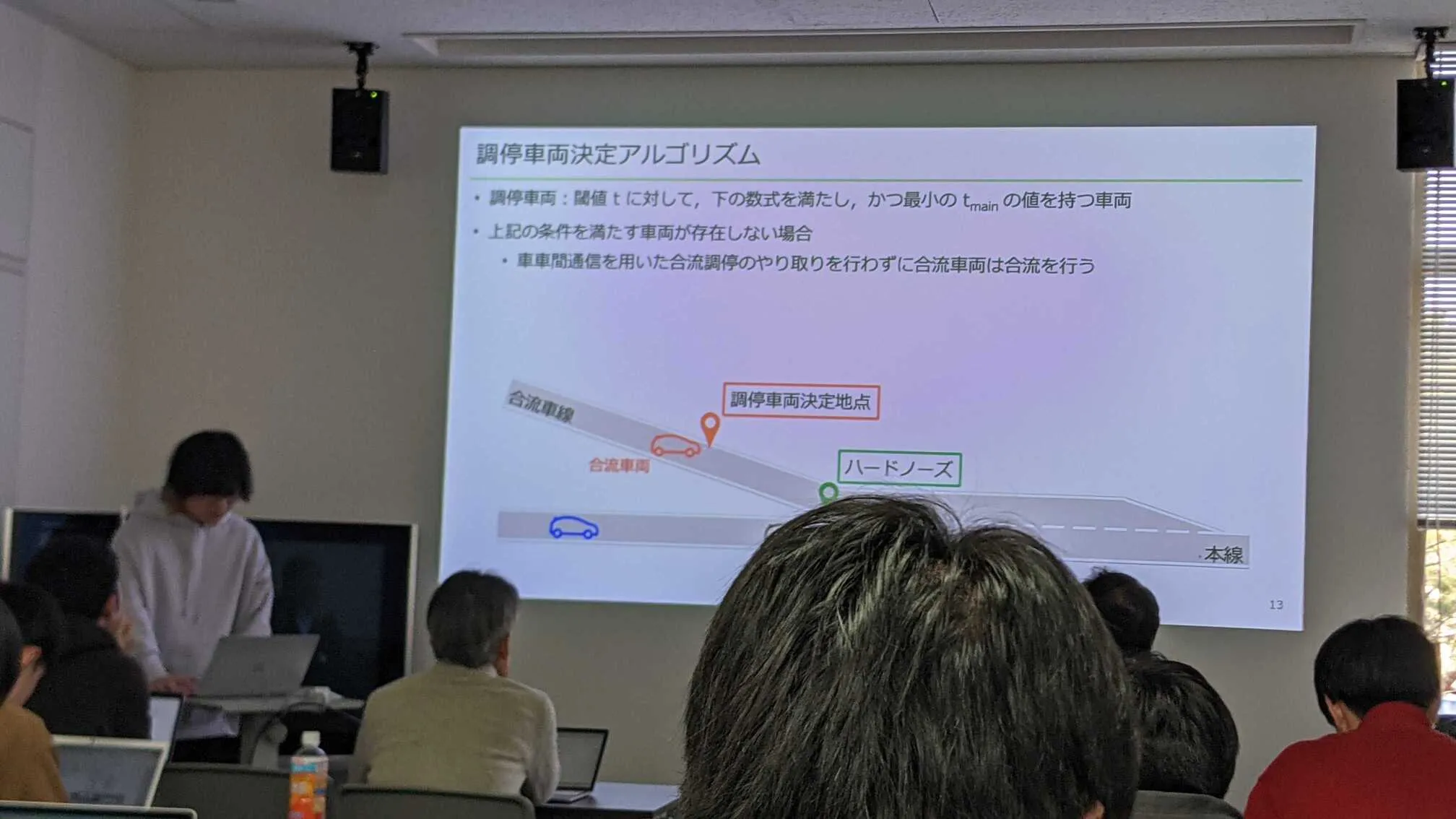
近年,交通事故の防止や渋滞の緩和のために自動運転に関する技術が急速に発展しており,完全運転自動化に向けて協調型自動運転に関する研究が盛んに行われている.協調型自動運転とは,車両が,他の車両との通信である車車間通信や,路側機との通信である路車間通信によって,自身の位置や速度などをリアルタイムで共有することで,他の車両の動きや意図を把握した,より円滑かつ安全な運転を可能とする技術である.協調型自動運転のユースケースの1つに,合流部での車両の円滑かつ安全な合流を目的とする合流調停があり,合流調停手法として路車間通信を利用した手法が検討されている.路車間通信によって容易に調停する車両を決定することが可能となるが,路車間通信をするためには路側機を合流部に設置する必要がある.しかし,日本全国の高速道路やバイパス,一般道上において,合流部は膨大な数が存在しており,これらすべてに路側機を設置するには,膨大な費用を要する.ゆえに,路車間通信を利用した手法はコスト面の理由から難しく,車車間通信のみを利用した合流調停手法が必要である.本研究では,本線車両1車線,加速車線1車線の高速道路の合流部に着目し,車車間通信のみを利用した合流調停手法の通信内容,ならびに通信手順を提案する.合流部において,提案した合流調停手法を実施した際の車両の挙動を検証するために,旅行時間に着目した交通の円滑性の評価と,急減速に着目した安全性の評価を行う.