2024年8月21日の第160回月例発表会において,井若 勇志(B4),富成 泰生(B4),藤原 直己(B4),野田 虎之介(B4),松浦 薫(B4),森 梓恩(B4)の6名が以下のタイトルで発表を行いました.
時空間グリッド予約における空間効率を考慮した自動バレー駐車制御方式の提案(井若 勇志)
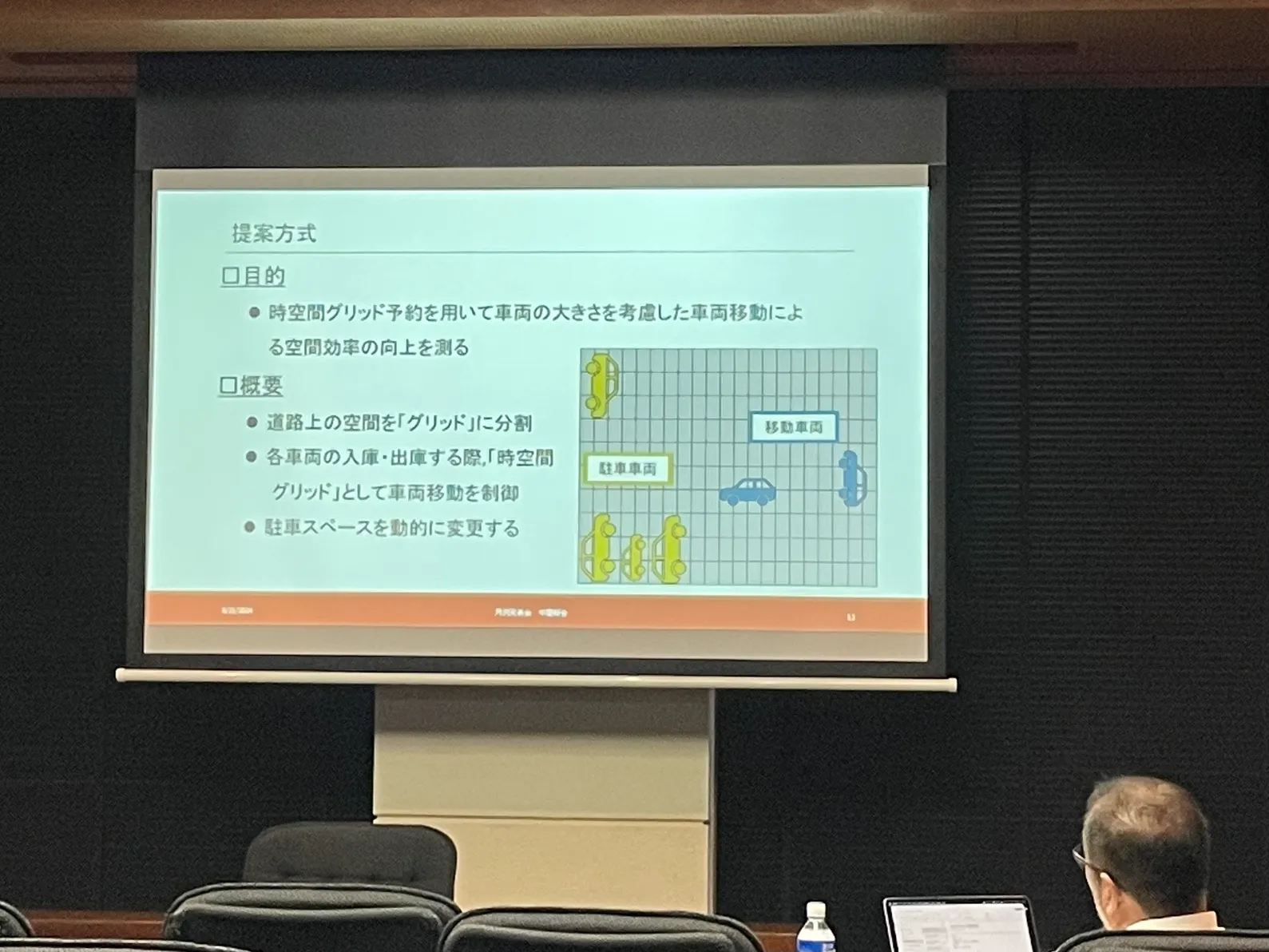
近年, 搭乗者の乗降場所から駐車場内の駐車スペースに車両を自動で駐車し,必要な時に駐車スペースから乗降場所まで自動で車両を呼び出すことができる自動バレー駐車に関する研究が行われている.ドイツのシュトゥットガルトでは, 無人かつ自動で駐車できる自動バレー駐車がドイツ連邦自動車局に承認され, 世界でも期待されている.複数の車両が自動バレー駐車を効率的に行うためには,各車両で走行を調停する必要がある.そこで, ダイナミックマップにおける時空間グリッド予約を利用した自動バレー駐車が検討されている. この手法を適用することで, 従来の手法と比較して待ち時間が削減され, 駐車場の回転効率が向上することを示した. 本研究では, 先行研究の課題である車両の大小に着目する. グリッドを細かく割り当て, 自動バレー駐車の利点であるドアの開閉スペースを設けないという特性を活かす. そして, ダイナミックマップを利用した時空間グリッド予約における駐車スペースを動的に確保し, 複数の車両の大小を考慮した車両移動の駐車スペース効率化する方式を提案する.
歩行情報を用いた LiDAR とスマートフォンによる個人特定方法の提案(富成 泰生)
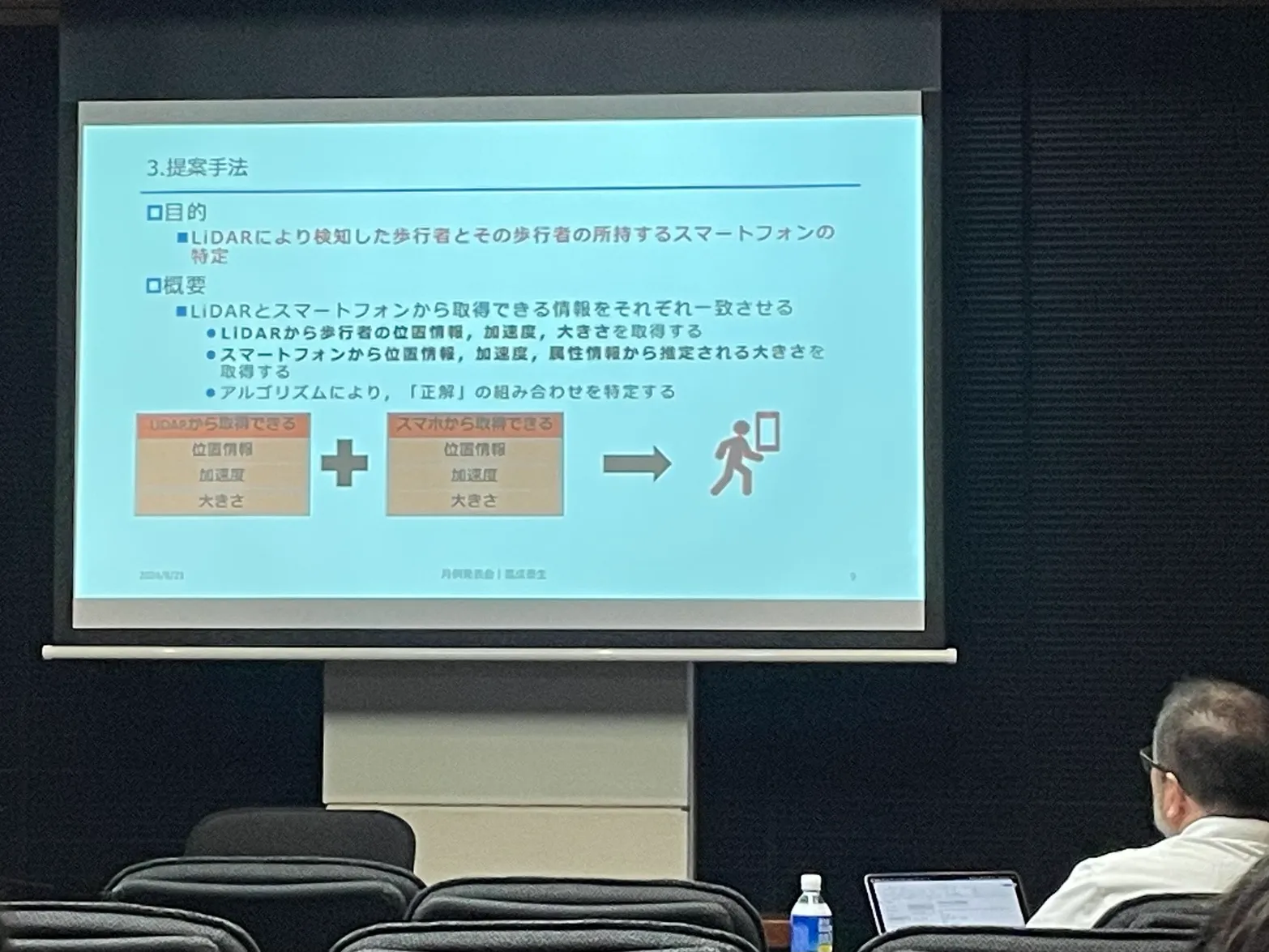
近年,交通事故の発生件数や死傷者数は年々減少傾向である.しかしながら,依然として歩行中の交通事故における重傷者数は 6,800 件に達しており,衝突事故防止技術のさらなる高度化が求められている.そのため,LiDARやカメラを用いた歩行者特定の研究は進んでいるが,歩行者への直接的な警告は難しい.車両だけでなく,歩行者にも警告を提供することにより,交通事故の軽減が期待できる.歩行者の情報を検知する手段としては,LiDAR とスマートフォンの GPS が挙げられる.LiDAR は検出範囲内で高精度に歩行者の位置を特定できる.一方,スマートフォンの GPS には 5~10m の誤差があるものの,歩行者の属性情報や加速度などの歩行に関する情報を取得することが可能である.LiDAR から取得できる歩行者の大きさ,高精度の位置情報,加速度とスマートフォンから取得できる歩行者の属性情報,位置情報,加速度を組み合わせることで,歩行者とその歩行者の所持するスマートフォンを一致させ特定することが可能となり,歩行者への警告が実現できる.そこで本研究では,LiDAR とスマートフォンを統合的に利用し,歩行情報を用いた個人特定方法の検討を行う.
時空間ボクセル予約による複数ドローンの飛行調停制御(藤原 直己)
近年,物流業界では人手不足が深刻化しており,この問題を解決するために様々な新しい仕組みが検討されている.国土交通省の総合物流施策大綱において,ドローンを物流における重要な新技術の一つとして位置付けているように,ドローンは物流業界で注目されている.ドローンを実際に配送システムの一環として運用するなどドローンを複数飛行させる場合,ドローン同士が衝突する可能性を低下させるために衝突回避行動をとる必要がある.ドローンの衝突回避方法には,各々のドローンがセンサで障害物を検知し衝突を回避する方法や,ドローン同士が位置情報などの情報を通信することで衝突を回避する方法がある.しかし,ドローンの台数が増えると通信帯域がひっ迫することや,周辺環境が複雑化することによって衝突回避性能が低下する問題がある.また,実際にドローンが配送を行う環境は主に都市部などの建造物等の構造物が多数存在する環境である.そこで,ドローンの台数が増加しても衝突回避性能が低下せず,構造物が複雑に存在する環境に適合した手法として,本研究では飛行領域を格子化した時空間ボクセル予約による調停制御の手法を提案する.
車両の位置情報および交通量による処理負荷を考慮したエッジサーバの動的選択手法(野田 虎之介)
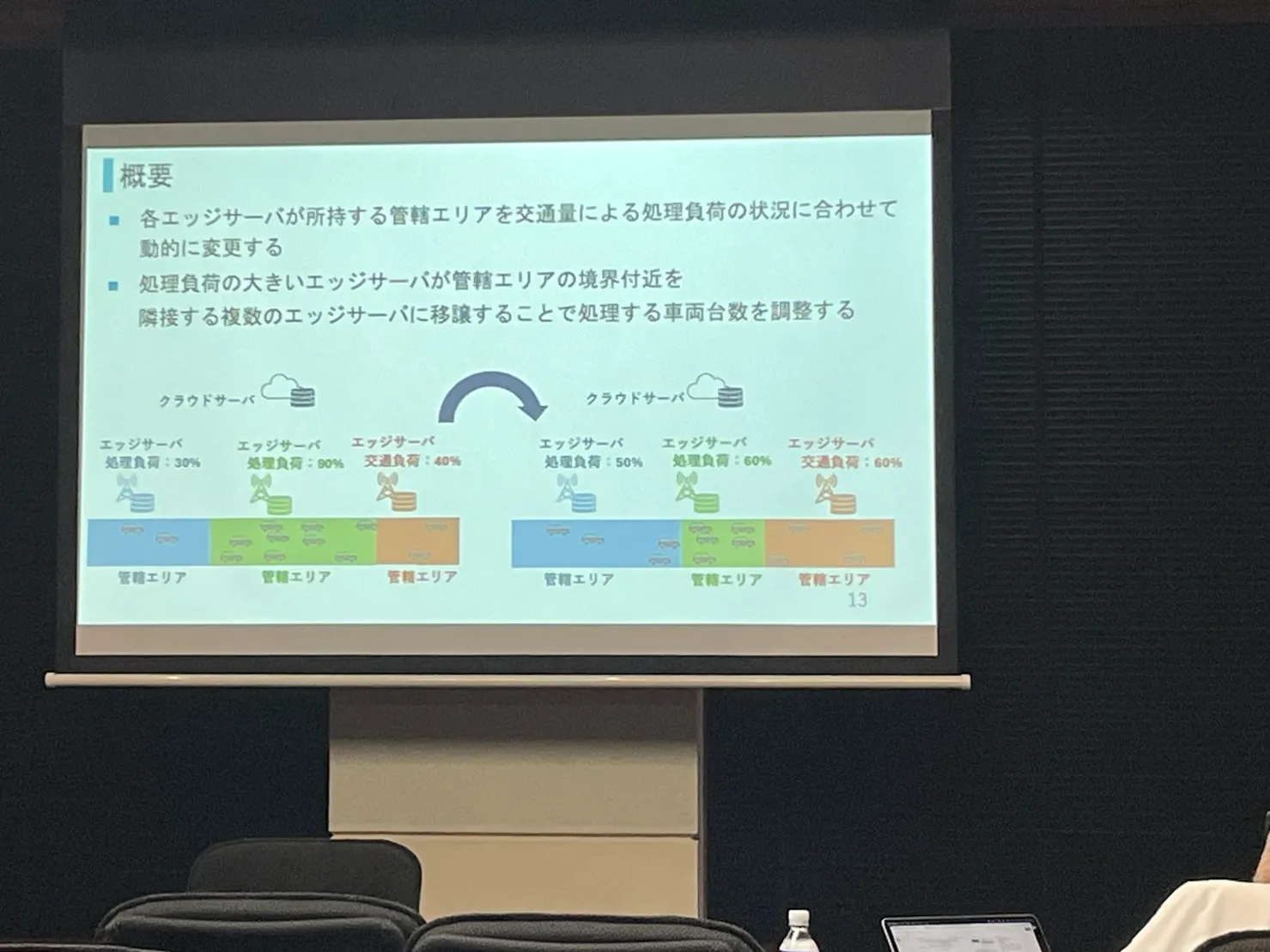
車両や路側センサから取得した動的な情報を高精度道路地図に重畳することが可能な情報通信プラットフォームであるダイナミックマップは,自動運転をはじめとする高度な交通サービスを支えるために必要不可欠な情報基盤である.従来のクラウドコンピューティングを基盤とする中央集約型ダイナミックマップシステムにおいては,大量のアクセスに伴う処理負荷の増大や通信遅延が問題とされてきた.これに対し,現在ではエッジサーバを地理的に分散配置し,各エッジサーバにおいて車両や路側センサからのデータを管理する分散型システムが研究開発されており,このアプローチにより処理負荷の分散および通信遅延の低減が期待されている.しかしながら,従来のエッジサーバを用いたダイナミックマップシステムにおいては,エッジサーバの計算資源が限られていることや,車両が位置している場所の地理的な情報が必要不可欠なために負荷分散が困難なシステム構造を有しているという課題が存在する.そのため,特定のエッジサーバにアクセスが集中した場合には,計算資源が不足し,交通安全に関わるサービスの提供に支障をきたすおそれがある.本研究では,特定のエッジサーバへのアクセスが増加した際に,そのエッジサーバが性能を維持できなくなる問題を解決するため,車両が集中し計算資源が逼迫しているエッジサーバの管轄エリアの一部を隣接するエッジサーバに移譲することによる負荷分散手法を提案する.
モバイル環境における Media over QUIC Transport での複数経路活用の検討(松浦 薫)
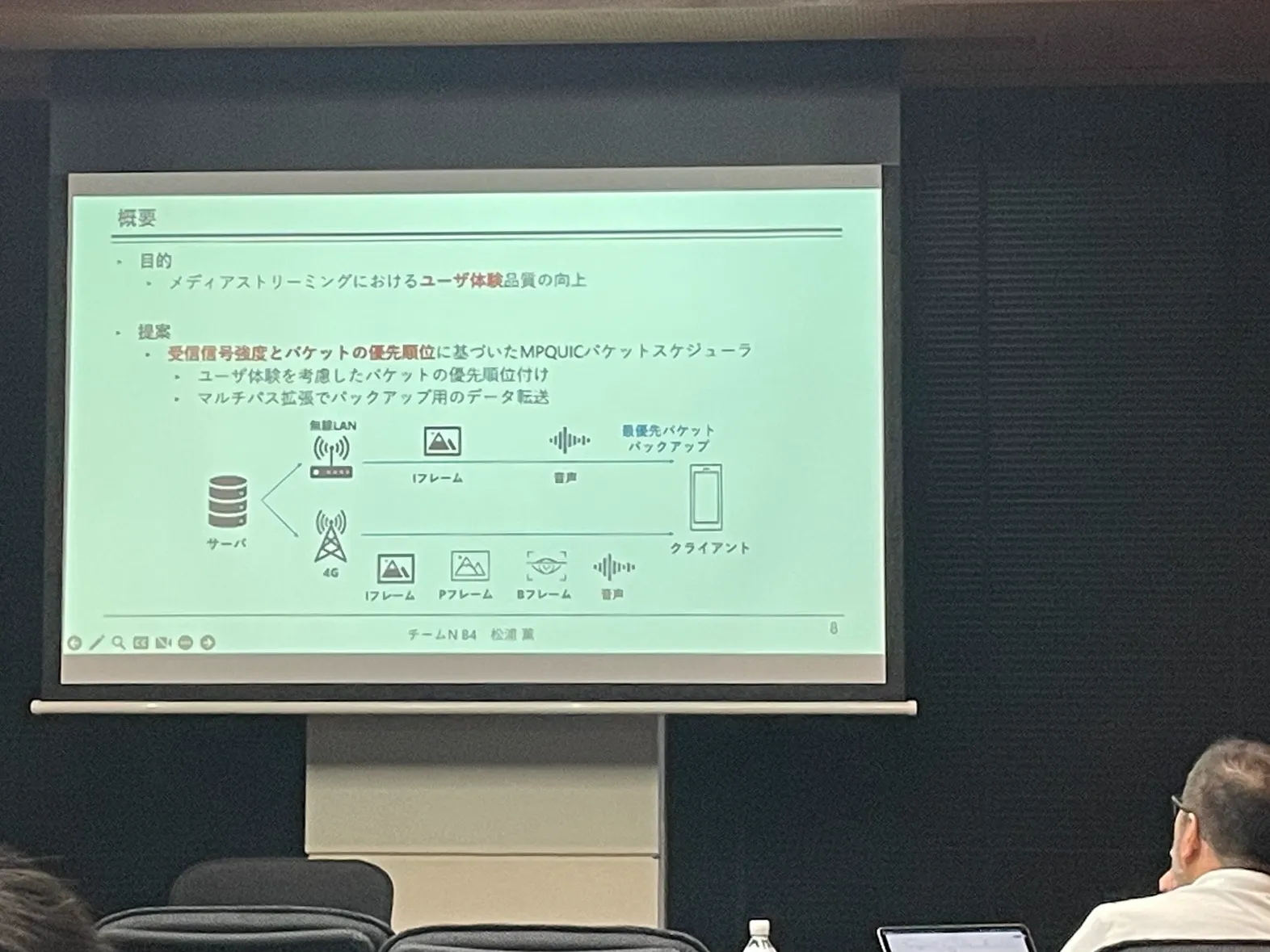
近年,インターネット上でメディアコンテンツの消費が活発に行われており,特に,スマートフォンなどのモバイル端末でのストリーミングサービスの利用が増加している.しかし,モバイル環境ではユーザの移動による通信経路の切り替えやデータパケットの通信遅延によるメディア視聴のユーザ体験品質の低下が課題として挙げられる.この課題に対して,4G/5G のセルラー回線と無線 LAN などの同時使用によるサーバ・クライアント間の接続の冗長化が有効だと考えられる.しかし,ストリーミング配信において複数の通信経路でパケットをどのように割り振るかは検討の余地がある.また,従来のストリーミングではトランスポートプロトコルに TCP を採用した HLS や DASH が主流であったが,TCP はコネクションの確立に時間がかかることに加え,パケットロスによって他のパケットの処理が遅延する Head of Line ブロッキングという問題点があった.これに対し,QUIC は未知サーバとは 1 回,既知サーバとは 0 回のやり取りでコネクションを確立でき,さらにパケットロスが他のパケットの処理に影響しない独自のストリーム形式を持つため注目されている.QUIC を用いたストリーミングでは,アプリケーションの要件に合わせて低遅延とスケーラビリティのトレードオフをシンプルに実現することが可能な Media over QUIC Transport(MoQT)が提案され,現在標準化に向けて議論が進められている.上記を踏まえ,本研究ではモバイル環境で複数経路を使ったデータ転送を MoQT 上で行い,クライアントの受信信号強度とパケットの優先度によって経路を選択するパケットスケジューラを提案する.そして,接続の冗長化によるパケットロス及び遅延の削減と,ユーザ体験品質を考慮したパケット割り振りによるストリーミング品質向上の効果を検討する.
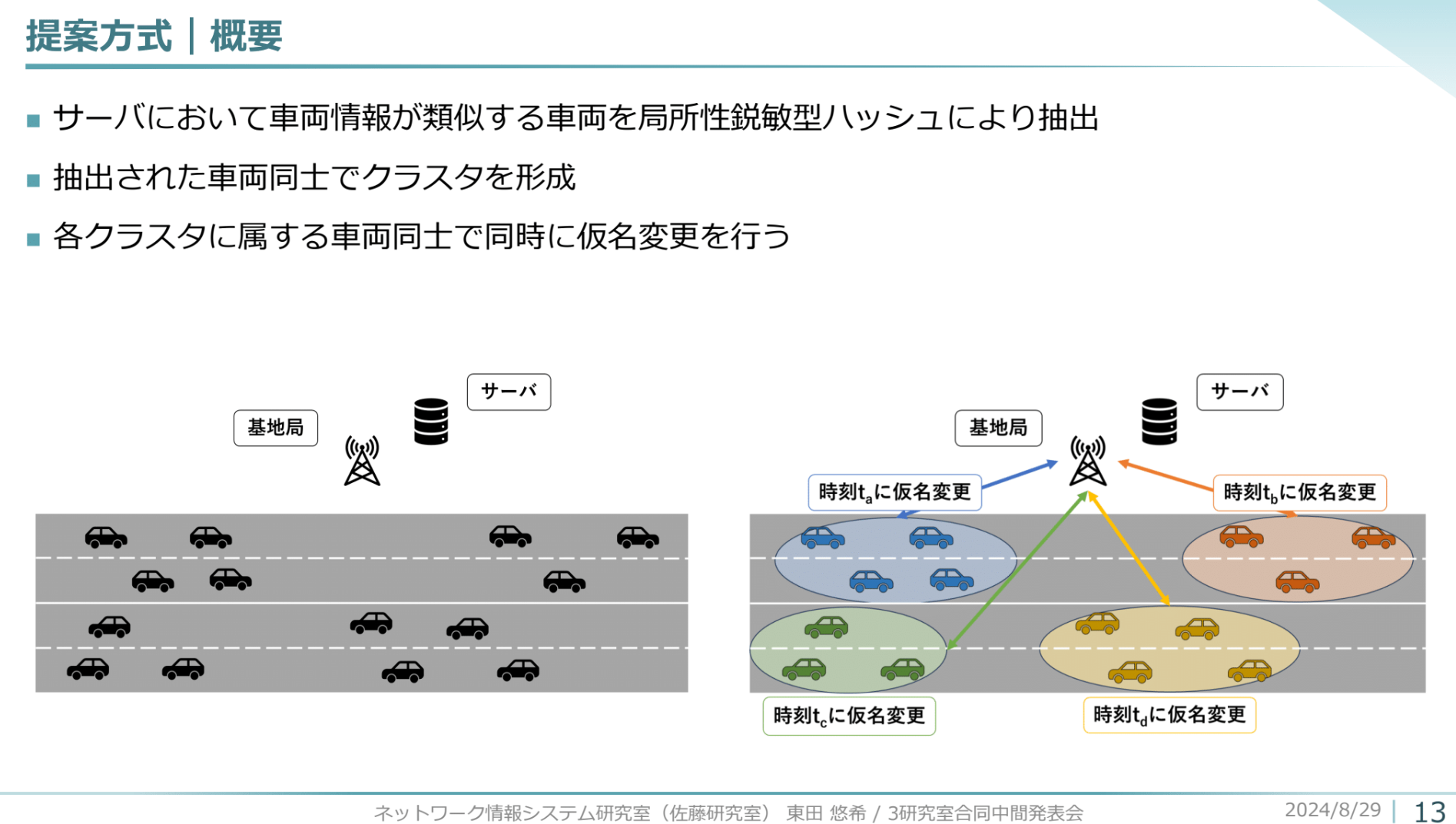
非通信車両と通信車両の混在環境における障害物回避のための通信車両制御手法の検討(森 梓恩)
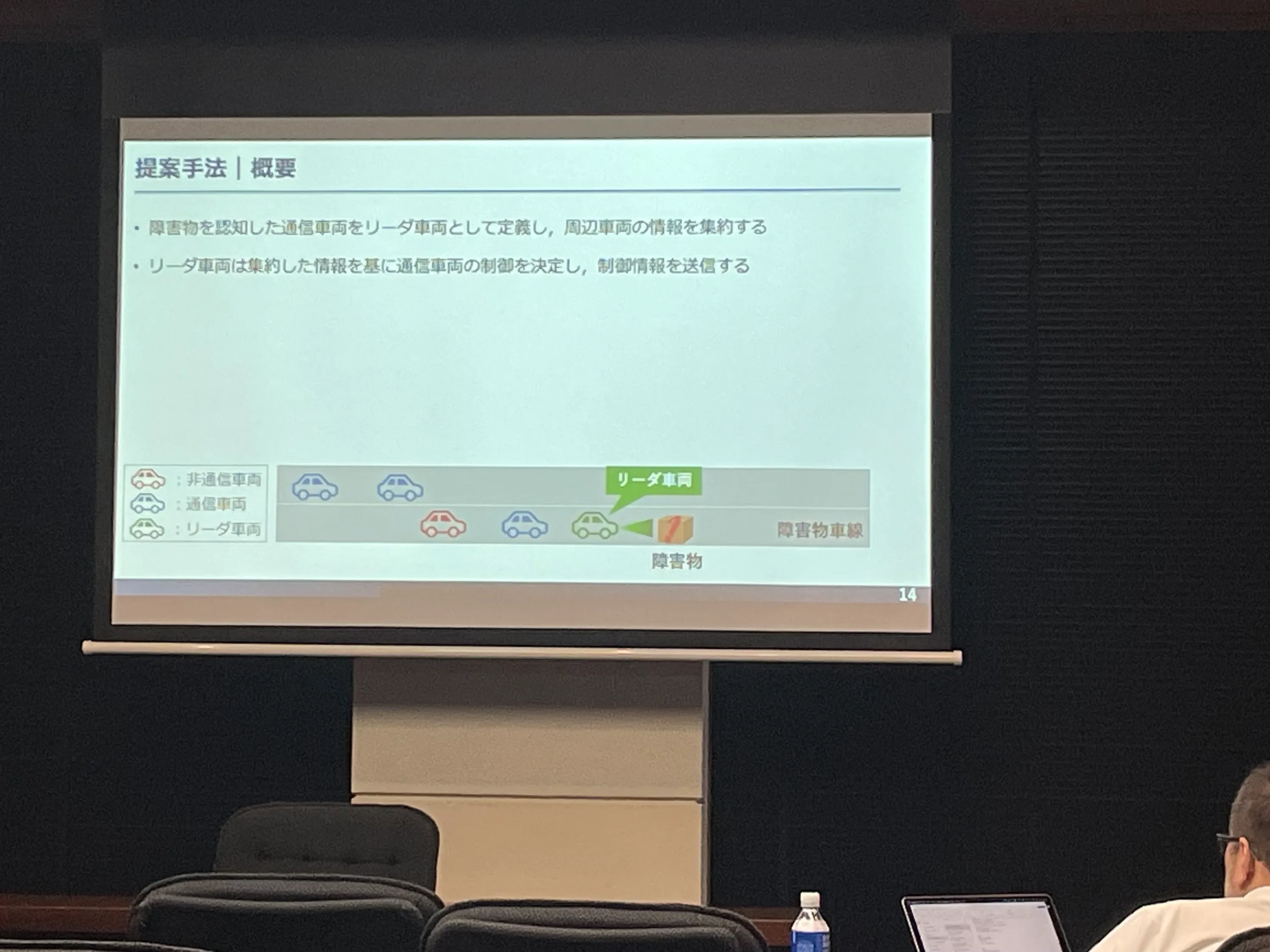
近年,通信機能を備えた通信車両同士が位置や速度などの走行情報や,通信車両に搭載されたセンサからのセンサ情報などを共有して,協調的に走行する協調型自動運転に関する研究が行われている.走行情報やセンサ情報の共有には,通信車両同士が通信を行う車車間通信や,道路周辺に設置された路側機と通信車両が通信を行う路車間通信などの通信方式が検討されている.路車間通信では,路側機の通信範囲内にある通信車両との直接通信を可能にし,合流地点や交差点のような複雑な交通環境における効率的な走行調停が期待されている.しかし,路側機のようなインフラを全国に設置するには莫大な予算が必要とされるため,合流部や交差点のような特定の地点を優先した必要最低限の設置が検討されている.障害物回避については,障害物は任意の場所に現れるため,路側機が設置されていない可能性がある.したがって路車間通信を用いたシステムでは,障害物回避のための全てのシナリオに対応することが困難である.障害物回避のためには,車車間通信を用いた通信車両の制御を検討する必要がある.また,通信車両が普及するまでの過渡期には,通信機能を持たない非通信車両が混在する環境が生じる.混在環境において非通信車両と通信車両は走行情報やセンサ情報を共有することができないため,非通信車両の挙動は通信車両の協調型自動運転の妨げになる.本研究では路側機の無い道路上に障害物が発生した場合の通信車両と非通信車両の混在環境を想定し,車車間通信を用いて混在環境における非通信車両を考慮した障害物回避のための通信車両の通信内容と制御手法を提案する.