2023年7月15日の第149回月例発表会において,山﨑 慎也(M1),松下 翔太(M1),松村 学(M1),東田 悠希(M1),佐々倉 瑛一(M1),坂本 拓馬(M1),黄一凡(M1)の7名が以下のタイトルで発表を行いました.
時空間グリッド予約による車両のセンサ情報共有手法(山﨑 慎也)
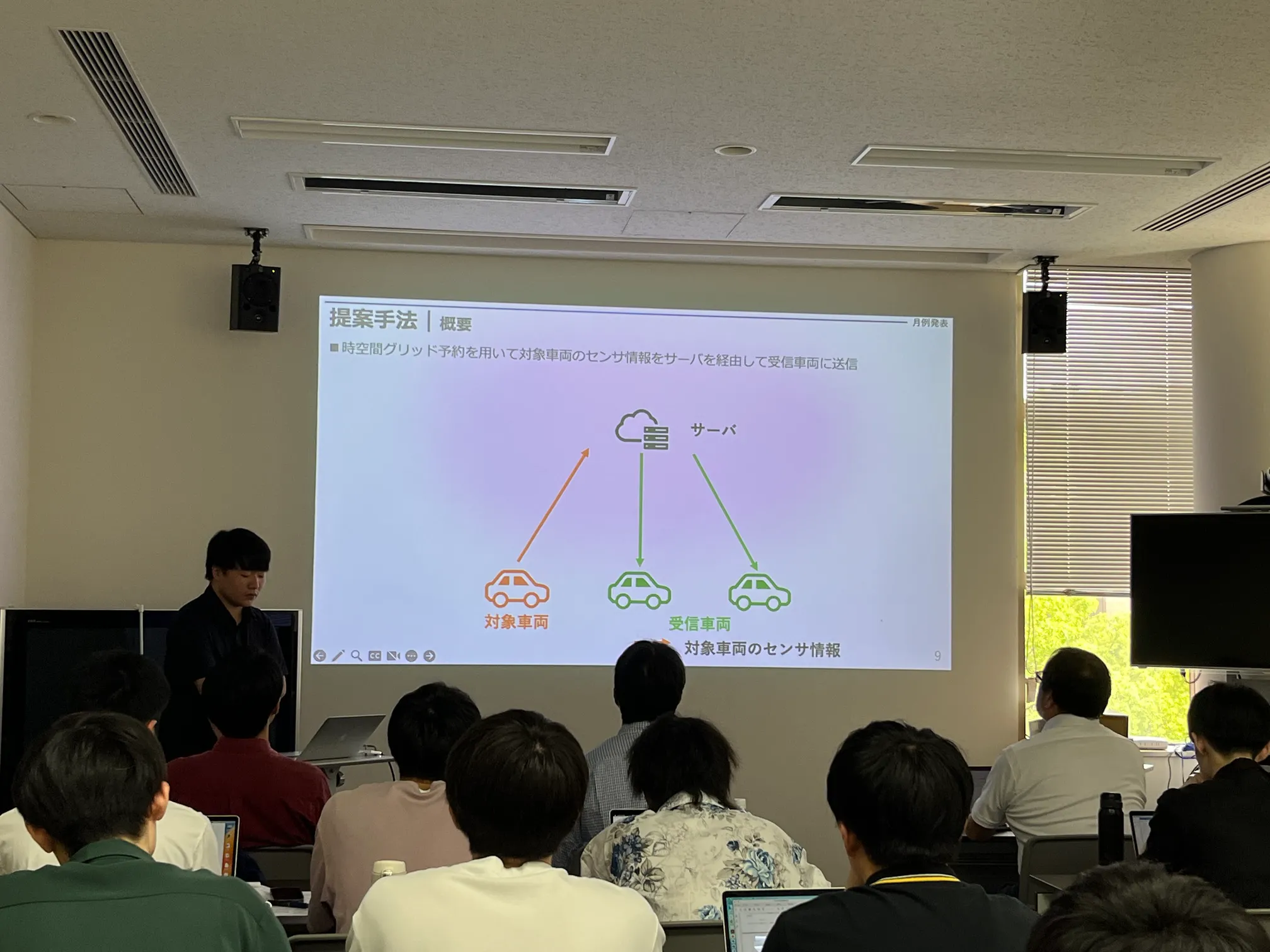
近年,自動車交通の安全と効率の向上のために,車両に搭載されたセンサを用いて周辺環境を認識し自律走行を行う自動運転車両の開発が行われている.しかし,1台の車両のみでの周辺環境の認識では,センサが検知できる範囲が限定的であるため,見通しの悪い交差点や物陰からの急な飛び出しに対して対応が困難であるという問題がある.このような問題に対して,V2V(Vehicle-to-Vehicle)通信を利用することで,車両がセンサで検知した車両や人などの周辺環境に関するセンサ情報を周辺車両とブロードキャスト通信し共有することで周辺環境の認識を向上させる研究が行われている.
しかし,V2V通信により多数の車両がセンサ情報をブロードキャスト通信することで,通信帯域が逼迫するという問題がある.通信帯域が逼迫することで車両が他に必要とする車両や人などの周辺環境に関するセンサ情報を受信できなくなる可能性があり,周辺環境の認識が低下し交通の安全性の低下に繋がる.
本研究では,車両の周辺環境の認識を向上させるために,車両の走行調停手法として提案されているダイナミックマップの時空間グリッド予約を用いることで,サーバが各車両の移動経路に基づいて各時刻において各車両が必要とするセンサ情報を通信する手法を提案する.
フリースペース認識におけるオブジェクト移動予測に基づくセンサフュージョンアルゴリズムの検討(松下 翔太)
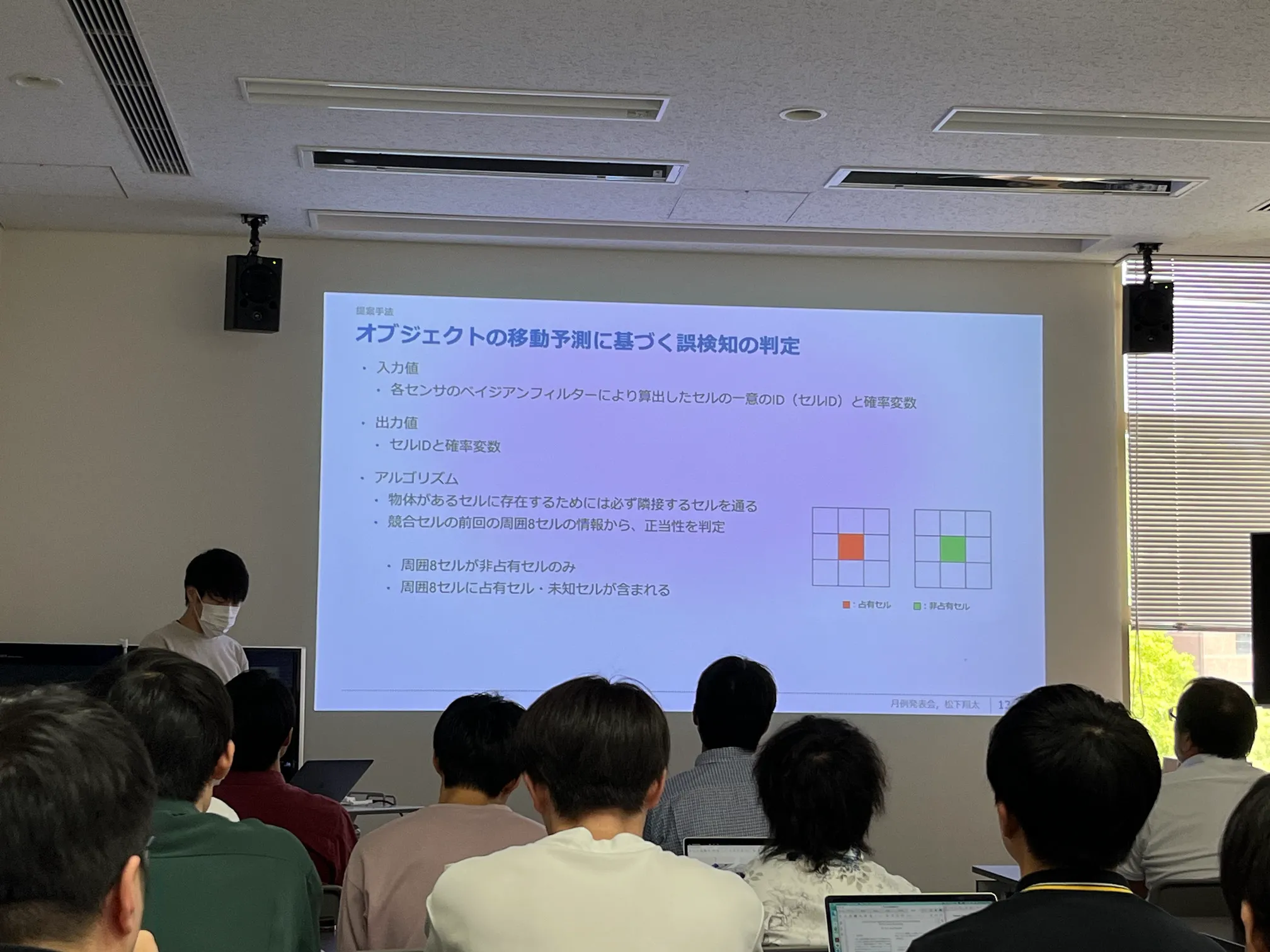
近年,自律型自動運転に通信を用いて得た情報を加えることで高度な自動運転を実現する協調型自動運転が注目されている.協調型自動運転では,車載センサや路側センサを統合することで,自車両からは死角となっている領域の歩行者や車両などのオブジェクトやフリースペースの認識が可能であり,より安全でかつ効率的な走行が可能である.フリースペースとは,車両の走行可能領域であり,歩行者や車両などのオブジェクトがないと判断された領域のことである.フリースペースを表現する手法として,OccupancyGridMap(OCM)がある.OCMは,領域を格子状に分割し,各格子(セル)に割り当てられた確率変数で占有・非占有を判定する地図のことであり,これを複数センサを組み合わせるセンサフュージョンに利用する.しかし,センサ情報が占有と非占有で競合した場合に,フリースペースかどうか判定することができないため,未知セルとなる.未知セルが多く生じると,正しく周辺環境を表現することができないため,走行の効率性が損なわれる.
そこで本研究では,未知セルを低減させ,正しくフリースペースを認識することを目的として,オブジェクトの移動予測とベイズ理論を組み合わせたセンサフュージョンアルゴリズムを提案する.
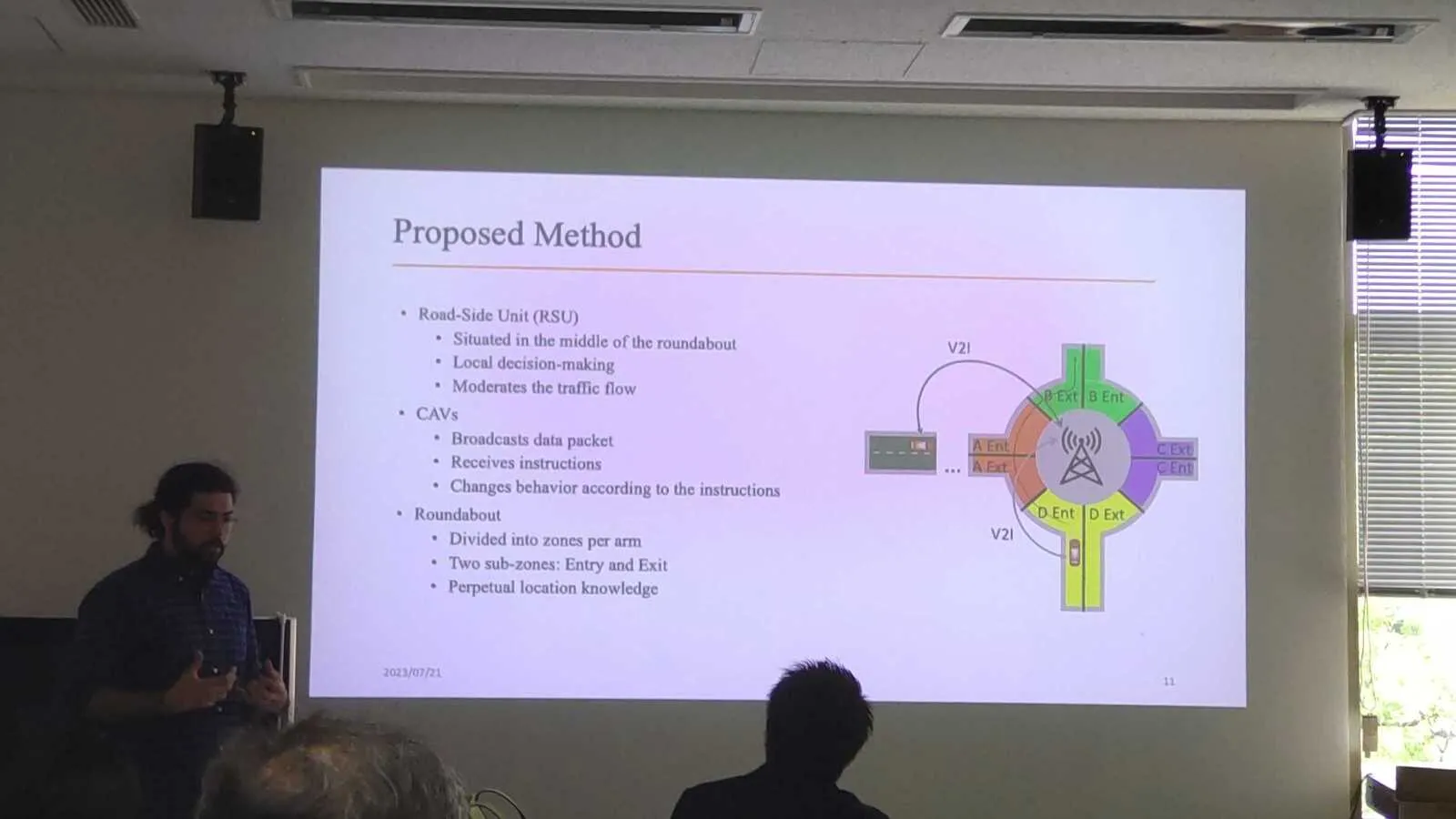
協調型自動運転車両の混在状況における時空間グリッド予約による道路合流調停手法(松村 学)

近年、協調型自動運転車両に関する研究が進められている.協調型自動運転では、V2V(Vehicle-to-Vehicle)通信やV2I(Vehicle-to-Infrastructure)通信を用いて,自車の情報を基に事前に走行経路を決定することで自動運転車同士が協調的に走行することが可能となる.
協調型自動運転の走行調停手法としてダイナミックマップによる時空間グリッド予約の利用が検討されている.時空間グリッド予約は,時間と道路空間を区切って作成したセルの集合体を時空間グリッドとして定義し,車両は走行したい時空間グリッドを事前に予約することで車両走行の調停をとる.
しかし,時空間グリッド予約による走行調停手法は全ての車両が自動運転車両であることを前提としている.自動運転車両の完全な普及は長期にわたることが想定されているため、通信機能を持たない従来車両を考慮した自動運転車両の制御手法の提案が必須である.本研究では,協調型自動運転車両と通信機能を持たない従来車両が混在する状況において、時空間グリッド予約による道路合流調停手法を提案する.手動運転車両の走行経路を予測した時空間グリッド予約を行うことで,混在状況における協調型自動運転車両の時空間グリッド予約を実現する.協調型自動運転車両を制御することで効率的かつ安全な合流調停を目指す.
V2X 通信における位置プライバシ保護のためのLSH を用いた類似車両抽出による仮名変更方式(東田 悠希)
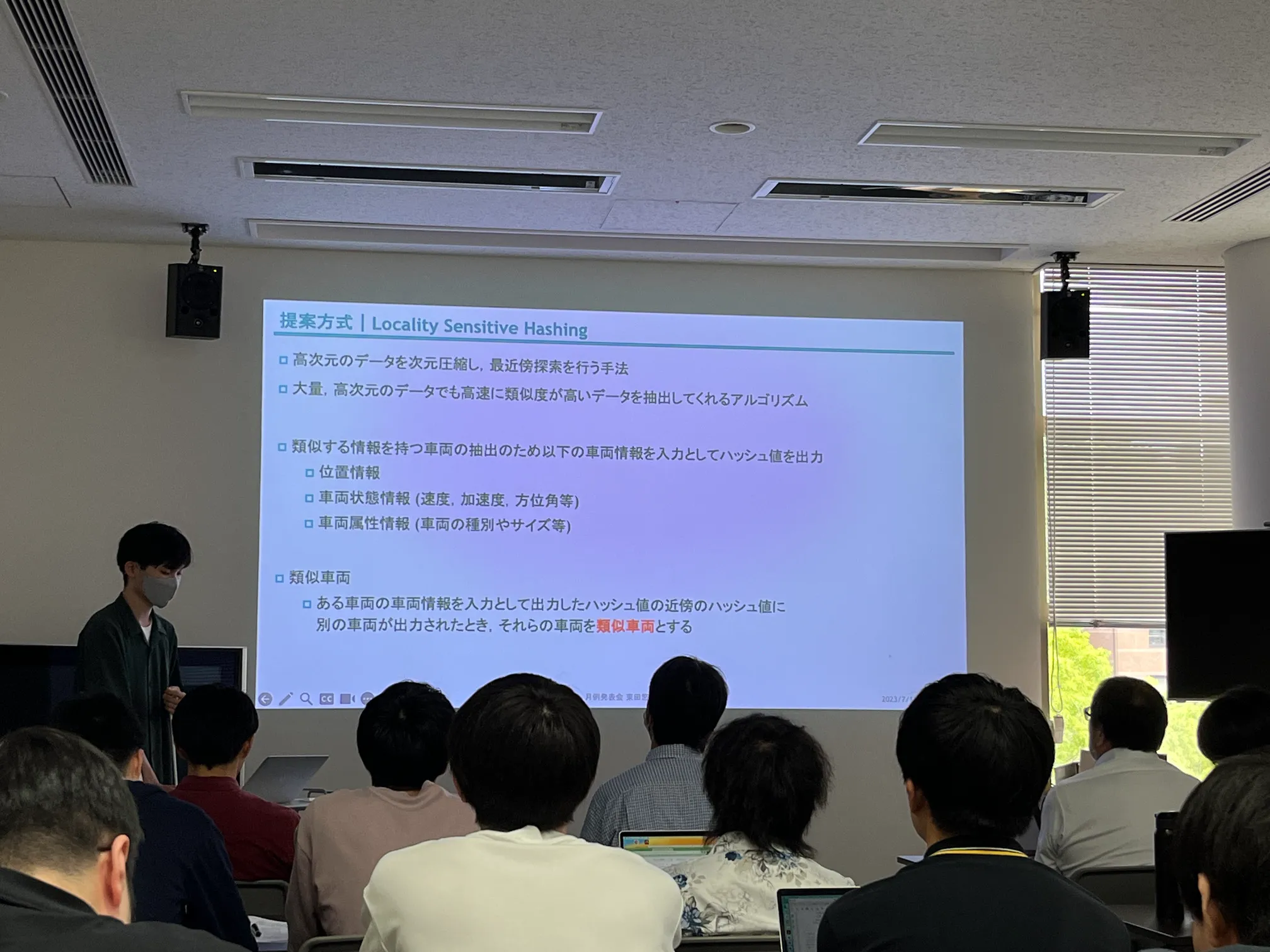
近年,車両とあらゆるものが通信を行うV2X(VehicletoEverything)通信に関する研究が盛んに行われている.V2X通信では自車両の速度や位置情報等のメッセージを周囲の車両等に送信することで車両同士の事故防止や渋滞の緩和などに繋がることが期待されている.しかし,これらのメッセージは自車両の識別子と紐づけられて平文で送信されるため,悪意のある攻撃者によって車両が送信するメッセージが盗聴・追跡されると,ドライバの位置プライバシが脅かされる問題がある.この問題を解決するために仮名を用いた方式が検討されている.仮名とは,実際の識別子の代わりに通信機器に割り当てられる仮の識別子のことであり,時間経過等の情報をトリガーとして仮名の変更を繰り返しながら通信を行うことで攻撃者による特定車両の追跡を困難なものにする.しかし,これに対してもリンク攻撃と呼ばれる攻撃が存在し,攻撃者が仮名の変更規則の解析やメッセージに含まれる位置情報等から,仮名の変更前と変更後の車両をリンクすることで特定車両を継続して追跡出来る問題がある.この問題に対処するために,様々な仮名変更方式が提案されているが明確な解決策は定まっておらず,位置プライバシの保護に効果的な仮名変更方式の検討は重要な研究課題となっている.
本研究では,車両が送信するメッセージの中から車両の速度や位置情報等で類似する情報を持つ車両をLSH(LocalitySensitiveHashing)により抽出し,類似した情報を持つ車両で協調的に仮名を変更することで攻撃者による仮名変更前後の車両のリンクを困難にし,高い位置プライバシの保護を実現する方式を提案する.
協調型自動運転におけるフリースペース情報利用の有用性の検証(佐々倉 瑛一)
近年,通信の安全性や効率向上の観点から,通信を介して情報を共有する協調型自動運転が注目されている.車載センサのみでは得られる情報には限りがあるため,協調型自動運転では路側機等の路側インフラに搭載された路側センサの情報も共有することが考えられている.
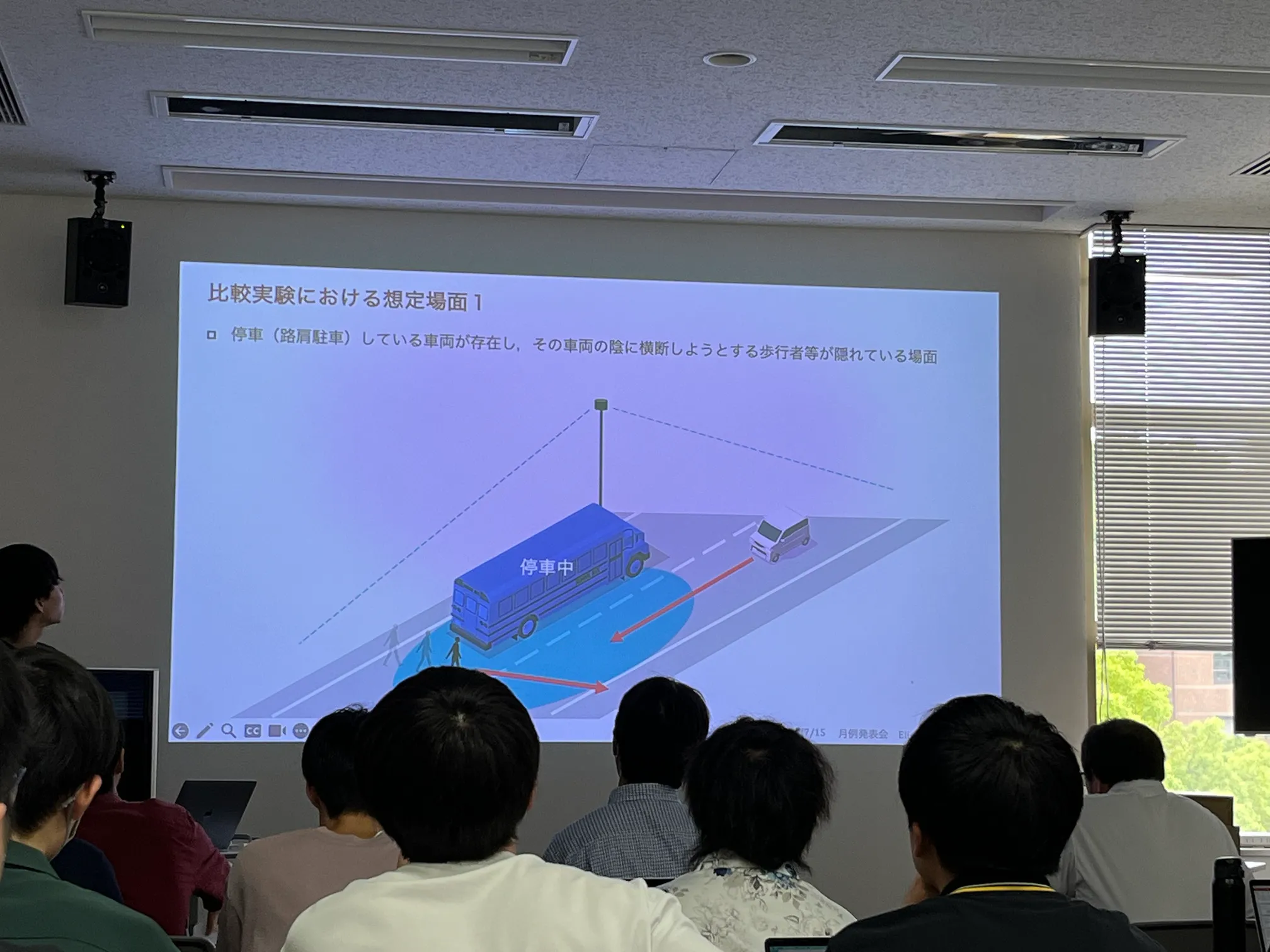
従来,協調型自動運転において共有するセンサ情報として,車両や歩行者のID,位置情報,速度情報などの物標情報が検討されてきたが,本研究ではスリースペース情報を利用することを考検討する.フリースペースとは車両や歩行者,障害物がなく,走行可能な領域を示すものである.フリースペース情報はセンサの検知できている領域と検知できていない領域とを判別できるという点で物標情報と異なり,物標情報では判断できない未知領域に対する潜在的な安全性の違いに関する情報を得ることができるという性質がある.
本研究では,この性質の違いが現れる場面を想定したいくつかの実験環境において,物標情報を利用した認識とフリースペース情報を使った認識の比較実験を行い,協調型自動運転におけるフリースペース情報の有用性を考察することを目的とする.
MUD を用いたホームネットワークにおけるIoT デバイスのセキュリティ向上システムの提案(坂本 拓馬)
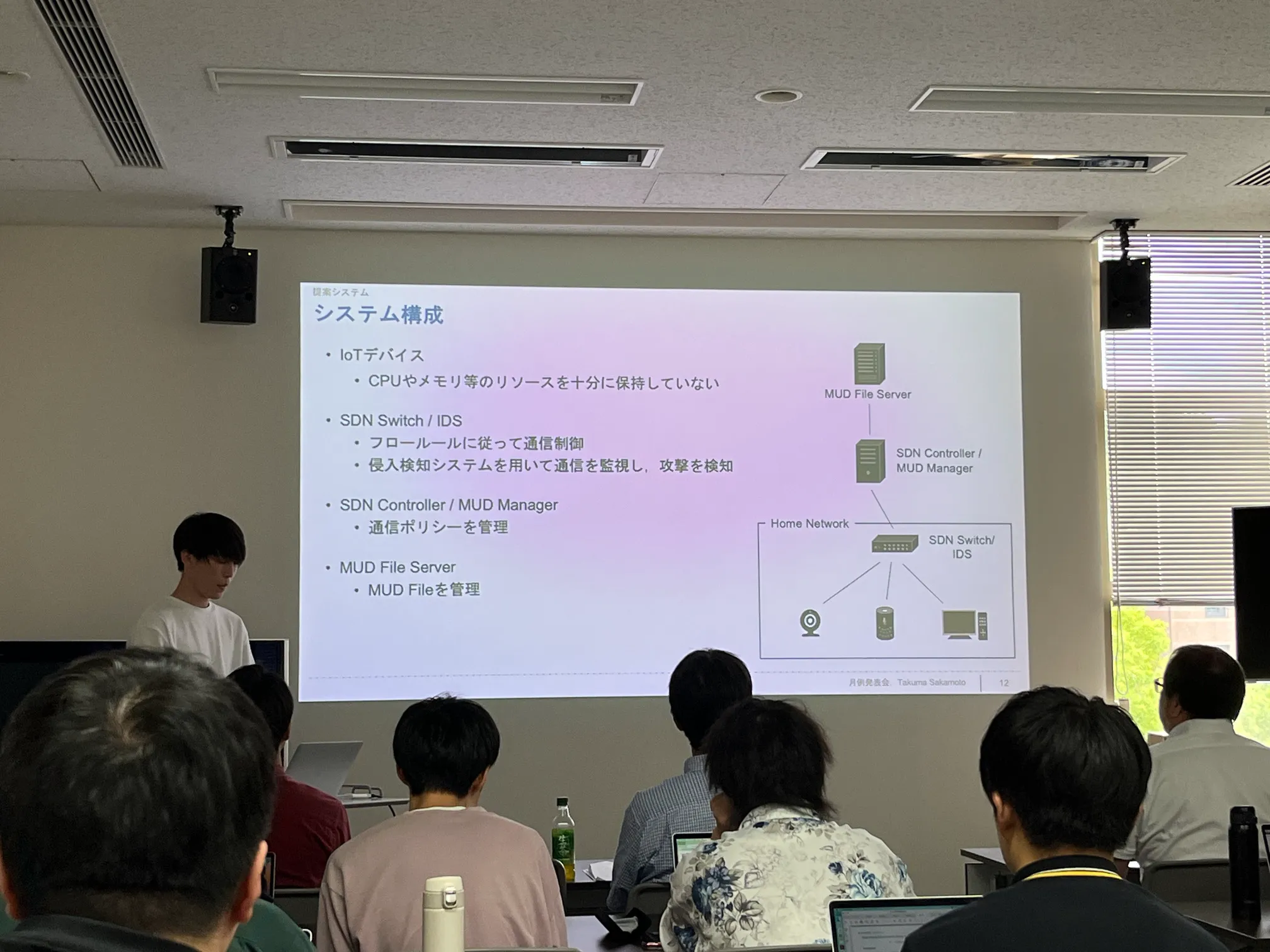
近年,IoT(InternetofThings)の発展により,多くのモノがインターネットに接続され,利便性が高まる一方で,セキュリティ上のリスクも高まっている.IoTデバイスは,最低限の性能を発揮するCPUやメモリしか保持していないことが多く,適用できる機能が限られているという問題がある.そのため,ログ出力や暗号化などのセキュリティ対策をIoTデバイスに直接適用することは困難となる.また,ホームネットワークのユーザは一般的にセキュリティに関しての知識を持っておらず,ユーザ自身でセキュリティの設定を行うことは困難である.そこで,ユーザの負担を減らしつつ,セキュリティ対策を施す手法の1つとして,IoTデバイスの製造元が通信ポリシーを記述したファイルを作成し,この通信ポリシーに従って自動的に通信を制御するMUD(ManufacturingUsageDiscription)が存在する.しかし,製造元はすべての使用環境を想定することはできないため,通信ポリシーが不十分,または厳しすぎることによって,セキュリティの問題やIoTデバイスの機能を最大限活用できないといった問題が発生する.また,MUDによる通信ポリシーは家庭内に構築したLAN環境などのローカル環境において,攻撃の侵入を許したIoTデバイスからの攻撃のようなローカル環境内部からの攻撃には弱いといった問題がある.そこで本研究では,IDS(IntrusionDetectionSystem)を用いて侵害されたローカル環境内のIoTデバイスからの攻撃を検知し,侵害されたIoTデバイスをネットワークから切り離すことで攻撃による被害を最小限にとどめるシステムを提案する.
Deep learning-based Network Slicing Technology for V2X Services(黄 一凡)
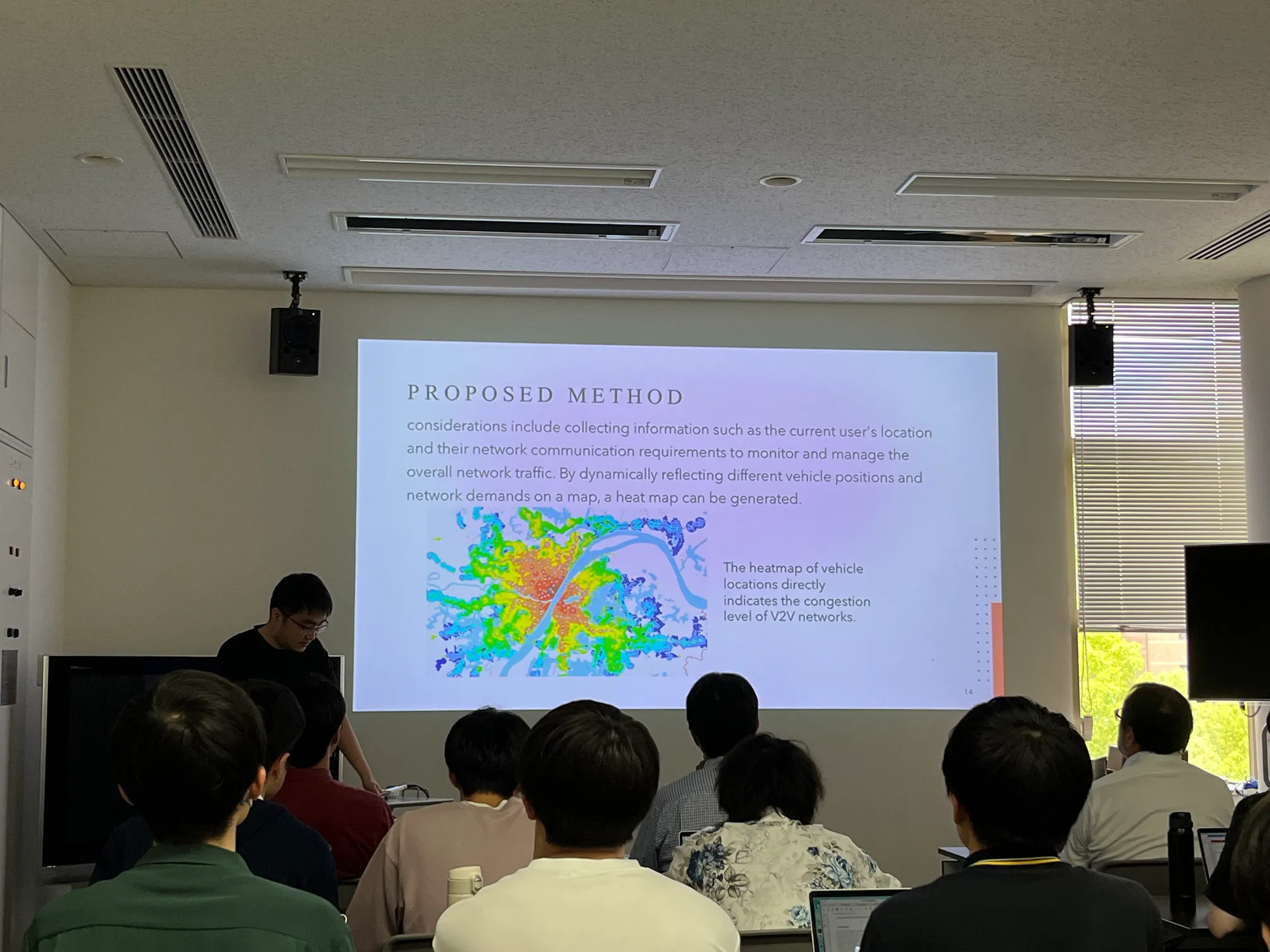
In modern society, all information and communication takeplace within networks, ranging from basic text messagingto complex applications such as remote healthcare and autonomous vehicles. In this context, innovation and optimization in network technology are particularly important. thedevelopment of network slicing technology and Vehicle-to-Everything (V2X) has brought about such innovation. Network slicing is a network architecture that provides multiple independent network services running on the same phys-ical infrastructure, improving the utilization of network re-sources. V2X technology enables vehicles to have compre-hensive connectivity, allowing them to interact with othervehicles, infrastructure, pedestrians, and networks, therebygreatly enhancing road safety and driving efficiency.However, due to the complexity and uncertainties ofthe V2X environment, traditional network management andresource allocation strategies struggle to meet its high-efficiency and reliable service requirements. Therefore, optimizing network slicing resource allocation in V2X environments has become a key research focus.This paper will explore how deep learning can be appliedto network slicing technology in V2X scenarios, aiming todiscover new optimization methods that improve the efficiency of network resource utilization and enhance servicequality.